车联网安全入门(IoV)
这篇文章主要介绍一些关于车辆网的概念、名词以及结构,具体的每一部分都会在之后进行详细的介绍以及学习
车联网系统:
telematics
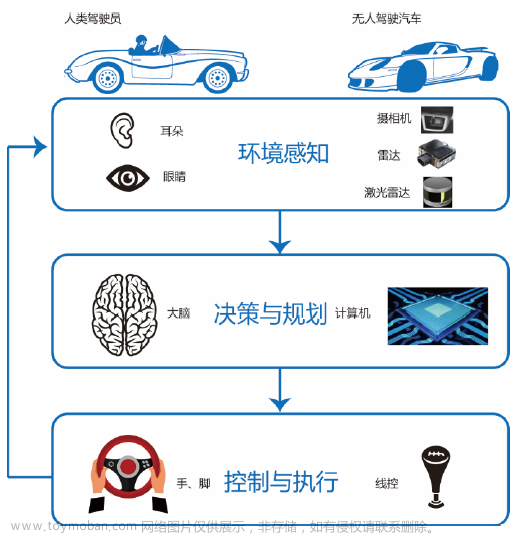
telematics是内置在汽车、航空、船舶、火车等运输工具上的计算机系统、无线通信技术、卫星导航装置等信息的互联网技术而提供信息的服务系统。简单地说就是通过无线网络将车接入互联网,为车主提供驾驶所必需的何种信息。
通常说的telematics就是指应用无线通信技术的车载电脑系统。telematics是无线通信技术、卫星导航技术、网络通信技术和车载电脑的综合产物。
T-BOX
T-BOX就是telematics box,远程通信终端,它一般是一个基于Android、linux操作系统的带通讯功能的盒子,内含一张SIM卡,汽车通过T-box连接到网络。
Telematics BOX,简称汽车T-BOX,即远程信息处理器,主要用于车与车联网服务平台之间通信,集成了OBD、MCU/CPU、FLASH、SENSOR、GPS、3G/4G、WiFi/蓝牙等模块。对内与车载 CAN 总线相连,实现指令和信息的传递;对外通过云平台与手机/PC 端实现互联,车内外信息交互的纽带其主要功能是为汽车提供网络连接
CAN&CAN协议
CAN是controller area network的缩写,即控制器局域网络。这是一种能够实现分布式实时控制的串行通信网络,它可以使用双绞线、光缆来传输信号,是世界上应用最广泛的现场总线之一。
传统的CAN是基于事件触发的,信息传输时间的不确定性和优先级反转是它固有的缺陷,当总线上传输消息密度较小时,这些缺陷对系统的实时性影响较小;但随着在总线上传输消息密度的增加,系统实时性能会急剧下降。为了满足汽车控制对实时性和传输消息密度不断增长的需要,改善CAN总线的实时性能非常必要。于是,传统CAN与时间触发机制相结合产生了TTCAN(Time-Triggered CAN),ISO11898-4己包含了TTCAN。 TTCAN总线和传统CAN总线系统的区别是:总线上不同的消息定义了不同的时间槽(Timer Slot)。
CAN总线工作原理
CAN总线使用串行数据传输方式,当CAN总线上的一个节点发送数据的时候,以报文形式广播给网络中所有的节点。对每一个节点来说,无论数据是否发给自己,都进行接收。每一组报文的开头11位字符为标识符,定义了报文的优先级。这个标识符是唯一的,所以在几个节点发生竞争时,标识符起到了重要的作用。
当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
CAN总线特征
- 在总线空闲时,所有单元都可以发送消息(多主控制),而两个以上的节点同时发送消息时,就根据标识符决定优先级
- 总线上的每一个节点都没有地址,所以在新加入一个节点时不需要进行额外的配置
- 通信速度较快,但是在同一网络中,所有节点必须设置为统一的通信速度,有任何一个节点的通信速度与其他节点不同都会造成信号错误。
- CAN信号传输通过差分电平进行传输,用两根线CAN_H和CAN_L的差值来标识逻辑信号
- 可以通过发送“遥控帧”请求其他节点发送数据
CAN协议帧
| 帧 | 帧用途 |
|---|---|
| 数据帧 | 用于发送节点向接收节点传送数据的帧 |
| 遥控帧 | 用于接收节点向具有相同ID的发送节点请求数据的帧 |
| 错误帧 | 用于当检测出错误时,向其他节点通知错误的帧 |
| 过载帧 | 用于接收节点通知其尚未做好接收准备的帧 |
| 帧间隔 | 用于将数据帧及遥控帧与前面的帧分离开的帧 |
数据帧与遥控帧的区别就是遥控帧没有数据段
OTA
OTA(over the air)技术,即空中下载技术,是通过移动通信的空中接口实现对移动终端设备以及SIM卡数据进行远程管理的技术。
OTA是一项基于短消息机制的远程更新、升级技术,终端可以通过OTA技术远程更新车端的软件,OAT技术可以通过2G/3G/4G/WIFI等移动通信网络对汽车上的零部件上固件、数据及软件进行远程管理。
OTA更新的步骤:首先将更新的软件打包发给OTA中心,然后OTA中心无线传输更新软件到车辆端,最后车端自动更新软件。
OTA分为两类:
- FOTA:是固件OTA,用来更新车端的固件如telematics-BOX,ECU等固件镜像
- SOTA:软件OTA,用来更新车端的娱乐软件比如地图、音乐等等
IVI
IVI(In-Vehicle Infotainment)即车载信息娱乐系统。该部分是车主可以直观接触到的部分比如中控的PAD、空调、音响等。
IVI中也有一个CAN芯片,用来向CAN总线发送特定指令来完成各种操作比如开关空调、查看里程、燃油等,现在的IVI更加单独化,只负责处理与用户直接交互的部分比如PAD和WIFI,至于运营商上网与下发指令等功能都交给telematics-BOX完成。
ECU
电控单元(ECU)是发动机的综合控制装置。它的功用是根据自身存储的程序对发动机各传感器输入的各种信息进行运算、处理、判断、然后输出指令,控制有关执行器动作,达到快速、准确、自动控制发动机工作的目的。
ECU根据不同的功能,区分为不同的类型,此处仅简介常见的ECU:
- 发动机管理系统(EMS):通过控制进气、喷油、点火实现发动机动力性、经济性、排放等性能的均衡,整车的扭矩解析功能集成在于EMS。
- 变速箱控制单元(TCU):通过电磁阀控制油压,实现离合器自动接合或者分离,在合适的时机完成档位切换,提高车辆的动力性、经济性、平顺性。
- BCM(Body Control Module)车身控制模块,主要控制车身电器,比如整车灯具、雨刮、洗涤、门锁、电动窗、天窗、电动后视镜、遥控等。
- 车身稳定控制(ESC):集成了TCS、ABS、ESC等功能,通过控制轮端制动力实现车辆的稳定行驶。
- 主动悬挂系统(MRC):控制电磁阀调节悬挂系统高度或阻尼,提高车辆行驶稳定性、舒适性。
可以将ECU简单理解为一个微机,实际上ECU内部就是存在一个单片。
DCU
DCU:域控
随着技术的进步,我们可以发现,越智能的汽车所装配的ECU越多,目前的高端车型和智能化程度高的车型中主要ECU的数量可能会高达上百个,而这些ECU之间也需要通过CAN总线连接和通信,这样增加了很大的复杂性。
域控架构就是将模块内的多个ECU功能集成到一个域控中,可以很大程度控制ECU数量,简化布线的复杂度。
典型的是分为动力总成,底盘控制,车身控制, ADAS, 娱乐系统这5个主要的domain,每个Domain有一个主要的高性能的ECU(这就是Domain Controller),负责处理Domain内的功能处理和转发,这样的高性能的ECU就是DCU域控。文章来源:https://www.toymoban.com/news/detail-842457.html
主要的domain,每个Domain有一个主要的高性能的ECU(这就是Domain Controller),负责处理Domain内的功能处理和转发,这样的高性能的ECU就是DCU域控。文章来源地址https://www.toymoban.com/news/detail-842457.html
到了这里,关于车联网安全入门的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!