图的概念
图是由顶点集合及顶点间的关系组成的一种数据结构:G = (V, E)
图分为有向图和无向图
- 在有向图中,顶点对<x, y>是有序的,顶点对<x,y>称为顶点x到顶点y的一条边(弧),<x, y>和<y, x>是两条不同的边。
- 在无向图中,顶点对(x, y)是无序的,顶点对(x,y)称为顶点x和顶点y相关联的一条边,这条边没有特定方向,(x, y)和(y,x)是同一条边

就像第一幅图中,<V1,V2>顶点构成有向图,边 E1和边E2是不同指向的
在第二幅图中,<V3,V4>构成无向图,E3就是连接二者关系的唯一边。
在生活中的关系,例如微信里的朋友关系就是无向的,只有双方都相连,才能发送消息
而类是与微博等就是单向的,你关注某人,就是一条边。当他也关注你时,才构成俩条边。
完全图
- 有n个顶点的无向图中,若有n * (n-1)/2条边,即任意两个顶点之间有且仅有一条边,
- 则称此图为无向完全图
- 在n个顶点的有向图中,若有n * (n-1)条边,即任意两个顶点之间有且仅有方向相反的边,则称此图为有向完全图
下列的图都是完全图

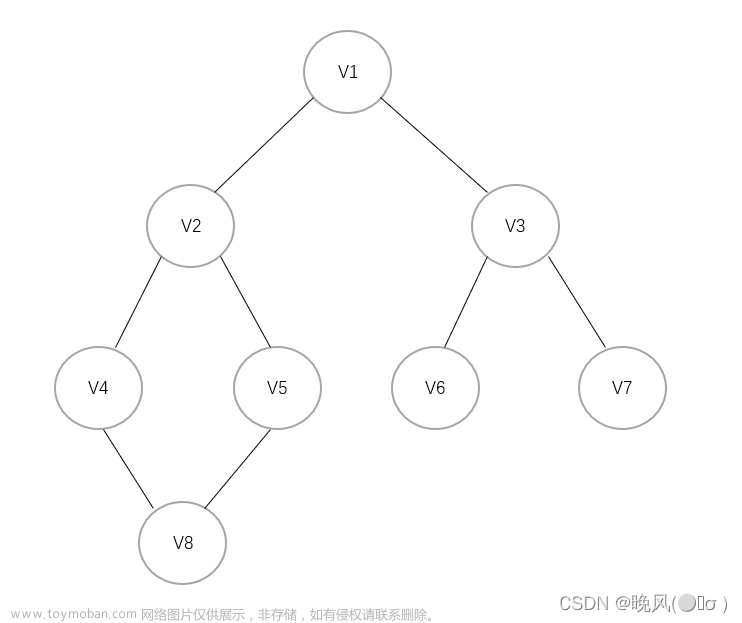
邻接顶点
- 无向图中,v-u 称互为邻接顶点
- 有向图中,v->u 称u是v的邻接顶点
与顶点直接相邻的顶点
例如:G1中 0和2 都是 1的邻接顶点
0 1 2 3互为邻接顶点

图与树的主要联系与区别
树是一种特殊的图
图不一定是树
树关注结点的存值,图关注顶点和边的权值。
图的存储结构
本质就是将边和顶点,及其关系存储起来。
用vector数组保存顶点
vector<V> _vertexs;利用map映射顶点和下标的关系
map<V, int> _vIndexMap; 为了解决俩个顶点是否相连,相连的边权值是多少的问题。
解决方法主要有邻接矩阵,和邻接表
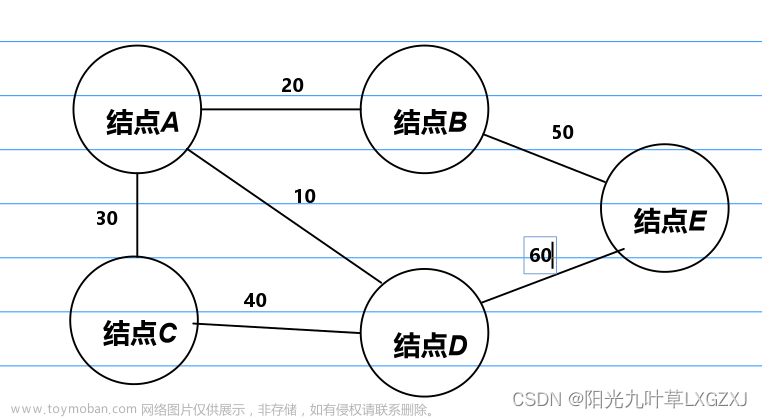
邻接矩阵
利用一个N*N的矩阵表示边和权值的关系

如果想要找到顶点A相连的顶点,通过横行找到A,在通过纵行 找到 内容不为无穷大的 B D。
为了表示边权之间的关系,修改 0和1为权值w和无穷
规定顶点自己到自己是不相连 ,不连通为无穷。

namespace Matrix
{
template<class V, class W, W MAX_W = INT_MAX, bool Direction = false>
class Graph
{
typedef Graph<V, W, MAX_W, Direction> Self;
public:
Graph()
{
}
Graph(const V* a, size_t n)
{
_vertexs.reserve(n);
for (size_t i = 0; i < n; i++)
{
_vertexs.push_back(a[i]);
_vIndexMap[a[i]] = i;
}
_matrix.resize(n);
for (size_t i = 0; i < _matrix.size(); i++)
{
_matrix[i].resize(n, MAX_W);
}
}
//获取下标
size_t GetVertexIndex(const V& v)
{
auto it = _vIndexMap.find(v);
if (it != _vIndexMap.end())
{
return it->second;
}
else
{
throw invalid_argument("顶点不存在");
assert(false);
return -1;
}
}
void _AddEdge(size_t srci, size_t dsti, const W& w)
{
_matrix[srci][dsti] = w;
if (Direction == false)
{
_matrix[dsti][srci] = w;
}
}
//添加边的关系
void AddEdge(const V& src, const V& dst, const W& w)
{
size_t srci = GetVertexIndex(src);
size_t dsti = GetVertexIndex(dst);
_AddEdge(srci, dsti, w);
}
private:
vector<V> _vertexs; //顶点集合
map<V, int> _vIndexMap; //顶点映射下标
vector<vector<W>> _matrix; //邻接矩阵
};关于图的构造,需要输入顶点,并且手动添加边。
添加边后,将邻接矩阵v->u的位置置为权值,如果是无向图,那么u->v也置上权值。
邻接矩阵的优缺点
- 邻接矩阵的存储方式非常适合稠密图
- 它能做到O(1)的效率判断俩个顶点的关系
- 不适合找出所有邻接的边
邻接表
- 邻接表:使用数组表示顶点的集合,使用链表表示边的关系
- 邻接表是指针数组,将所有邻接的边,都挂在vector下。
一般而言,邻接表有入边和出边,我们只关心出边。

边的结构 dsti w next

对于邻接表就是将有关联的边都挂载在数组上。
同样需要vector数组保存顶点,map保存顶点和下标的映射。
邻接表的内容是一个边结构,内容包含srci(不一定有),dsti,w权值,next指向下一个关联的边。
namespace LinkTable
{
template<class W>
struct Edge
{
int _dsti;//目标点
W _w; //权值
Edge<W>* _next;
Edge() = delete;
Edge(int dsti,const W& w)
:_dsti(dsti)
,_w(w)
,_next(nullptr)
{
}
};
template<class V, class W, bool Direction = false>
class Graph
{
typedef Edge<W> Edge;
public:
Graph(const V* a, size_t n)
{
_vertexs.reserve(n);
for (size_t i = 0; i < n; i++)
{
_vertexs.push_back(a[i]);
_vIndexMap[a[i]] = i;
}
_tables.resize(n, nullptr);
}
//获取下标
size_t GetVertexIndex(const V& v)
{
auto it = _vIndexMap.find(v);
if (it != _vIndexMap.end())
{
return it->second;
}
else
{
throw invalid_argument("顶点不存在");
assert(false);
return -1;
}
}
void _AddEdge(const size_t srci, const size_t dsti, const W& w)
{
//1->2
Edge* eg = new Edge(dsti, w);
eg->_next = _tables[srci];
_tables[srci] = eg;
//2->1
if (Direction == false)
{
Edge* eg = new Edge(srci, w);
eg->_next = _tables[dsti];
_tables[dsti] = eg;
}
}
void AddEdge(const V& src, const V& dst, const W& w)
{
size_t srci = GetVertexIndex(src);
size_t dsti = GetVertexIndex(dst);
_AddEdge(srci, dsti, w);
}
void Print()
{
//打印下标映射
for (size_t i = 0; i < (_vertexs.size()); i++)
{
cout << "[" << i << "]" << "->" << _vertexs[i] << endl;
}
//打印边
for (size_t i = 0; i < _tables.size(); i++)
{
cout << "[" << i << "] ";
Edge* cur = _tables[i];
while (cur)
{
cout << "- [ dsti->" << cur->_dsti << "| w:"<<cur->_w<<"] -";
cur = cur->_next;
}
cout << "null" << endl;
}
}
private:
vector<V> _vertexs; //顶点集合
map<V, int> _vIndexMap; //顶点映射下标
vector<Edge*> _tables; //邻接表(出边表)
};邻接表的优缺点
- 适合稠密图
- 适合找顶点出去的边
- 不适合用来确定俩个顶点的关系和权值
邻接矩阵和邻接表二者各有优势,相辅相成。在后续的最小生成树和最短路径中,邻接矩阵更方便
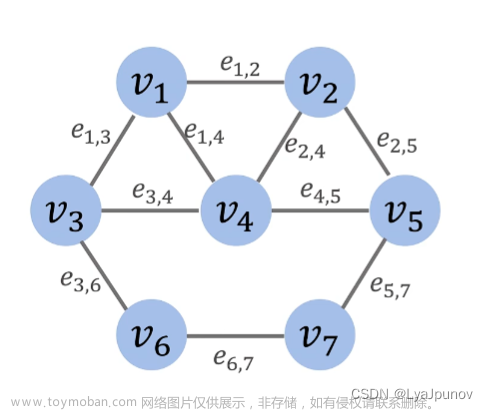
图的遍历
从v0出发,根据某种规则沿着图中各边访问图的顶点,每一个都会被访问到,且只被访问到一次。
遍历的方式分为广度优先BFS和深度优先DFS
广度优先BFS
广度优先类似于二叉树的层序遍历,从左到右依次遍历,一层到一层。

BFS的思路
- 要实现层序遍历,就要维护一个队列,A出队列时候,带A的相邻B C D入队列
- 当 A 出完之后,B再出 就会带A进,为了防止重复带入,再维护一张vector的数组,出过了就标记,只有当标记容器没有被标记时,才带进队列。

void BFS(const V& src)
{
size_t srci = GetVertexIndex(src);
//队列和标记数组
queue<int> q;
vector<bool> visited(_vertexs.size(), false);
q.push(srci);
visited[srci] = true;
while (!q.empty())
{
size_t front = q.front();
q.pop();
cout << front << ":" << _vertexs[front] << endl;
for (size_t i = 0; i < _vertexs.size(); i++)
{
//入队列
if (_matrix[front][i] != MAX_W)
{
if (visited[i] == false)
{
q.push(i);
//修改标记
visited[i] = true;
}
}
}
}
}
深度优先DFS
类似于二叉树的先序遍历,从上从往下,一直遍历到最深,知道遇到访问或结束,就返回。

DFS需要一个起始点,标志从哪里开始遍历,需要一个visited数组,标记哪些顶点被访问过了
void _DFS(size_t srci, vector<bool>& visited)
{
cout << srci << ":" << _vertexs[srci] << endl;
visited[srci] = true;
for (size_t i = 0; i < _vertexs.size(); i++)
{
if (_matrix[srci][i] != MAX_W && visited[i] == false)
{
_DFS(i, visited);
}
}
}
void DFS(const V& src)
{
size_t srci = GetVertexIndex(src);
vector<bool>visited(_vertexs.size(), false);
_DFS(srci, visited);
}
 文章来源:https://www.toymoban.com/news/detail-836902.html
文章来源:https://www.toymoban.com/news/detail-836902.html
Gitee:提取完整代码文章来源地址https://www.toymoban.com/news/detail-836902.html
到了这里,关于【数据结构】图的存储与遍历的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!