一、准备工作
有关OPENMV最大色块追踪及与STM32通信内容,详情见【STM32+HAL】与OpenMV通信
二、所用工具
1、芯片:STM32F103C8T6
2、CUBEMX配置软件
3、KEIL5
4、OPENMV
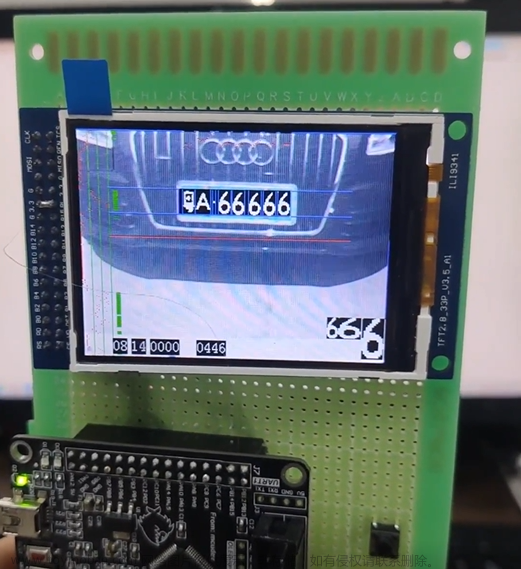
三、实现功能
寻找黑色矩形,并将最大矩形的四个边缘坐标发送给STM32文章来源:https://www.toymoban.com/news/detail-840086.html
四、OpenMV IDE
1、寻找最大的矩形,并沿矩形边框绘制线条
# 寻找最大的矩形
# 沿矩形边框绘制线条
import sensor, image, time
# 相机初始化
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE) # 设置图像格式为灰度
sensor.set_framesize(sensor.QQQVGA) # 设置图像大小
sensor.skip_frames(time=2000) # 等待设置生效
clock = time.clock() # 用于跟踪帧率
while(True):
clock.tick()
img = sensor.snapshot().lens_corr(1.8)
# 使用find_rects()方法寻找图像中的矩形
rects = img.find_rects(threshold = 10000)
# 初始化变量来存储最大矩形的信息
max_area = 0
max_rect = None
# 遍历所有找到的矩形,找出面积最大的矩形
for rect in rects:
# 计算当前矩形的面积
area = rect.w() * rect.h()
# 如果当前矩形的面积大于之前记录的最大面积,则更新最大矩形和最大面积
if area > max_area:
max_area = area
max_rect = rect
# 如果找到了最大的矩形,则绘制它的边框
if max_rect:
corners = max_rect.corners() # 获取最大矩形的四个角点
# 绘制最大矩形的四条边
for i in range(len(corners)):
start_point = corners[i]
end_point = corners[(i+1) % 4]
img.draw_line(start_point[0], start_point[1], end_point[0], end_point[1], color = 255)
print(corners) # 打印最大矩形的四个角点
2、完整通信+识别代码
# 寻找最大的矩形
# 沿矩形边框绘制线条
import sensor, image, time
import ustruct
from pyb import UART
# 串口初始化
uart = UART(3, 115200, timeout_char=200)
uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters
# 相机初始化
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE) # 设置图像格式为灰度
sensor.set_framesize(sensor.QQQVGA) # 设置图像大小
sensor.skip_frames(time=2000) # 等待设置生效
clock = time.clock() # 用于跟踪帧率
def send_data(x):
global uart;
uart.write(bytearray([0xb3,0xb3]))
uart.write(str(x))
uart.write(bytearray([0x0d,0x0a]))
while(True):
clock.tick()
img = sensor.snapshot().lens_corr(1.8)
# 使用find_rects()方法寻找图像中的矩形
rects = img.find_rects(threshold = 10000)
# 初始化变量来存储最大矩形的信息
max_area = 0
max_rect = None
# 遍历所有找到的矩形,找出面积最大的矩形
for rect in rects:
# 计算当前矩形的面积
area = rect.w() * rect.h()
# 如果当前矩形的面积大于之前记录的最大面积,则更新最大矩形和最大面积
if area > max_area:
max_area = area
max_rect = rect
# 如果找到了最大的矩形,则绘制它的边框
if max_rect:
corners = max_rect.corners() # 获取最大矩形的四个角点
# 绘制最大矩形的四条边
for i in range(len(corners)):
start_point = corners[i]
end_point = corners[(i+1) % 4]
img.draw_line(start_point[0], start_point[1], end_point[0], end_point[1], color = 255)
send_data(corners)
print(corners) # 打印最大矩形的四个角点
五、源码提供
【STM32+OPENMV】矩形识别资源文章来源地址https://www.toymoban.com/news/detail-840086.html
到了这里,关于【STM32+OPENMV】矩形识别的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!