阿木实验室推出的开源项目校园赞助活动,再次迎来开发者参与!
苏州大学李子强同学,在Prometheus开源仿真架构的基础上进行了二次开发且发表了相关论文。其论文《面向大型三维环境的无人机多地图协同探索》收录于IEEE机器人与仿生国际会议,根据活动规则,将获得阿木实验室赞助的奖学金2000元!
现将相关论文内容分享给大家,鼓励更多的开发者加入到我们校园赞助活动中来,只要你是参与开源项目或在相关技术领域获得荣誉成果的用户,参与活动就有机会获得阿木的奖学金!
主题:面向大型三维环境的无人机多地图协同探索

DOI:10.1109/ROBIO58561.2023.10354550
Author:Ziqiang Li, Shumei Yu, Rongchuan Sun and Lining Sun
Author Affiliation:Soochow University
*: Corresponding author:Rongchuan Sun
EI会议:IEEE机器人与仿生国际会议
作者:李子强,郁树梅,孙荣川,孙立宁
作者单位:苏州大学
通讯作者:孙荣川
内容概述:
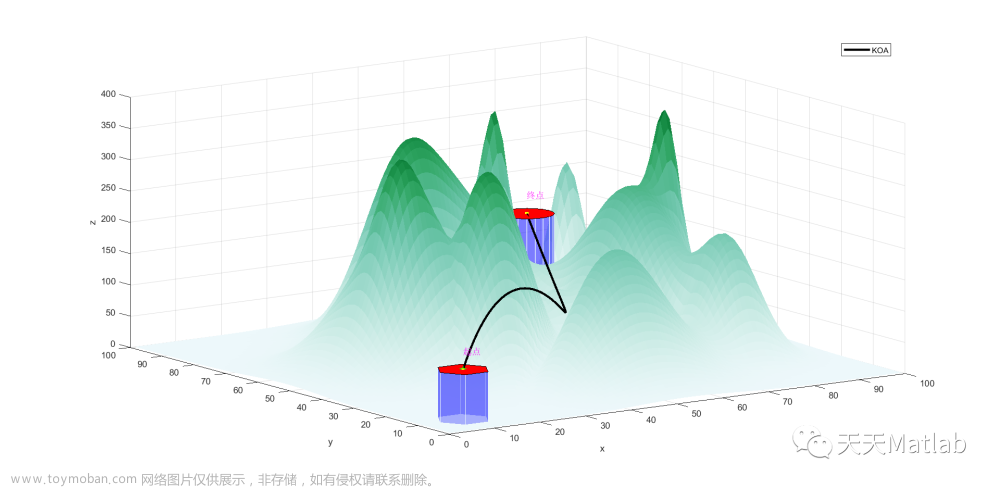
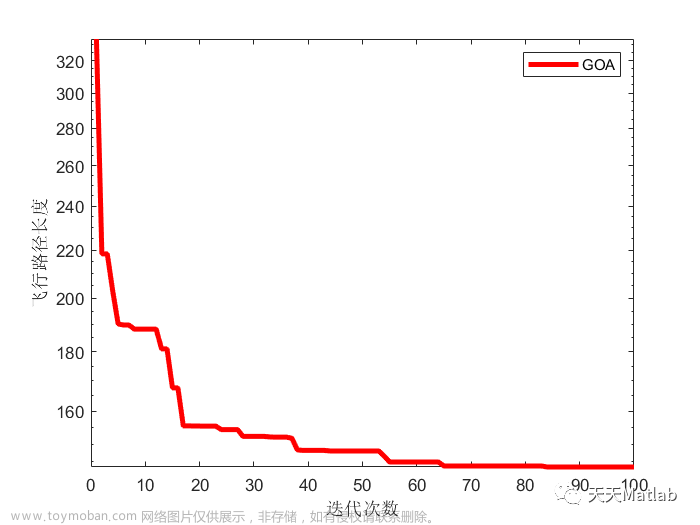
为了降低地图维护成本,提高三维环境自主探索中的搜索效率,提出了一种面向无人机的大规模三维地图构建新算法。该规划器采用多地图协同方案,在有限范围的高精度子地图上进行精确的边界检测,低精度的全局地图提供额外的信息来指导规划粗略的勘探方向。因此,边界是进行增量搜索,而不是重复搜索,并确定最优边界。在三维环境下,其性能是通过比较波前边界(WFD)算法和次优视图规划器(NBVP)算法进行评估,所提算法具有较高的探索效率。
引用Prometheus说明:
为了系统地评价其有效性提出的勘探方法,我们利用开源平台Prometheus[20]进行二次开发构建探索算法,它提供了一个无人机模型以及基于px4的飞行控制模型。无人机配备立体摄像头,能够提供环境的实时深度图像和彩色图像。文中引用为“In order to systematically evaluate the effectiveness of the proposed exploration method, we conducted validation using a open-source development framework named Prometheus[20] which provides a UAV model as well as a PX4-based flight control model to build exploration algorithm. The drone equips a stereo camera that provides real-time depth images of environments.”。



如需了解更多论文内容,点击跳转:https://ieeexplore.ieee.org/abstract/document/10354550
- END-
阿木实验室校园赞助计划
阿木实验室校园赞助计划主要对象为参与开源项目或在相关技术领域获得荣誉成果的用户。活动分为两部分,分别是技术文章创作和论文奖学金,根据活动规则可分别获得一、二、三等奖的奖励,奖金最高可达10000元,欢迎大家踊跃咨询。
阿木实验室,公众号:阿木实验室阿木实验室校园赞助,万元奖学金等你来挑战!文章来源:https://www.toymoban.com/news/detail-840724.html
阿木实验室面向所有在校学生发起校园赞助活动!只要你是参与开源项目或在相关技术领域获得荣誉成果的用户,参与活动就有机会获得阿木的奖学金,名额有限快来参与~文章来源地址https://www.toymoban.com/news/detail-840724.html
到了这里,关于论文分享 | 面向大型三维环境的无人机多地图协同探索的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!