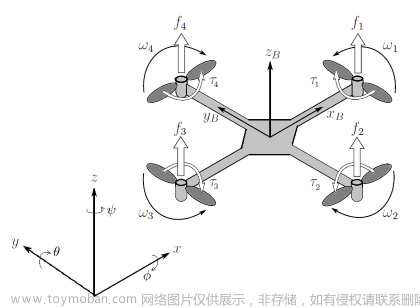
飞行器状态控制系统是用于自动稳定和控制飞行器绕质心运动的整套装置,主要用于保证飞行器的稳定飞行,并保证其根据指令飞向目标。常规来讲,飞行器状态控制系统主要由控制器、舵伺服机构、飞行体等组成,如下图所示。
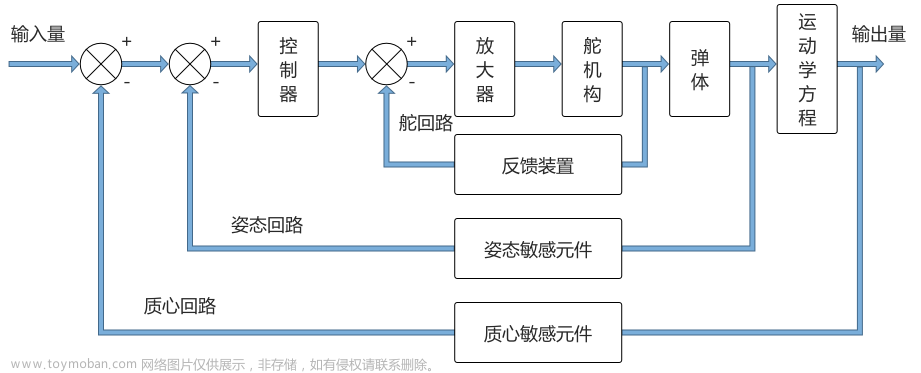
▲飞行器控制系统结构框图
对飞行器状态进行控制能够克服飞行过程中可能遭受的各种干扰,实时准确地控制飞行器姿态,使其自动按预定轨道飞行,因此飞行器状态控制精度的好坏是决定飞行器飞行成败的关键。作为至关重要的分系统,状态控制系统有着功能繁多、构成复杂、可靠性要求高等特点。随着近年来计算机硬件、软件技术的突破,机电控制技术的日益成熟,飞行器状态控制系统的设计复杂程度已提升至一个新的阶段。考虑到飞行器设计成本的高昂和测试阶段可能涉及的风险,可以通过仿真工具搭建飞行器状态控制系统的仿真模型,提升飞行器状态控制系统研发的设计效率,有效缩短设计周期。
本文主要使用国产自主可控的天目全数字实时仿真软件SkyEye作为飞行器状态控制系统的仿真工具。SkyEye是一款基于可视化建模的硬件行为级仿真平台,支持用户通过拖拽的方式对飞行器状态控制系统进行建模和仿真,可在无需二次开发的情况下运行二进制可执行文件,切实解决实际工程中存在的问题。基于SkyEye的虚拟飞行器状态控制系统如下图所示:

▲基于SkyEye的虚拟飞行器状态控制系统
SkyEye对飞行器状态控制系统进行全硬件仿真,包括C67xx、1553B、FPGA等。上位机发送bc、rt、485、422进行消息测试,读取csv文件,并进行固定消息回复、周期消息回复。422、485消息由FPGA进行处理。用户可通过系统回复的对应消息来确认飞行器的状态。文章来源:https://www.toymoban.com/news/detail-837739.html
以周期消息为例,首先设置周期消息回复时间间隔。在系统测试时,上位机发送一条1553B消息,该消息内容说明测试的功能。系统回复一条FPGA串口消息,由MT模型发送到上位机并触发串口周期消息回复,系统判断多条周期消息成功后,回复一条1553B消息,MT监控消息并在上位机中显示。用户可通过对比测试文档,验证消息正确性。文章来源地址https://www.toymoban.com/news/detail-837739.html
到了这里,关于SkyEye:助力飞行器状态控制系统仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!