一、倾斜检测算法
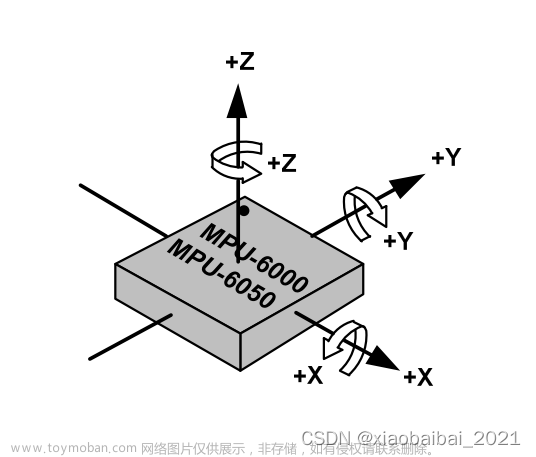
三轴加速度传感器通过检测x,y,z轴的三个方向的加速度,当传感器处于静止时,x、y的加速度均为0,z轴的加速度为g,如图所示。当井盖处于倾斜状态是如图所示,传感器x轴的加速度为Ax,与水平方向的夹角为
α
1
{\alpha _1}
α1 ,与重力加速度g的夹角为α,;同理可知,Ay和
β
1
{\beta _1}
β1为Y 轴;Az和
γ
1
{\gamma _1}
γ1为z轴。

重力加速度为输入矢量来决定物体在空间的姿态。把加速度传感器固定在物体的水平面上,当姿态改变时,加速度传感器的敏感轴随之转动一定角度,由于重力的作用,传感器敏感轴上的加速度会发生改变,因此可通过测量加速度的变化来反映物体姿态的变化。图3.9为X轴向在铅锤面内倾斜士90°内变换时随加速度g变化的输出特性。
二、移位检测算法
由于本设计的位移检测算法最终会在嵌入式设备上实现,因此算法运算不易复杂,以免造成运算量过大使系统无法正常运行。重力加速度决定物体在空间的姿态。当井盖的姿态发生变化时,加速度计上的敏感轴也随之转动,通过测量加速度的变化来反映井盖的位移状态。文章来源:https://www.toymoban.com/news/detail-835862.html



由以上推理可得,即使井盖的倾斜程度不同,但只要处于相对静止状态,其在每个轴分量上的加速度的矢量和的大小仍然为重力加速度g。由此当井盖在发生位移的过程中,通过判断三轴加速度分量的矢量和是否为重力加速度g,来判断井盖是否发生位移。文章来源地址https://www.toymoban.com/news/detail-835862.html
到了这里,关于LIS3DHTR三轴加速度计——倾斜位移检测算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!