本文使用PS-SPI实现Flash读写,PS-SPI的基础资料参考Xilinx UG1085的文档说明,其基础使用方法是,配置SPI模式,控制TXFIFO/RXFIFO,ZYNQ的IP自动完成发送TXFIFO数据,接收数据到RXFIFO,FIFO深度为128Byte。本文介绍了使用PS-SPI的Flash开发。
软硬件介绍:
- 硬件平台:Xilinx ZYNQ
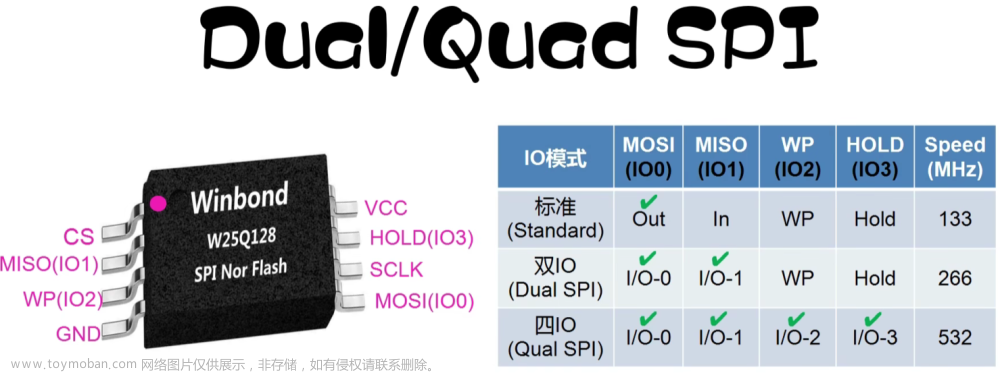
- Flash芯片:华邦W25Q80
- 软件平台:Vitis Standalone
芯片信息/配置:
- 容量:8Mbit
- SPI时钟:25MHZ
- IO电平:3.3V
- SPI FIFO深度:128Byte
- SPI 标准模式
方案:
在ZYNQ平台上使用PS的SPI进行读写Flash芯片,约束EMIO芯片管脚,在Vitis上读写SPI总线。
测试项目:
- 擦除、读、写功能
- 芯片容量
- 擦除、读、写速度
硬件设计
- 使能PS端的SPI(SPI0)模块,FIFO位宽8Bit
- 约束CS/DI/DO/CLK管脚
- 生成XSA,提供给软件
软件设计
- 使用PS SPI功能读写寄存器
- 封装读ID、写使能、读取状态、擦除、读、写接口(C语言)。
调试和测试流程
- 读取芯片ID,验证SPI通路
- 验证全片擦除、页写入、读功能
- 页写入、读功能, 验证数据读写正确性
- 容量测试
- 测试读写时间
调试手段
- 发送数据:写PS-SPI对应的写缓存地址,写入数据到“写FIFO缓冲区”,等待发送完成
- 读取数据:读PS-SPI对应的读缓存地址,读取“读FIFO缓冲区”数据,等待读取完成
- 信号分析:测试过程中使用逻辑分析仪抓取CS/DI/DO/CLK信号。
#define SPIPS_RECV_BYTE(BaseAddress) \
Xil_In8((BaseAddress) + XSPIPS_RXD_OFFSET)
#define SPIPS_SEND_BYTE(BaseAddress, Data) \
Xil_Out8((BaseAddress) + XSPIPS_TXD_OFFSET, (Data))
void spi_read(int byte_count)
{
int count;
u32 status_reg;
status_reg = XSpiPs_ReadReg(g_spi0_handle.Config.BaseAddress,
XSPIPS_SR_OFFSET);
/*
* Polling the Rx Buffer for Data
*/
do{
status_reg = XSpiPs_ReadReg(g_spi0_handle.Config.BaseAddress,
XSPIPS_SR_OFFSET);
}while(!(status_reg & XSPIPS_IXR_RXNEMPTY_MASK));
/*
* Reading the Rx Buffer
*/
for(count = 0; count < byte_count; count++){
g_read_buffer[count] = SPIPS_RECV_BYTE(
g_spi0_handle.Config.BaseAddress);
}
}
void spi_write(u8 *send_buffer, int byte_count)
{
u32 status_reg;
int trans_count = 0;
status_reg = XSpiPs_ReadReg(g_spi0_handle.Config.BaseAddress,
XSPIPS_SR_OFFSET);
while ((byte_count > 0) &&
(trans_count < XSPIPS_FIFO_DEPTH)) {
SPIPS_SEND_BYTE(g_spi0_handle.Config.BaseAddress,
*send_buffer);
send_buffer++;
++trans_count;
byte_count--;
}
/*
* Wait for the transfer to finish by polling Tx fifo status.
*/
do {
status_reg = XSpiPs_ReadReg(
g_spi0_handle.Config.BaseAddress,
XSPIPS_SR_OFFSET);
} while ((status_reg & XSPIPS_IXR_TXOW_MASK) == 0);
}代码:SPI读写接口

图:逻辑分析仪
1.读取芯片ID,验证SPI通路
- 写入"唤醒寄存器0xAB",后面再发送3个字节(数据0),共发送4个字节;再发送一个字节(为了提供时钟),读取FIFO数据5字节。
char release_powerdown_and_read_id()
{
memset(g_write_buffer, 0x00, sizeof(g_write_buffer));
g_write_buffer[0] = 0xAB;
//CS = 1
set_csn();
usleep(10);
//CS = 0
set_cs0();
spi_write(g_write_buffer,5);
set_csn();
spi_read(5);
return g_read_buffer[4];
}代码:读ID
注意的是,SPI只要有时钟,“读FIFO缓冲区”就会写入数据(MISO)。主机发送5个字节,接着读取5个字节,丢弃前4个数据,第5个就是读到的ID。 0xFF 0xFF 0xFF 0xFF 0x13

小结:读到的ID是0x13,和datasheet一致。
2.验证全片擦除
执行操作前,先配置写使能能为1,读取状态寄存器
全片擦除,写入"擦除全片寄存器0xC7"
等待BUSY信号为0时结束,判断信号间隔为1ms(参考官方驱动)
注意的是写完后,写时能标记为会置0
int wait_busy(int max_count)
{
int r,busy,busy_cnt = 0x00;
r = 0;
do {
busy = is_busy();
if(busy == 1)
usleep(1000);
busy_cnt += 1;
if (max_count > 0)
{
if (busy == 0)
{
r = 0;
break;
}
if (busy_cnt > max_count)
{
r = -1;
break;
}
}
} while(busy == 1);
return r;
}
void erase_entire()
{
set_write_enable();
g_write_buffer[0] = 0xC7;
set_csn();
usleep(10);
set_cs0();
spi_write(g_write_buffer,1);
set_csn();
spi_read(1);
wait_busy(1000);
return ;
}代码:擦除全片
----------------------------------------
...erase entire chip...
<erase> entire consume time:831 ms
----------------------------------------

小结:全片擦除用了0.8S,比手册提供的2S典型值小。
3.页写入、读功能, 验证数据读写正确性
页读取
写入"读页数据寄存器0x03",后面跟一个24位地址,按照手册要求先发送高位地址,即依次发送addr[23:16],addr[15:8],addr[7:0]。主机还要继续写入提供时钟,写入一个页的数据(0)。读取“读FIFO缓冲区”数据,读取一个页的数据量,得到读取内容。
void page_read(int address, unsigned char * recv, int size)
{
int i;
set_csn();
usleep(10);
set_cs0();
g_write_buffer[0] = 0x03;
g_write_buffer[1] = address >> 16;
g_write_buffer[2] = address >> 8;
g_write_buffer[3] = address >> 0;
spi_write(g_write_buffer,4);
spi_read(4);
g_write_buffer[0] = 0;
memset(g_write_buffer, 0x00, sizeof(g_write_buffer));
if (size > 128)
{
spi_write(g_write_buffer,128);
spi_read(128);
memcpy(recv, g_read_buffer, 128);
spi_write(g_write_buffer + 128,size - 128);
spi_read(size - 128);
memcpy(recv + 128, g_read_buffer, size - 128);
}
else
{
spi_write(g_write_buffer, size);
spi_read(size);
memcpy(recv, g_read_buffer, size);
}
set_csn();
return;
}代码:页读取

页写入
写入"写页数据寄存器0x02",后面跟一个24位地址,按照手册要求先发送高位地址,即依次发送addr[23:16],addr[15:8],addr[7:0]。主机继续写入一个页的数据,页数据Pattern是一个递增数据。
//Pattern
u8 data[] = {0x00,0x01,0x02....0x0FF};读取“读FIFO缓冲区”数据,排空无用“读缓冲数据”。
void page_write(int address, unsigned char * data, int size)
{
//int i;
set_write_enable();
set_csn();
usleep(10);
set_cs0();
g_write_buffer[0] = 0x02;
g_write_buffer[1] = address >> 16;
g_write_buffer[2] = address >> 8;
g_write_buffer[3] = address >> 0;
spi_write(g_write_buffer,4);
spi_read(4);
if (size > 128)
{
spi_write(data,128);
spi_read(128);
spi_write(data + 128,size - 128);
spi_read(size - 128);
}
else
{
spi_write(data,size);
spi_read(size);
}
wait_busy(1000);
set_csn();
return;
}
代码:页写入

验证
- 执行“擦除”操作
- 执行“页写入”操作
- 执行“页读取”操作
- 打印读取数据,比较写入数据和读取数据内容,使用memcmp进行比较。
void page_rw_test()
{
char send_data[PAGE_SIZE] = {...};//自行填充
char recv_data[PAGE_SIZE];
erase_entire();
page_write(0x00, send_data, PAGE_SIZE);
page_read(0x00, recv_data, PAGE_SIZE);
r = memcmp(send_data, recv_data, PAGE_SIZE);
return r;
}代码:页读写验证
小结:读写功能正常,数据比较一致。
4.容量测试
方法:每4个字节当作一个单元,每个单元数据递增1。写入再读出作比较。
芯片共有16x16x16个4K个页,往4K个页写入递增数据(0,262143)。打印部分页内容,对比所有写入数据和读取数据,使用memcmp进行比较。
表:地址和容量地址
| byte_address | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | .. | .. | .. | .. | 8388604 | 8388605 | 8388606 | 8388607 | |
| vol_address | 0 | 1 | ........ | 262143 | |||||||||||||
| data | 0 | 1 | ........ | 262143 | |||||||||||||
小结:打印内容符合递增预期,数据比较一致。
5.测试读写时间
容量测试加入时间打印,分别记录擦除时间、写入时间和读取时间。
时间计数方式,采用读取CPU计数器计数,转换成时间。
write_data/read_data是page_write/page_read的封装,可以写入/读取任意数据。
int entire_volume_test(const int value_start, int step)
{
int blkn, r, value, i,last_value;
int escape;
XTime start,end;
blkn = BLOCK_NUMBER;
printf("[ entire volume test ]\r\n");
printf("[information]:\r\n");
printf("----------------------------------------\r\n");
printf(" Capicity( Bit ):%d\r\n", blkn * BLOCK_SIZE * 8);
printf(" Capicity(1Byte):%d\r\n", blkn * BLOCK_SIZE);
printf(" Capicity(4Byte):%d [*]\r\n", blkn * BLOCK_SIZE/4);
printf(" SPI CLK :%d MHZ\r\n", 25);
printf("----------------------------------------\r\n");
printf("[test parttern] value start:%d,step:%d\n", value_start, step);
printf("[test parttern] value range:(%d , %d)\n", value_start, step * (blkn * BLOCK_SIZE/4 - 1));
printf("----------------------------------------\r\n");
printf("...erase entire chip...\r\n");
start = get_sys_count();
erase_entire();
end = get_sys_count();
escape = get_useconds(start, end);
printf("<erase> entire consume time:%02d ms \r\n", escape/1000);
usleep(200000);
last_value = step * (blkn * BLOCK_SIZE/4 - 1);
printf(" fill data\r\n");
value = value_start;
for (i = 0; i < blkn * BLOCK_SIZE/4; i++)
{
g_data[i * 4 + 3 ] = (value >> 24) & 0xFF;
g_data[i * 4 + 2 ] = (value >> 16) & 0xFF;
g_data[i * 4 + 1 ] = (value >> 8) & 0xFF;
g_data[i * 4 + 0 ] = (value >> 0) & 0xFF;
value += step;
}
printf(" write data sequence\r\n");
start = get_sys_count();
write_data(0, g_data, blkn * BLOCK_SIZE);
end = get_sys_count();
escape = get_useconds(start, end);
printf("<write> data consume time:%02d ms \r\n", escape/1000);
printf(" reading.....\r\n");
start = get_sys_count();
read_data (0, g_recv_buffer,blkn * BLOCK_SIZE);
end = get_sys_count();
escape = get_useconds(start, end);
printf("<read> consume time:%02d ms \r\n", escape/1000);
printf(" dump last 2 page \r\n");
printf("value will range:(%08d , %08d)\r\n", 1 + last_value - 2 * PAGE_SIZE/ 4, last_value - 1 * PAGE_SIZE/ 4);
dec_print(g_recv_buffer + (blkn * BLOCK_SIZE - 2 * PAGE_SIZE) , PAGE_SIZE/4);
printf("value will range:(%08d , %08d)\r\n", 1 + last_value - 1 * PAGE_SIZE/ 4, last_value - 0 * PAGE_SIZE/ 4);
dec_print(g_recv_buffer + (blkn * BLOCK_SIZE - 1 * PAGE_SIZE) , PAGE_SIZE/4);
printf("compare <write data> and <read data> values, compare size:%d Bytes\n", blkn * BLOCK_SIZE);
printf("----------------------------------------\r\n");
if (memcmp(g_data, g_recv_buffer, blkn * BLOCK_SIZE) == 0)
{
printf(" [*] <pass> volume test !!!\r\n");
printf("----------------------------------------\r\n");
return 0;
}
printf("[*] !!<fail> volume test !!!\r\n");
printf("----------------------------------------\r\n");
return -1;
}代码:容量测试
<write> page data consume time:1346 us
<read> page data consume time:275 us
...erase entire chip...
<erase> entire consume time:831 ms
fill data
write data sequence
<write> data consume time:5509 ms
reading.....
<read> consume time:1127 ms
----------------------------------------
[*] <pass> volume test !!!
----------------------------------------
记录测试结果到下表
| 测试项目 | 测试值(ms) | 参考值[典型值,最大值](ms) |
| 页写入时间 | 1.34 | [0.8, 3] |
| 页读取时间 | 0.28 | / |
| 全片擦除时间 | 831 | [2000, 6000] |
| 全片写入时间 | 5509 | [3276,24576] |
| 全片读取时间 | 1127 | / |
表:测试结果
总结:擦除速度比datasheet参考值快,其他均正常。
其他相关
Flash读写特性
Flash的特性是,写数据只能将1写为0,0不能写为1。擦除数据是将所有数据都写为1。因此如果想在已经数据的flash上写入新的数据,则必须先擦除。
Flash相关知识学习记录(以W25Q128为例)
芯片地址相关
以WQ25Q80为例,一个地址24位,由块地址、扇地址、页地址、页内偏移组成。
#define ADDRESS(block, sector, page, offset) ((block) << 16 | (sector) << 12 | (page) << 8 | (offset))代码:使用C语言表示芯片地址
| 地址项 | 块地址 | 扇区地址 | 页地址 | 页内偏移 |
| 地址大小(bit) | 4(冗余)+4 | 4 | 4 | 8 |
表:WQ25Q80地址
比如一个地址0x04E3AA,表示块地址0x04,扇区地址0xE,页地址0x03,页内偏移0xAA。
关于CS使用
使用芯片时候需要把CS引脚拉低,在命令写完成后需要把CS引脚拉高。手册里都会有"The instruction is completed by driving /CS high"的说明,这也成为Flash芯片操作的通用操作。

关于PS-SPI软件配置
可以配置CS控制模式、时钟频率,时钟频率通过SPI主频分频得到,分频系数可配置。
int spi_init() {
unsigned int config_value;
int status;
char spi_dev_id = SPI_DEVICE_ID;
XSpiPs_Config *spi_config;
/*
* Initialize the SPI device.
*/
spi_config = XSpiPs_LookupConfig(spi_dev_id);
if (NULL == spi_config) {
return XST_FAILURE;
}
status = XSpiPs_CfgInitialize(&g_spi_handle, spi_config, spi_config->BaseAddress);
if (status != XST_SUCCESS) {
return XST_FAILURE;
}
/*
* Perform a self-test to check hardware build.
*/
status = XSpiPs_SelfTest(&g_spi_handle);
if (status != XST_SUCCESS) {
return XST_FAILURE;
}
XSpiPs_ResetHw(spi_config->BaseAddress);
printf("%s self test succ\r\n", __func__);
status = XSpiPs_SetOptions(&g_spi_handle, XSPIPS_MASTER_OPTION | XSPIPS_FORCE_SSELECT_OPTION);
//status = XSpiPs_SetOptions(&g_spi_handle, XSPIPS_MASTER_OPTION);
if (status != XST_SUCCESS) {
printf("%s XSpiPs_SetOptions fail\n", __func__);
return XST_FAILURE;
}
/*
* PS SPI CLK DOMAIN 200MHZ
* */
status = XSpiPs_SetClkPrescaler(&g_spi_handle, XSPIPS_CLK_PRESCALE_8);
if (status != XST_SUCCESS) {
printf("%s XSpiPs_SetClkPrescaler fail\n", __func__);
return XST_FAILURE;
}
XSpiPs_Enable(&g_spi_handle);
printf("spi <%d> config finish\r\n", spi_dev_id);
//config_value =
XSpiPs_ReadReg(g_spi_handle.Config.BaseAddress,XSPIPS_CR_OFFSET);
//printf("config_value :0x%08X\n", config_value);
return XST_SUCCESS;
}
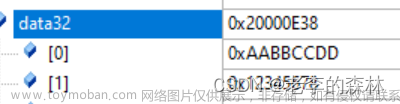
关于发送间隔设置
我在测试多路SPI的时候,发现同型号芯片读写时间差别大,测试时钟SCLK,表现上间隔不一致。查阅寄存器表后发现,“发送间隔”配置不一致。
“发送间隔”修改成一致后,测试读写时间一致。
 文章来源:https://www.toymoban.com/news/detail-842644.html
文章来源:https://www.toymoban.com/news/detail-842644.html
图:SPI控制器寄存器列表文章来源地址https://www.toymoban.com/news/detail-842644.html
到了这里,关于基于ZYNQ PS-SPI的Flash驱动开发的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!