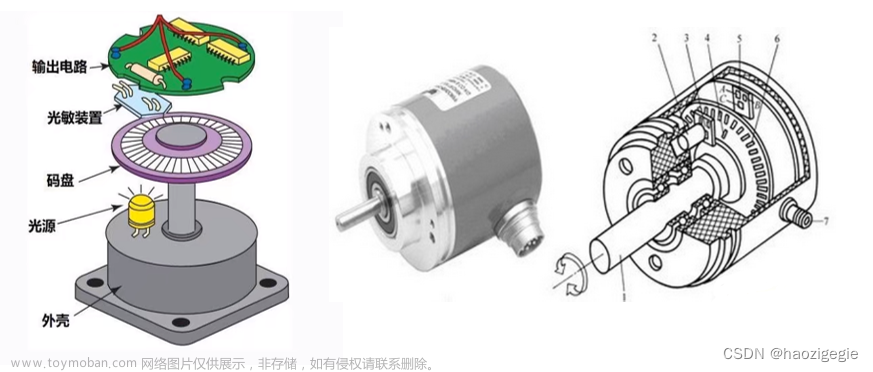
一、编码器简介


编码电机


旋转编码器

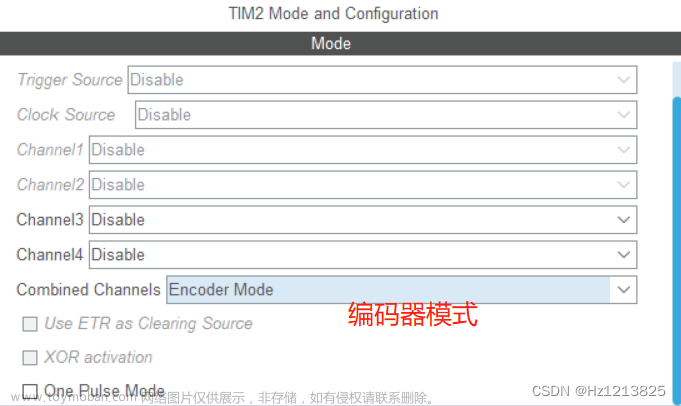
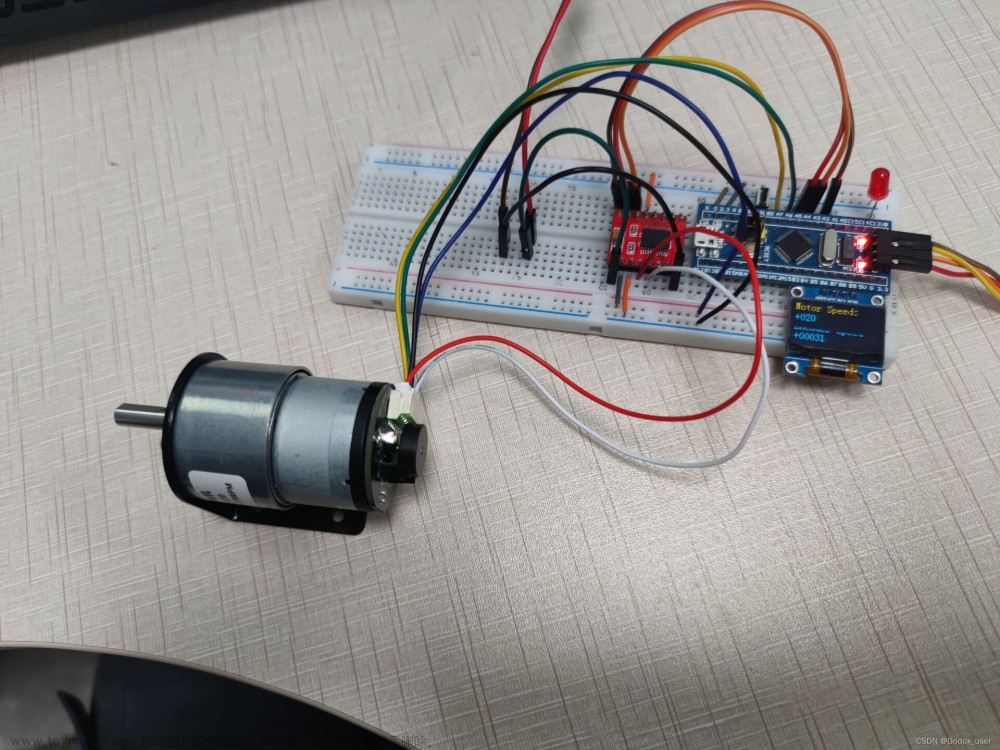
A,B相分别接通道一和二的引脚,VCC,GND接单片机VCC,GND
二、正交编码器工作原理
以前的代码是通过触发外部中断,然后在中断函数里手动进行计次。使用编码器接口的好处就是节约软件资源。对于频繁执行,操作简单的任务,一般设计一个硬件电路模块来自动完成。
使用定时器的编码器接口,再配合编码器,就可以测量旋转速度和旋转方向。编码器测速一般应用在电机控制的项目上。使用PWM驱动电机,再使用编码器测量电机的速度,然后再使用PID算法进行闭环控制。
平横车经常用到
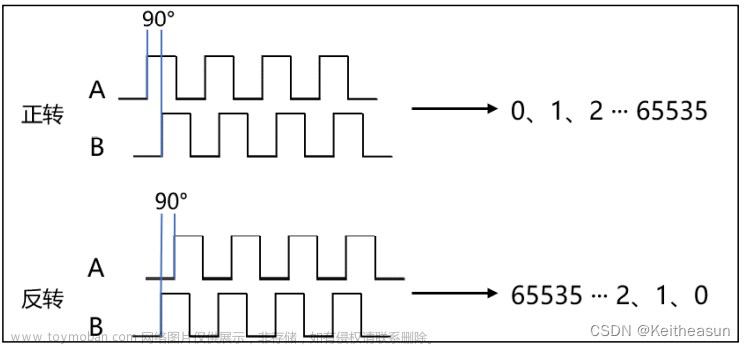
1.计数方式
2.框图分析
由图可知,只有CH1和CH2有编码器接口,且编码器只用到了输入捕获结构体的输入滤波和边沿检测器,则其余的结构体成员都不用区配置。

由框图可知,配置Encoder需要配置GPIO,输入捕获结构体的部分元素,时基单元,我们一般给ARR为65535-1,即最大计数量程,防止计数溢出。PSC=1-1,不分频,直接72M进行计数
3.计数方向与编码器信号的关系


TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising)
这里TIM_EncoderMode_TI12即对应上面的计数边沿,仅在TI1和TI2计数就相当于只在A或B相的边沿计数,我们一般都使用AB相都计数
极性修改:可以使用上方的函数进行,也可以硬件直接调换AB相引脚


三、固件库使用
1.开启GPIO和TIM的时钟
2.配置GPIO结构体,模式配置为上拉输入
3.不用配置内部时钟源,因为编码器托管了时钟,编码器接口就是带方向控制的外部时钟, 所以内部时钟就没有用了
4.配置时基单元,计数模式就不用配置了,取决于编码器的AB相边沿,ARR为65535-1, PSC = 1-1不分频
5.配置输入捕获单元(因为是由)TI1FP1和2接入到编码器接口的,所以捕获单元结构体 元素只需配置输入滤波和边沿检测即可,这里边沿检测给上升沿还是下降沿并不是说是
哪个有效,因为编码器模式下上/下沿都有效,这里指电平极性是否翻转,高电平不反转,
低电平翻转
6.TIM_EncoderInterfaceConfig();配置编码器,TIM_Cmd();使能定时器
7.使用中断读取Encoder的值(测速度)
若要测位置就直接读取Encoder的值即可,不需要中断

上拉输入还是下拉输入的选择
一般可以看一下接在这个引脚的外部模块输出的默认电平,如果外部模块空闲默认输出高电平,我们就选择上拉输入,默认输入高电平,如果外部模块默认输出低电平,我们配置下拉输入,默认输入低电平。总结,将需要配置电平的位置和外部模块保持默认状态一致,防止默认电平打架。
如果不确定外部模块输出的默认状态或者外部信号输出功率非常小,这时尽量选择浮空输入,浮空输入没有上下拉电阻去影响外部信号,缺点是当引脚悬空时,没有默认电平,输入就会受噪声干扰,来回不断跳变。
测位置:A、B相各出现了一个下降沿和上升沿,所以计次总共加了4次。
如果转到0,再往左转,0自减,计数器反向溢出,回到自动重装值,65535,然后继续往下减
解决方法是:如果我们想让0自减为-1,直接把uint16_t类型强制转换成int16_t即可


 文章来源:https://www.toymoban.com/news/detail-841417.html
文章来源:https://www.toymoban.com/news/detail-841417.html
如果想让编码器测速度,可以在固定的闸门时间读一次CNT,然后把CNT清零,此时CNT的值代表速度,单位是脉冲个数/S
(测频法)文章来源地址https://www.toymoban.com/news/detail-841417.html
#include "encoder.h"
void Encoder_Init(void)
{
//开启GPIO和TIM3时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//初始化GPIO
GPIO_InitTypeDef GPIO_InitStruct;//定义GPIO结构体
//GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;//输入不需要配置速度
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//因为编码器接口会托管时钟,编码器接口就是带方向控制的外部时钟,所以内部时钟就没有用了
//TIM_InternalClockConfig(TIM2);
//配置时基单元
//初始化时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_Prescaler = 1-1;//PSC-预分频器,给0,不分频
//TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//计数方向被编码器托管了
TIM_TimeBaseInitStruct.TIM_Period = 65535-1;//ARR寄存器-重装载寄存器
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;/*不分频----滤波器的采样频率,
可以由内部时钟直接提供,
也可以由内部时钟加一个时钟分频而来,
分频系数就是由TIM_ClockDivision决定*/
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;//重复计数器,只有高级定时器才有
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStruct);
//配置输入捕获单元
TIM_ICInitTypeDef TIM_ICInitStruct;
TIM_ICStructInit(&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;//电平极性选择,高电平极性不反
转,低电平极性反转
//TIM_ICInitStruct.TIM_ICSelection //直连or交叉连
//TIM_ICInitStruct.TIM_ICPrescaler //分频器因子,即每N个边沿跳变事件捕获一次-CCMR1_ICPS
TIM_ICInitStruct.TIM_ICFilter = 0xF;//CCMR1_ICF
TIM_ICInit(TIM3, &TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;//电平极性选择,高电平极性不反
转,低电平极性反转
TIM_ICInitStruct.TIM_ICFilter = 0xF;//CCMR1_ICF
TIM_ICInit(TIM3,&TIM_ICInitStruct);
TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);//这里的上升沿和上面结构体配置的效果一样,所以前面的可以删去
//使能TIM
TIM_Cmd(TIM3,ENABLE);
}
int16_t Encoder_Get(void)//int16_t 为了显示负数
{
int16_t temp;
temp = TIM_GetCounter(TIM3);
TIM_SetCounter(TIM3,0);//这里每次获得了编码器的值后就清零CNT是为了得到速度
//我们使用了中断,一秒进入一次然后读取CNT的值作为旋转速度
return temp;
}
#include "bsp_tim.h"
void Time_Config()
{
//开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
//选择时基单元的时钟-为内部时钟--定时器上电后默认是内部时钟,故不写这一个也行
TIM_InternalClockConfig(TIM2);
//初始化时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_Prescaler = 7200-1;//PSC-预分频器
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStruct.TIM_Period = 10000-1;//ARR寄存器-重装载寄存器
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;/*不分频----滤波器的采样频率,可以由内部时钟直接提供,
也可以由内部时钟加一个时钟分频而来,
分频系数就是由TIM_ClockDivision决定*/
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;//重复计数器,只有高级定时器才有
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
//使能中断-事件更新
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
TIM_ClearFlag(TIM2,TIM_IT_Update);//因为TIM_TimeBaseInit函数最后有一个直接操作UG位的操作
//使得直接产生了一个更新事件,因此直接进行给UIE位置1
//直接进入了中断,使得我们初始化ARR和PSC还未写入到
//影子寄存器,使得Num一上电就是1
//所以在进入中断之前先清楚中断标志位
//使能中断之后就要进入NVIC了
//先优先级分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
//配置结构体
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;//中断通道
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
//启动定时器
TIM_Cmd(TIM2,ENABLE);
//在_it文件里编写中断服务函数
}
#include ".\tim\bsp_tim.h"
#include "encoder.h"
#include ".\OLED\OLED.h"
int16_t speed;
int main()
{
Time_Config();
Encoder_Init();
OLED_Init();
while(1)
{
OLED_ShowSignedNum(1,5,speed,5);
}
}
void TIM2_IRQHandler()
{
//先获取中断标志位
if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET)
{
speed = Encoder_Get();
//清楚中断标志位
TIM_ClearFlag(TIM2,TIM_FLAG_Update);
}
}
到了这里,关于stm32-编码器测速的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!