1、通讯
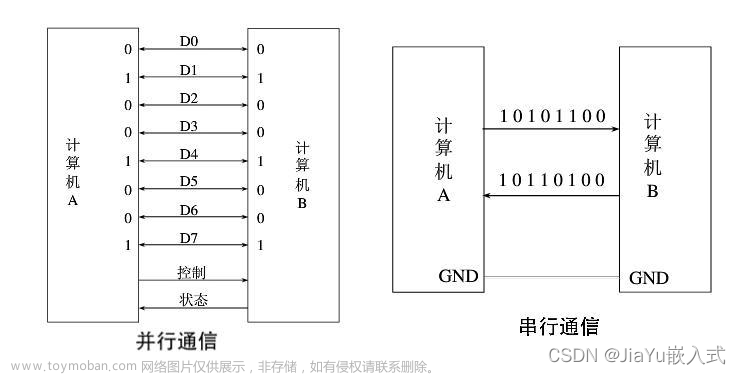
1.1 并行通讯
定义:一条信息的各位数据被同时传送的通讯方式称为并行通讯;
特点:
各个数据位同时发送,传送速度快、效率高,但有多少数据位就需要多少根数据线,因此传送成本高,并且只能适用于近距离(相距数米)的通讯距离;
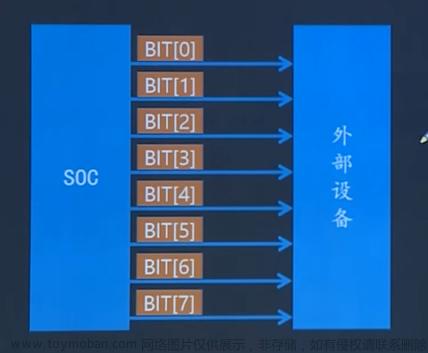
1.2 串行通讯
定义:一条信息的各个位数据被逐位按照顺序传送的通讯方式称为串行通讯;
特点:
数据位传送,传按位顺序进行,最少只需要一根传输线就可以实现完成功能,这个成本低但是传送的速度很慢。串行通讯的距离可以从几米到几千米;
分类1-单工
如果在通信过程的任意时刻,信息只能由一方A传到另一方B,这个就成为单工;
分类1-半双工
如果在任意时刻,信息既游A方传到B方,但是只能由一个方向上的传输存在,那么这个方式称为半双工传输;
分类1-全双工
如果在任意时刻,线路上存在A到B和B到A的双向信号传输,那么这个就称为全双工;
在串行通信当中,由于是一位一位地进行数据传送,为了把每个字节区别开来,需要收发双方在传送数据的串行信息流当中,加入一些标记信号位。根据所添加的标记信号位的不同方式,分成同步通信和异步通信两种。
分类2-异步通信
在单片机当中,主要是使用异步通信方式。
异步通信在添加标记信号位的时候,把所传送的数据以字节位单位。每个字节前加上一位起始信号,每个字节的后面加上停止位,停止位可以说1位、1.5位或者2位。有时候,还要加上一位奇偶校验位。
1(起始位)+2(停止位)+1(奇偶校验位) K4位标记信号位。
这样,异步通信方式的效率就比较低。
当然,异步通信的好处是通信设备简单、便宜,但是传输效率较低(因为开始为和停止位的开锁所占比例较大)。放松端不需要在发送一帧之前和接收端进行协调(不需要先进行比特同步)。
异步通信也可以是以帧作为发送的单位。接收端必须随时做好接收端的准备。这个时候,帧的首部必须设有一些特殊的比特组合,使得接收端能够找到一帧的开始。
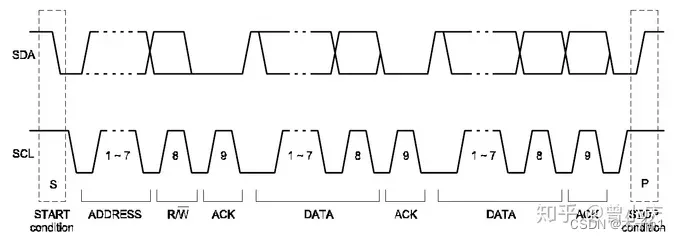
分类2-同步通信
同步通信是指将所传送的数据以多个字节(100字节以上)为单位,在其前后添加标志。
“同步通信”的通信双方必须先建立同步,即双方的时钟要调整到同一个频率。收发双方不停的发送和接收信号连续的同步比特流。但是这个时候还有两种不同的同步方式。一种是使用全网同步,用一个非常精确的主时钟对全网所有结点上的时钟进行同步。另一种是使用准同步,各个结点的时钟之间允许有非常微小的误差,然后采用其他措施实现同步传输。文章来源:https://www.toymoban.com/news/detail-838777.html
文章来源地址https://www.toymoban.com/news/detail-838777.html
到了这里,关于同步、异步、全双工、半双工的区别的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!