1.简介
1.1基本参数/概念
1.1.1基本参数
1)线圈电流最大20A(外部MOSFET);
2)带SixPoint斜坡 的运动控制;
3)带有 微步插值MicroPlyer 的步进/方向 接口;
4)电压范围8-60V DC;
5)SPI和单线UART;
6)编码器接口 、2个参考开关输入;
7)最高分辨率 256微步/全步;
8)StealthChop2™ 提供安静的操作和平稳的运动;
9)中频谐振的谐振阻尼;
10)spreadCycle™ 高动态电机控制斩波器;
11)dcStep™负载相关速度控制;
12)StallGuard2™高精度无传感器电机负载检测;
13)CoolStep™电流控制可实现高达75%的节能;
14)被动制动和自由滑行模式;
1.1.2基本概念
1)不需要SPI配置的算法:
(1)StealthChop2™ :无噪音,高精度斩波器算法,适用于电机的听不见的运动和静止。允许比StealthChop更快的电机加速和减速™并将StealthChop扩展到低静止电机电流。
(2)SpreadCycle™ :高精度斩波器算法,适用于高动态运动和绝对干净的电流波形。低噪声、低共振、低振动斩波器。
(3)MicroPlyer™ :微步插值器,用于从全步开始以较低分辨率的步长输入获得完整的256微步平滑度。
2)需要SPI配置的算法:
(1)DcStep™: 负载相关速度控制。电机以尽可能快的速度移动,并且从不失步。
(2)StallGuard2™ :无传感器失速检测和机械负载测量。
(3)CoolStep™ :负载自适应电流控制可将能耗降低75%。
1.2基本原理
1.2.1三种模式
TMC5160通过两个引脚来控制它的工作模式:SD_MODE 和 SPI_MODE。
1)全功能运动控制器和驱动器(SPI控制)
当SD_MODE接地,SPI_MODE拉高,TMC5160即工作在该模式。
所有步进电机逻辑完全在TMC5160内。不需要任何软件来控制电机,只需提供目标位置即可。通过绑定低引脚SD_mode启用此模式。

在该模式下,用户通过SPI接口来设置TMC5160的寄存器。TMC5160使用自己的梯形曲线发生器来控制步进电机转动,用户需要设置:开始运动速度VSTART、第一段折线末速度V1、最大速度VMAX、停止速度VSTOP、第一段折线的加速度A1、第二段折线加速度AMAX、第四段折线的减速度DMAX、第五段折线的减速度D1。把上面的参数设置好,再设置工作模式:速度模式和位置模式。最后再设置目标位置。
如果是速度模式运行,不需要设置目标位置,电机就会开始转动。如果是位置模式,则需要设置目标位置,且目标位置与电机当前位置值不同电机才会转动。下图中的红线是电机的实际速度,不管是速度模式还是位置模式,电机的运行过程会按照下图来进行。

2)步进和方向驱动器(SPI配置、STEP/DIR控制)
当SD_MODE接高电平,SPI_MODE拉高,TMC5160工作在模式。
在该模式下,用户通过SPI接口来设置TMC5160的寄存器。TMC5160的功能和DRV8825类似,外界通过脉冲和方向引脚来控制步进电机运动。
TMC4361等外部高性能S斜坡运动控制器 或 中央CPU生成 同步的步进和方向信号。TMC5160负责智能电流和模式控制,并提供电机状态反馈。MicroPlyer可自动平滑运动。将SD_MODE连接到高电平。

3)简单步进和方向驱动器(CFG配置、STEP/DIR控制)
当SD_MODE接高电平,SPI_MODE接地,TMC5160工作在该模式下。
在该模式下,SPI接口失能,TMC5160的工作状态由CFG引脚配置,外界通过脉冲和方向引脚来控制步进电机运动。TMC5160可以完全独立工作,不需要接CPU。
TMC5160根据步进和方向信号定位电机。MicroPlyer可自动平滑运动。不需要CPU交互;配置由硬件引脚完成。TMC5160可以进行基本的待机电流控制。可选的反馈信号允许错误检测和同步。通过将引脚SPI_mode连接到低电平和SD_mode高电平来启用此模式。

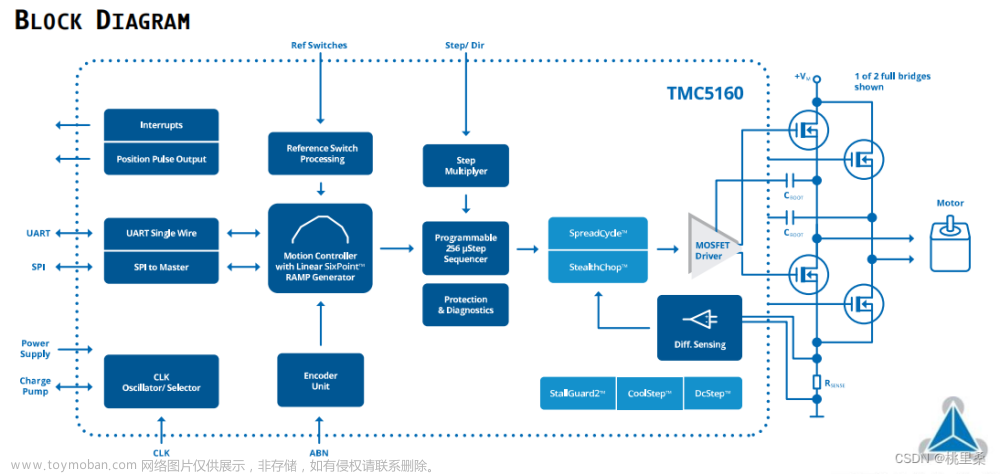
1.3控制接口
TMC5160同时支持SPI接口和带CRC检查的基于UART的单线接口。此外,在不使用串行接口的情况下,为纯STEP/DIR操作提供了独立模式。实际接口的选择是通过配置引脚SPI_MODE和SD_MODE完成的,这两个引脚可以硬连线到GND或VCC_IO,具体取决于所需接口。
1)SPI接口
2)UART接口
单线接口允许类似RS485(使用SWP和SWN)或单线接口(保持SWN打开)的差分操作。它可以由任何标准UART驱动。不需要波特率配置。
2.引脚描述
2.1引脚
| Pin | 引脚名称 | 类型 | 描述 |
| 1 |
HB1
|
高侧栅极驱动器输出 | |
| 2 |
CB1
|
自举电容器正极连接 | |
| 3 |
12VOUT
|
内部电压调节器的 11.5V 电压输出,用于栅极驱动器下管的门级
控制。为获得最佳性能,建议接 2.2μF 至 10μF 陶瓷电容器到引
脚附近的地(地平面)。通常建议容值比自举电容的容值至少
大 10 倍。如果功率器件的栅极电压由外部电压供应,将 VSA 和
12VOUT 接到外部电源。
|
|
| 4 | VSA |
11.5V和5V稳压器的模拟电源电压。通常与VS相连,滤波电容
100nf
|
|
| 5 | 5VOUT |
内部 5V 调节器的输出。为获得最佳性能,建议接 2.2μF 至 10μF
陶瓷电容器到引脚附近的地 GNDA。5VOUT 输出给芯片的 VCC
供电。
|
|
| 6 | GNDA | 模拟地。连接到引脚附近的GND平面。 | |
| 7 | SRAL |
AI
|
A 相采样电阻的地。直接连到采样电阻的 GND,以补偿 GND 互
连上的电压降。
|
| 8 | SRAH |
AI
|
A 相采样电阻。连到采样电阻的上侧。对于高电机电流,开尔
文连接是优选的。可在 SRAL 和 SRAH 设计对称 RC 滤波,以消除
来自其他驱动器或线圈 B 开关的高频开关尖峰
|
| 9 | SRBH | AI |
B 相采样电阻。连到采样电阻的上侧。对于高电机电流,开尔
文连接是优选的。可在 SRBL 和 SRBH 设计对称 RC 滤波,以消除
来自其他驱动器或线圈 A 开关的高频开关尖峰
|
| 10 | SRBL | AI |
B 相采样电阻的地。直接连到采样电阻的地,以补偿地之间互连上的电压降
|
| 11 |
TST_MODE
|
DI
|
测试模式输入。用短导线连接到GND。 |
| 12 |
CLK
|
DI
|
CLK输入。连接到GND时使用内部时钟或提供外部时钟。 内部时钟故障转移电路可防止外部时钟信号丢失。 |
| 13 |
CSN_CFG3
|
DI
|
SPI_MODE=1: SPI 片选信号(低有效)
SPI_MODE=0: 配置输入脚
|
| 14 |
SCK_CFG
|
DI
|
SPI_MODE=1: SPI 时钟信号
SPI_MODE=0: 配置输入脚
|
| 15 |
SDI_CFG1
|
DI
|
SPI_MODE=1: SPI 数据输入信号
SPI_MODE=0: 配置输入脚或
单线接口的下一个地址输入( NAI )。
|
| 16 |
SDO_CFG0
|
DIO
|
SPI_MODE=1: SPI 数据输出信号
SPI_MODE=0: 配置输入或
单线接口的下一个地址输出( NAO )。
|
| 17 |
REFL_STEP
|
DI
|
SD_MODE = 0 : 左参考输入(用于内部斜坡发生器)
SD_MODE = 1 : 步进信号输入
|
| 18 |
REFR_DIR
|
DI
|
SD_MODE = 0 : 右参考输入(用于内部斜坡发生器)
SD_MODE = 1 : 方向信号输入
|
| 19 |
GNDD
|
数字地 | |
| 20 |
VCC_IO
|
所有数字引脚的3.3V至5V IO电源电压。 | |
| 21 |
SD_MODE
|
DI
|
模式选择输入。
SD_MODE =0 : 内部斜坡发生器产生步进信号
SD_MODE = 1 : STEP / DIR 输入引脚控制驱动器
SD _ MODE = 0 和 SPI _ MODE = 0 使能 UART 操作
|
| 22 |
SPI_MODE
|
DI
|
模式选择输入。
SPI_MODE =0 : 芯片处于独立模式,引脚具有 CFG 功能
SPI_MODE = 1 :使能 SPI 接口
内部集成下拉电阻
|
| 23 |
ENCB_DCEN_
CFG4
|
DI
|
在内部斜坡发生器模式下,编码器 B 通道输入
SD _ MODE = 1,SPI _ MODE = 1 : dcStep 使能输入 .如果没有使能的 dcStep, 该引脚开路或者接到地,以确保正常工作
SPI_MODE=0:CFG 配置输入引脚
|
| 24 |
ENCA_DCIN_
CFG5
|
DI
|
在内部斜坡发生器模式下,编码器 A 通道输入
SD _ MODE = 1,SPI _ MODE = 1 : dcStep 门信号,用于同步控制;
SPI_MODE=0:CFG 配置输入引脚
|
| 25 |
ENCN_DCO_
CFG6
|
DIO
|
SD_MODE =0 :编码器 N 信号输入,或
dcStep 就绪输出信号( SD _ MODE = 1 )
SD_MODE=0,如果没有编码器,将该信号拉高或者接地。
|
| 26 |
DIAG0_SWN
|
DIO
|
诊断输出信号 DIAG0.
SD_MODE=0, SPI_MODE=1:运动控制器的中断输出或步进输,在漏电极开路模式下,使用 47k 或更小的外部上拉电阻;
SD_MODE=0 , SPI_MODE=0:单线 I / O 通讯的负端信号
|
| 27 |
DIAG1_SWP
|
DIO
|
诊断输出信号 DIAG1.
SD_MODE=0, SPI_MODE=1:运动控制器的位置比较输出或方向 输出。在漏电极开路模式下,使用 47k 或更小的外部上拉电阻;
SD_MODE=0 , SPI_MODE=0: 单线 I / O 通讯的正端信号
|
| 28 |
DRV_ENN
|
DI
|
使能输入。当该引脚被驱动到高电平时,功率 MOSFET 输出关闭(所有电机输出为悬浮(FLOATING)状态)。
|
| 29 |
VCC
|
芯片内数字电路的5V电源输入。 | |
| 30 |
VCC
|
芯片内数字电路的5V电源输入。为引脚附近的GND(GND平面)提供100nF或更大的电容器。应由5VOUT提供。建议使用2.2或3.3欧姆电阻器将噪声与5VOUT解耦。当使用外部电源时,确保VCC出现在5VOUT或VCC_IO之前或与之并联,以较晚出现的为准 | |
| 31 |
CPO
|
电荷泵电容器输出 | |
| 32 |
CPI
|
电荷泵电容器输入。使用22nF 100V电容器连接至CPO | |
| 33 |
VS
|
电机供电电压。在引脚附近提供滤波能力,并将短环路连接到GND平面。必须连接到正电桥电源电压 | |
| 34 |
VCP
|
充电泵电压。使用100nF电容器连接到VS | |
| 35 |
CA2
|
自举电容器正极连接 | |
| 36 |
HA2
|
高侧栅极驱动器输出 | |
| 37 |
BMA2
|
桥接中心和自举电容器负连接 | |
| 38 |
LA2
|
低侧栅极驱动器输出 | |
| 39 |
LA1
|
低侧栅极驱动器输出 | |
| 40 |
BMA1
|
桥接中心和自举电容器负连接 | |
| 41 | HA1 | 高侧栅极驱动器输出 | |
| 42 |
CA1
|
自举电容器正极连接 | |
| 43 |
CB2
|
自举电容器正极连接 | |
| 44 |
HB2
|
高侧栅极驱动器输出 | |
| 45 |
BMB2
|
桥接中心和自举电容器负连接 | |
| 46 |
LB2
|
低侧栅极驱动器输出。 | |
| 47 |
LB1
|
低侧栅极驱动器输出。 | |
| 48 |
BMB1
|
桥接中心和自举电容器负连接 |
3.工作配置
3.1独立工作模式(CFG配置、STEP/DIR控制)
3.1.1引脚设置
1)CFG0/CFG1:STEP输入的细分配置
| CFG1 | CFG0 | 细分设置 |
| GND | GND | 8微步,MRES=5 |
| GND | VCC_IO | 16微步,MRES=4 |
| VCC_IO | GND | 32微步,MRES=3 |
| VCC_IO | VCC_IO | 64微步,MRES=2 |
2)CFG4/CFG3/CFG2: 运行电流配置
| CFG4 | CFG3 | CFG2 | IRUN设置 |
| GND | GND | GND | IRUN=16 |
| GND | GND | VCC_IO | IRUN=18 |
| GND | VCC_IO | GND | IRUN=20 |
| GND | VCC_IO | VCC_IO | IRUN=22 |
| VCC_IO | GND | GND | IRUN=24 |
| VCC_IO | GND | VCC_IO | IRUN=26 |
| VCC_IO | VCC_IO | GND | IRUN=28 |
| VCC_IO | VCC_IO | VCC_IO | IRUN=30 |
3)CFG5: 斩波模式选择
| CFG5 | 斩波器设置 |
| GND |
spreadCycle 操作. (TOFF=3)
|
| VCC_IO |
stealthChop 操作. (
GCONF
.en_PWM_mode=1)
|
4)CFG6:保持电流设置
| CFG6 | 斩波器设置 |
| GND | 保持电流不减少,IHOLD=IRUN |
| VCC_IO | 50%.IHOLD=1/2 IRUN |
3.2错误输出(DIAG)
由下图可知,
DIAG0输出的一般是上电复位、电机错误、温度过高、堵转等功能;
DIAG1输出的一般是堵转、电机索引表、丢步、斩波器接通状态等功能;文章来源:https://www.toymoban.com/news/detail-836466.html
 文章来源地址https://www.toymoban.com/news/detail-836466.html
文章来源地址https://www.toymoban.com/news/detail-836466.html
到了这里,关于【嵌入式硬件】TMC5160说明书的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!