概述
VL53L8CX是一款8x8多区域ToF测距传感器,它在环境光下能够在降低功耗的同时增强性能。该传感器基于意法半导体的FlightSense技术设计,能够提供最高400 cm的精确测距,并具有65°对角线视场。
VL53L8CX集成了功能强大的新一代VCSEL,以及两个先进的超表面镜头。硬件封装在创新的“一体化”模块中。这使得它能够适用于更广泛的高性能应用场景,如低功耗系统激活、手势识别、机器人SLAM、液位监控等多种用途。
VL53L8CX采用意法半导体的专利算法,可以检测和跟踪视场内的多个目标,具有64区域深度测量能力。意法半导体的直方图确保盖片玻璃串扰抗扰度超过60 cm。
与所有基于意法半导体FlightSense技术的ToF传感器一样,VL53L8CX能够测量绝对距离,不受目标颜色和反射率的影响。
VL53L8CX支持SPI和I²C接口,确保高频帧率和短启动时间。
VL53L8CX的VCSEL发射940 nm的完全不可见红外光。这种VCSEL具有1级认证,对眼睛是安全的。使用VL53L8CP可以进行场景浏览和多区域检测。这归因于软件可定制的检测阵列。它能快速且低功耗地检测到人体存在。此类检测被称为微深度图。
最近在弄ST的课程,需要样片的可以加群申请:615061293 。

视频教学
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
主要特点
新一代多区域飞行时间 (ToF) 传感器的功耗较低,提高了距离测距性能
- 可以使用4x4或8x8独立区域测量功能进行多区域距离测量
- 自主低功耗模式,通过可编程中断阈值唤醒主机
- 增强了环境光条件下的性能,测量距离可达400 cm
- 在每个区域均可进行多目标检测和测距
- 直方图处理和算法补偿可最大程度减少甚至消除盖片串扰的影响
- 每个区域都配有运动指示器,用于显示目标是否以及如何移动
- 60 Hz帧速率能力
完全集成的微型模块,具有宽视野 (FoV)
- 新一代大功率发射器:940 nm不可见光VCSEL(垂直腔面发射激光器)集成式模拟驱动器
- 65°对角线方形视场,发射器和接收器采用衍射光学元件 (DOE)
- 单光子雪崩二极管 (SPAD) 接收阵列
- 运行固件的低功耗微控制器
- 尺寸:6.4 x 3.0 x 1.75 mm
可轻松集成
- 单回流焊元件
- 需要1.8 V核心电源和3.3 V AVDD电源
- 可选1.2 V或1.8 V IOVDD接口电压等级
- I²C(可达1 MHz)或SPI(可达3 MHz)接口
- 兼容多种盖片材料
- 可隐藏在深色盖片之后

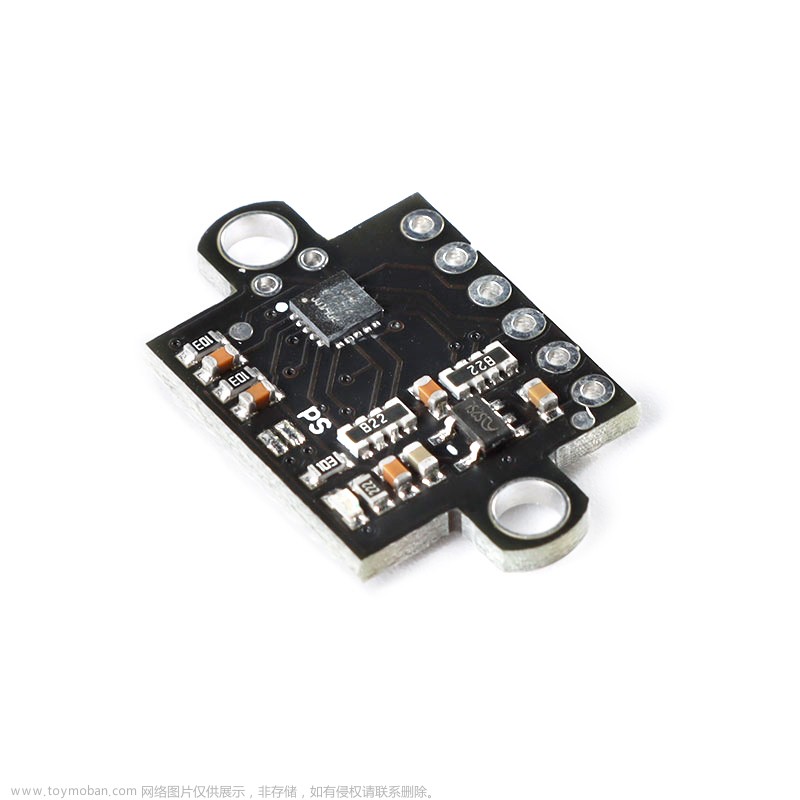
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
技术规格

系统框图

应用示意图
IIC模式下应用示意图。
SPI模式下应用示意图。

区域映射
VL53L8CX支持4x4模式的区域映射和8x8模式的区域映射。
下图显示了4x4模式下的区域定义。总共有16个区域,它们沿着一行递增,然后再开始新的一行。物理视图是从设备顶部朝向镜头。如下图所示,每个区域的编号对应于传感器返回的ZoneIDs。

下图显示了8x8模式下的区域定义。总共有64个区域,它们沿着一行递增,然后再开始新的一行。物理视图是从设备顶部朝向镜头。如下图所示,每个区域的编号对应于传感器返回给主机的ZoneIDs。

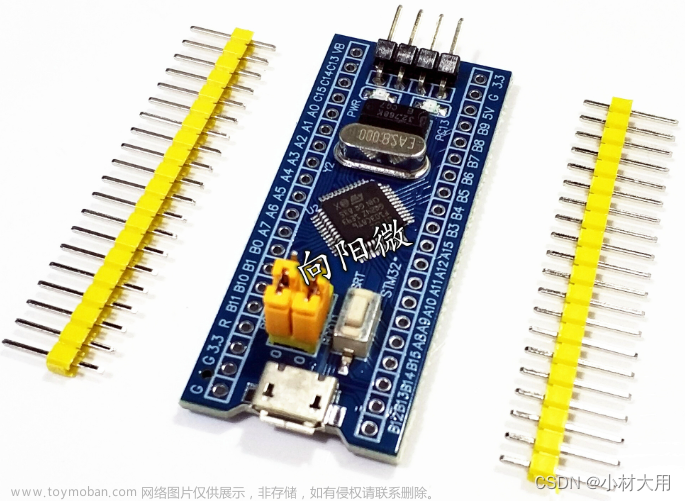
生成STM32CUBEMX
选择MCU
测试版所用的MCU为STM32G431CB。
串口配置
查看原理图,PA9和PA10设置为开发板的串口。
配置串口。
IIC配置
在这个应用中,VL53L8CX模块通过I2C(IIC)接口与主控器通信。具体来说,VL53L8CX模块的I2C引脚连接到主控器的PA8和PB5两个IO口。


配置IIC为快速模式,速度为400k。
LPn 设置
若进行IIC通讯,LPn设置为高电平状态。

这里对应管脚为PA12。

配置为PA12。

X-CUBE-TOF1
本节介绍在不需要使用样例应用时如何使用STM32CubeMX将X-CUBE-TOF1软件包添加到项目中。有了这样的设置,就只配置了驱动层。

串口重定向
打开魔术棒,勾选MicroLIB
代码配置
在custom_ranging_sensor.c代码中,有IO口驱动VL53L8CX进行复位的代码,由于没有配置对应的IO,所以需要注释掉。

Tera Term配置
打开Tera Term并使用以下设置进行配置。

演示结果
配置完成侯可以在Tera Term下查看结果,如下是4*4的显示。
可以切换到8*8显示。文章来源:https://www.toymoban.com/news/detail-841235.html
 文章来源地址https://www.toymoban.com/news/detail-841235.html
文章来源地址https://www.toymoban.com/news/detail-841235.html
到了这里,关于VL53L8CX驱动开发(1)----驱动TOF进行区域检测的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!