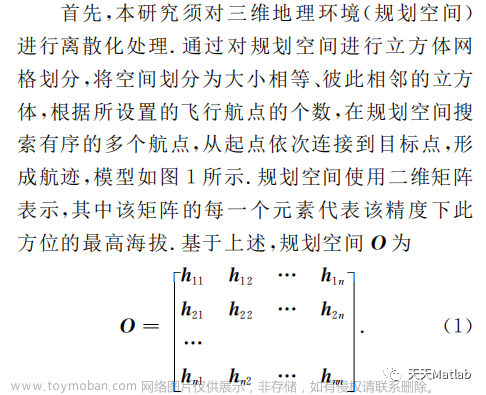
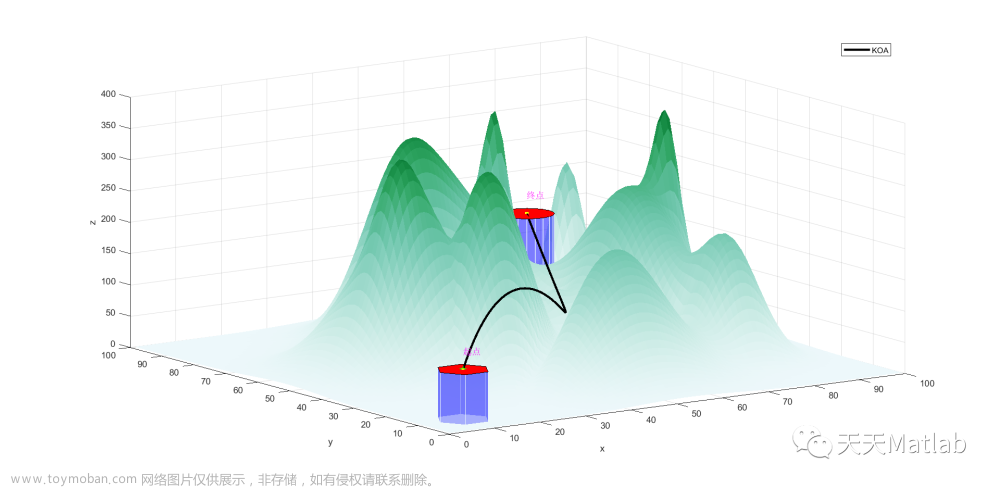
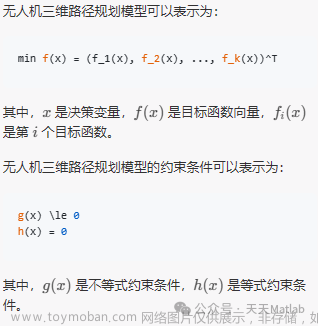
一、无人机路径规划模型介绍

二、算法介绍
斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO),是由Abdelazim Hussien于2024年提出的一种基于群体的新型元启发式算法,它从自然界中观察到的斑翠鸟独特的狩猎行为和共生关系中汲取灵感。PKO 算法围绕三个不同的阶段构建:栖息/悬停猎物(探索/多样化)、潜水寻找猎物(开发/集约化)和培养共生关系。这些行为方面被转化为数学模型,能够有效地解决不同搜索空间中的各种优化挑战。
2024最新算法:斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO)求解23个基准函数-CSDN博客
参考文献:
[1]Pied Kingfisher Optimizer: A new bio-inspired algorithm for solving numerical optimization and industrial engineering problems
close all
clear
clc
dbstop if all error
warning ('off')
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=100;%种群大小(可以自己修改)
maxgen=100;%最大迭代次数(可以自己修改)
[fMin5,bestX5,ConvergenceCurve5] = PKO(pop, maxgen,Xmin,Xmax,dim,fobj);
cost=MyCost(bestX5,2);%'路径成本','威胁成本','高度成本','转角成本'
%% 计算航迹坐标
BestPosition5 = SphericalToCart(bestX5);
%% 保存各算法的目标函数值及收敛曲线
save fMin5 fMin5
save ConvergenceCurve5 ConvergenceCurve5
save cost cost
%% 保存航迹坐标
save BestPosition5 BestPosition5
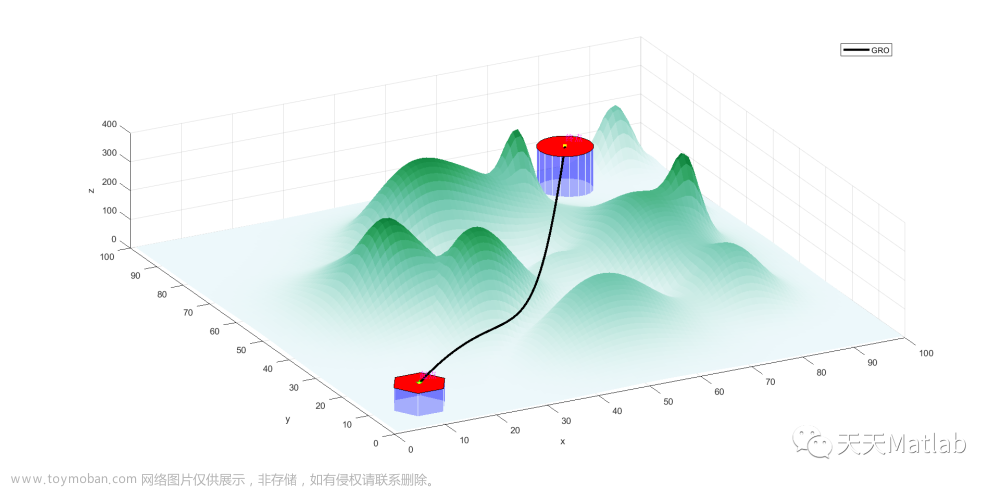
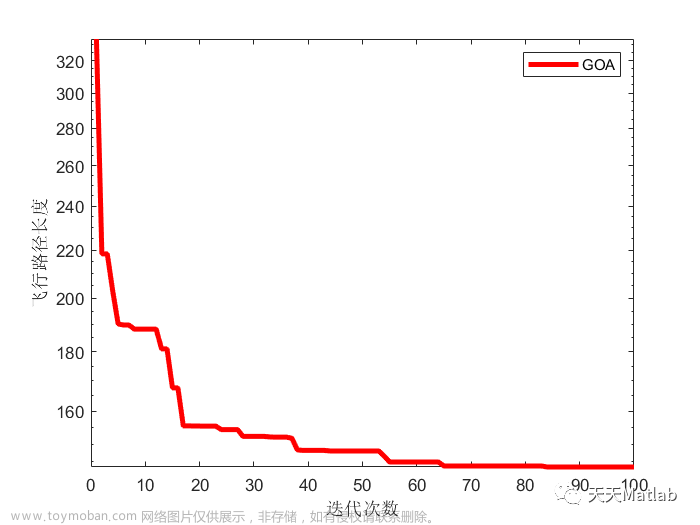
三、部分结果


 文章来源:https://www.toymoban.com/news/detail-838604.html
文章来源:https://www.toymoban.com/news/detail-838604.html
四、完整MATLAB代码
基于斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO)的无人机三维路径规划(MATLAB)文章来源地址https://www.toymoban.com/news/detail-838604.html
到了这里,关于基于斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO)的无人机三维路径规划(MATLAB)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!