目录
K210-UART串口通信相关函数:
使用K210串口的时候需要映射引脚:
K210与STM32串口通信
发送单字节:
K210端
STM32端
发送数据包
K210端
STM32端
K210的UART模块支持全双工通信,可以同时进行数据的发送和接收。在K210上使用UART串口通信,你可以连接外部设备,如传感器、显示器、WiFi模块等,实现数据的交换和控制。
K210-UART串口通信相关函数:
1.machine.UART():该函数用于初始化一个UART串口对象。你可以指定串口的编号(如UART1)、波特率、数据位、校验位、停止位、TX引脚和RX引脚等参数。
import machine
# 初始化串口
uart = machine.UART(1, baudrate=115200, tx=12, rx=13)在这个示例中,我们使用machine.UART()函数初始化了一个串口对象,指定了串口的编号(1)、波特率(115200)、TX引脚(12)和RX引脚(13)。
或者可以:
machine.UART(uart,baudrate,bits,parity,stop,timeout, read_buf_len)
machine.UART()函数是用于初始化一个UART串口对象的函数,它可以接受以下参数:
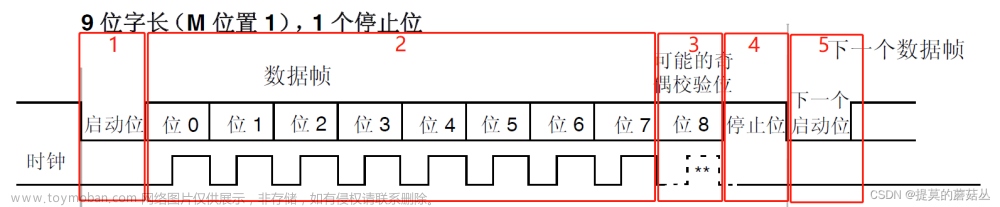
uart:串口编号,可以为1、2、3。baudrate:波特率,用于指定串口通信的数据传输速率。bits:数据位数,可以为5、6、7、8。parity:校验位,可以为None、0、1、2。stop:停止位,可以为1、2。timeout:超时时间,单位为毫秒。read_buf_len:读缓冲区长度,用于指定串口读取数据时的缓冲区大小。其中,
uart参数是必需的,其他参数都有默认值。下面分别介绍这些参数的含义和用法:
uart:串口编号,可以为1、2、3。如果你的开发板上有多个串口,需要指定使用哪个串口进行通信。baudrate:波特率,用于指定串口通信的数据传输速率。常见的波特率有9600、115200等,需要根据实际情况进行设置。bits:数据位数,可以为5、6、7、8。一般情况下使用8位数据位即可。parity:校验位,可以为None、0、1、2。校验位用于检查数据传输中是否出现错误,一般情况下可以设置为None。stop:停止位,可以为1、2。停止位用于指定每个数据帧的结束位置,一般情况下使用1个停止位即可。timeout:超时时间,单位为毫秒。当读取串口数据时,如果在超时时间内没有读取到任何数据,则会返回None。read_buf_len:读缓冲区长度,用于指定串口读取数据时的缓冲区大小。如果读取的数据量较大,可以适当增大该值,以避免数据丢失。
2.uart.write():该函数用于向串口发送数据。你可以发送字符串或者字节数据。
# 发送数据
uart.write('Hello, UART!')3.uart.read():该函数用于从串口接收数据。它会阻塞程序直到接收到指定数量的数据或者超时
# 接收数据
data = uart.read(10)
print(data)这段代码从串口读取最多10个字节的数据,并将其打印出来。
4.uart.any():该函数用于检查串口是否有未读取的数据。如果有,返回值为True;否则返回False。
# 检查是否有未读取的数据
if uart.any():
data = uart.read()
print(data)这段代码首先调用
uart.any()函数检查串口是否有未读取的数据,如果有,则调用uart.read()函数将数据读取并打印出来。
5.uart.flush():该函数用于清空串口的缓冲区,将所有未读取的数据丢弃
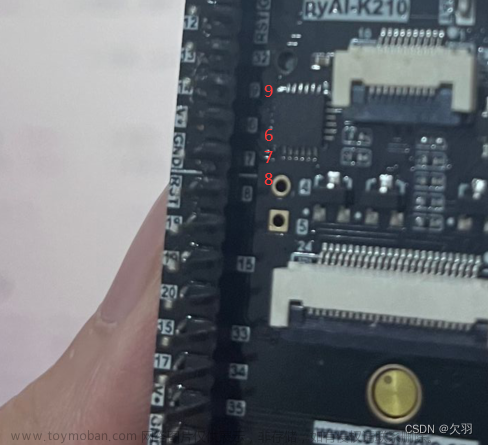
使用K210串口的时候需要映射引脚:
# IO6→RX1,IO7→TX1
fm.register(6, fm.fpioa.UART1_RX, force=True)
fm.register(7, fm.fpioa.UART1_TX, force=True)
fm.register()函数是用于配置FPIOA(Flexible Peripheral I/O Assignments)的函数,它可以将指定的引脚与相应的功能进行绑定。
K210与STM32串口通信
K210与STM32串口通信发送分为两种:一种是发送单字节,一种是发送数据包。因为发送的数据不一样,从而K210的代码和STM32的代码都是不一样的。
本篇文章只涉及K210发送给STM32。
发送单字节:
K210端
from machine import UART, Timer
from fpioa_manager import fm
#映射串口引脚
fm.register(6, fm.fpioa.UART1_RX, force=True)
fm.register(7, fm.fpioa.UART1_TX, force=True)
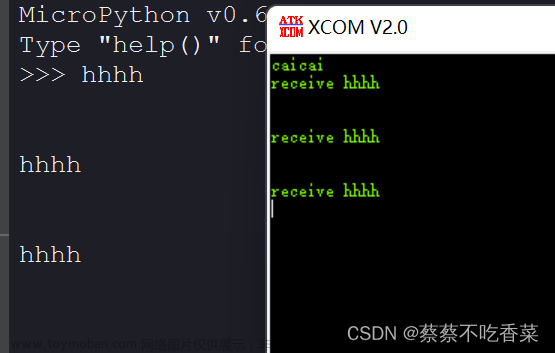
while True:
text=uart.read() #读取数据
if text: #如果读取到了数据
uart.write('1')
STM32端
void Usart3_Init(unsigned int baud)
{
GPIO_InitTypeDef gpio_initstruct;
USART_InitTypeDef usart_initstruct;
NVIC_InitTypeDef nvic_initstruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
//PA2 TXD
gpio_initstruct.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_initstruct.GPIO_Pin = GPIO_Pin_10;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio_initstruct);
//PA3 RXD
gpio_initstruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_initstruct.GPIO_Pin = GPIO_Pin_11;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio_initstruct);
usart_initstruct.USART_BaudRate = baud;
usart_initstruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usart_initstruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usart_initstruct.USART_Parity = USART_Parity_No;
usart_initstruct.USART_StopBits = USART_StopBits_1;
usart_initstruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART3, &usart_initstruct);
USART_Cmd(USART3, ENABLE);
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
nvic_initstruct.NVIC_IRQChannel = USART2_IRQn;
nvic_initstruct.NVIC_IRQChannelCmd = ENABLE;
nvic_initstruct.NVIC_IRQChannelPreemptionPriority = 0;
nvic_initstruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&nvic_initstruct);
}
if(USART_ReceiveData(USART3)=='1')//K210
{
numbert++;
}
发送数据包
K210端
def str_int(data_str):
bb = binascii.hexlify(data_str)
bb = str(bb)[2:-1]
#print(bb)
#print(type(bb))
hex_1 = int(bb[0])*16
hex_2 = int(bb[1],16)
return hex_1+hex_2
def send_data(x,y,w,h,msg):
start = 0x24
end = 0x23
length = 5
class_num = 0x05 #例程编号
class_group = 0xBB #例程组
data_num = 0x00 #数据量
fenge = 0x2c #逗号
crc = 0 #校验位
data = [] #数据组
#参数都为0
if x==0 and y==0 and w==0 and h ==0:
pass
else:
#x(小端模式)
low = x & 0xFF #低位
high = x >> 8& 0xFF #高位
data.append(low)
data.append(fenge) #增加","
data.append(high)
data.append(fenge) #增加","
#y(小端模式)
low = y & 0xFF #低位
high = y >> 8& 0xFF #高位
data.append(low)
data.append(fenge) #增加","
data.append(high)
data.append(fenge) #增加","
#w(小端模式)
low = w & 0xFF #低位
high = w >> 8& 0xFF #高位
data.append(low)
data.append(fenge) #增加","
data.append(high)
data.append(fenge) #增加","
#h(小端模式)
low = h & 0xFF #低位
high = h >> 8& 0xFF #高位
data.append(low)
data.append(fenge) #增加","
data.append(high)
data.append(fenge) #增加","
if msg !=None:
#msg
for i in range(len(msg)):
hec = str_int(msg[i])
data.append(hec)
data.append(fenge) #增加","
#print(data)
data_num = len(data)
length += len(data)
#print(length)
send_merr = [length,class_num,class_group,data_num]
for i in range(data_num):
send_merr.append(data[i])
#print(send_merr)
#不加上CRC位,进行CRC运算
for i in range(len(send_merr)):
crc +=send_merr[i]
crc = crc%256
send_merr.insert(0,start) #插入头部
send_merr.append(crc)
send_merr.append(end)
#print(send_merr)
global send_buf
send_buf = send_merr首先是
str_int函数,它的作用是将输入的字符串转换为整数。具体实现上,它使用了 Python 的标准库中的binascii.hexlify方法将输入的字符串data_str转换为十六进制表示的字节串,然后对于每一个字节,分别将其高四位和低四位转换成十进制数,并进行一定的运算,最终返回一个整数。接下来是
send_data函数,它的作用是组装一个特定格式的数据包。函数接受五个参数 x, y, w, h, msg,其中 x, y, w, h 是四个整数,msg 是一个字符串。根据这些参数,函数构建了一个包含起始标识、长度、例程编号、例程组、数据量、数据内容以及校验位的数据包。在函数内部,首先定义了一些常量,如起始标识、结束标识、长度、例程编号、例程组等。然后根据传入的参数判断是否需要加入 x, y, w, h 这四个整数。如果这四个整数全部为 0,那么就不将它们加入数据包中,否则将它们按照小端模式(即低位在前、高位在后的顺序)加入到数据中。接下来是对传入的字符串 msg 进行处理,将其中每个字符转换为整数后加入数据中。
接着计算数据量和长度,并将所有数据组装成一个列表
send_merr。最后,计算校验位并将其加入到send_merr中,同时在开头和结尾分别加上起始标识和结束标识,最终得到一个完整的数据包。
STM32端
char buf_msg[100] = {'\0'};
u8 new_flag = 0;
u8 r_index = 0;
u16 buf_crc = 0;
u8 tou_flag = 0;
u8 len_flag = 0;
u8 buf_len = 0;
char data[50];
void recv_k210msg(uint8_t recv_msg)
{
if (recv_msg == '$')
{
new_flag = 1;
}
if (recv_msg == '#')
{
if (buf_len == r_index)
{
new_flag = 0;
tou_flag = 0;
len_flag = 0;
buf_crc -= buf_msg[r_index - 1];
buf_crc %= 256;
if (buf_crc == buf_msg[r_index - 1])
{
deal_recvmsg();
}
else
{
r_index = 0;
buf_crc = 0;
}
}
}
if (new_flag == 1)
{
if (recv_msg == '$' && tou_flag == 0)
{
tou_flag = 1;
}
else
{
buf_msg[r_index++] = recv_msg;
buf_crc += recv_msg;
if (len_flag == 0)
{
buf_len = buf_msg[0];
len_flag = 1;
}
}
}
}
void deal_recvmsg(void)
{
u8 index, data_i = 0;
u8 eg_num = buf_msg[1];
u8 number = buf_msg[3];
u8 i_duo = 0;
if (r_index != buf_len)
{
buf_len = 0;
return;
}
for (index = 0; index < number; index++)
{
if (buf_msg[4 + index] == 0x2c && i_duo == 0)
{
i_duo = 1;
continue;
}
data[data_i++] = buf_msg[4 + index];
i_duo = 0;
}
buf_crc = 0;
r_index = 0;
memset(buf_msg, 0, sizeof(buf_msg));
deal_data(eg_num);
}
void deal_data(u8 egnum)
{
u16 x, y, w, h;
u8 msg[20] = {'\0'};
u8 icopy = 0;
u16 id = 999;
switch (egnum)
{
case 1:
case 5:
case 6:
x = data[1] << 8 | data[0];
y = data[3] << 8 | data[2];
w = data[5] << 8 | data[4];
h = data[7] << 8 | data[6];
break;
case 2:
case 3:
x = data[1] << 8 | data[0];
y = data[3] << 8 | data[2];
w = data[5] << 8 | data[4];
h = data[7] << 8 | data[6];
while (*(data + 8 + icopy) != '\0')
{
msg[icopy] = *(data + 8 + icopy);
icopy++;
}
break;
case 4:
x = data[1] << 8 | data[0];
y = data[3] << 8 | data[2];
w = data[5] << 8 | data[4];
h = data[7] << 8 | data[6];
id = data[8] << 8 | data[9];
while (*(data + 10 + icopy) != '\0')
{
msg[icopy] = *(data + 10 + icopy);
icopy++;
}
break;
case 7:
case 8:
x = data[1] << 8 | data[0];
y = data[3] << 8 | data[2];
w = data[5] << 8 | data[4];
h = data[7] << 8 | data[6];
id = data[8];
break;
case 9:
x = data[1] << 8 | data[0];
y = data[3] << 8 | data[2];
w = data[5] << 8 | data[4];
h = data[7] << 8 | data[6];
while (*(data + 8 + icopy) != '\0')
{
msg[icopy] = *(data + 8 + icopy);
icopy++;
}
break;
case 10:
case 11:
id = data[0];
break;
}
k210_msg.class_n = egnum;
k210_msg.x = x;
k210_msg.y = y;
k210_msg.w = w;
k210_msg.h = h;
k210_msg.id = id;
strcpy((char*)k210_msg.msg_msg, (char*)msg);
memset(data, 0, sizeof(data));
}
void USART2_IRQHandler(void)
{
uint8_t Rx2_Temp;
if (USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
Rx2_Temp = USART_ReceiveData(USART2);
recv_k210msg(Rx2_Temp);
}
}
recv_k210msg函数用于接收 K210 模块传来的消息,并根据特定的起始符号$和结束符号#进行消息解析。具体流程如下:
- 当接收到
$符号时,表示开始接收新的消息,将new_flag置为 1。- 当接收到
#符号时,表示消息接收完毕,进行消息处理。如果消息长度符合要求,计算消息校验和并调用deal_recvmsg进行处理。- 在接收到其他字符时,如果处于接收新消息状态,将字符存入缓冲区
buf_msg中,并更新校验和buf_crc。
deal_recvmsg函数用于对接收到的消息进行处理,主要是根据消息类型和内容进行解析,并调用deal_data函数进行进一步处理。具体流程如下:
- 根据消息中指定的格式提取数据,并调用
deal_data函数进行处理。- 处理完成后,清空缓冲区
buf_msg和相关标志位,以便接收下一条消息。
deal_data函数用于根据不同类型的消息对数据进行解析和处理。具体流程如下:文章来源:https://www.toymoban.com/news/detail-842662.html
- 根据消息的类型进行不同的数据解析操作,提取出消息中的有用信息,并赋值给
k210_msg结构体。- 结构体
k210_msg包含了消息的分类、位置信息、ID 信息以及消息内容。- 处理完成后,清空数据缓冲区
data。
有读者看到这里可能会想问,能不能用单字节的方式发送字符串,STM32中USART_ReceiveData(USART3)=='1'此处没法等于字符串。文章来源地址https://www.toymoban.com/news/detail-842662.html
到了这里,关于K210 UART串口通信介绍与 STM32通信的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!