一、

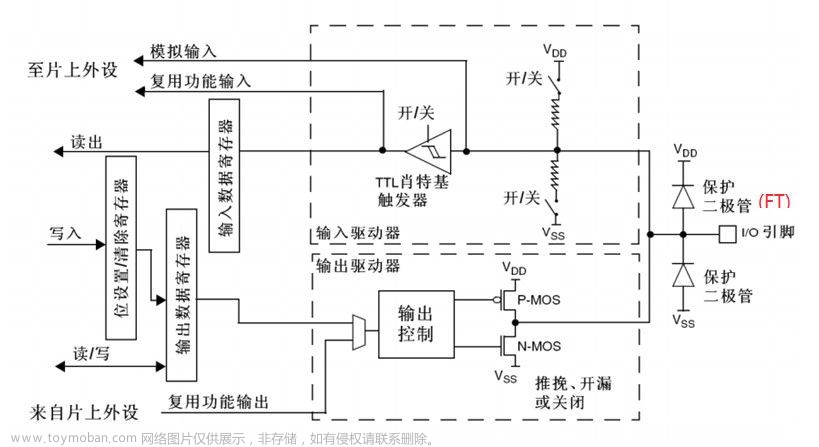
图3
N1为可变电阻,阻值可根据环境的光线温度等进行变化,C2是滤波电容,给中间电压输出进行滤波,用来滤出一些干扰保持电压波形稳定。
当N1阻值变小时,下拉作用会增强,中间的AO端电压会拉低。极端情况下,N1阻值为0,AO输出被完全下拉,输出0V;当N1阻值变大,下拉作用减弱,中间的引脚由于R1的上拉作用,电压会升高;极端情况下,N1阻值无穷大相当于断路,输出电压被R1拉高至VCC。
二、硬件电路

1、按键按下PAO下拉到GND,PAO口读取低电平。(PAO悬空会出现引脚电压不确定)
PAO为上拉输入模式,引脚悬空,PAO为高电平。
上面两种接法按键按下时为低电平(采用上拉)
下面面两种接法按键按下时为高电平(采用下拉)
左边两种接法必须为上拉或下拉模式,右边两种接法可为悬空状态。
三、C语言数据类型

注意stm32中int占32位,如果要用16位数据,要用short表示。
C语言宏定义
关键字:#define
用途:用一个字符串代替一个数字,便于理解,防止出错;提取程序中经常出现的参数,便于快速修改
定义宏定义:
#define ABC 12345
引用宏定义:
int a = ABC; //等效于int a = 12345;
C语言typedef
关键字:typedef
用途:将一个比较长的变量类型名换个名字,便于使用
定义typedef:typedef unsigned char uint8_t;
引用typedef:uint8_t a; //等效于unsigned char a;
C语言结构体

C语言枚举
关键字:enum
用途:定义一个取值受限制的整型变量,用于限制变量取值范围;宏定义的集合。
•定义枚举变量:enum{FALSE = 0, TRUE = 1} EnumName;
因为枚举变量类型较长,所以通常用typedef更改变量类型名。
•引用枚举成员:
EnumName = FALSE;
EnumName = TRUE;
代码
LED闪烁
#include "stm32f10x.h" // Device header #include "Delay.h"
int main(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
while (1)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
Delay_ms(500);
GPIO_SetBits(GPIOA, GPIO_Pin_0);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)0);
Delay_ms(500);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)1);
Delay_ms(500);
}
}
LED流水灯
#include "stm32f10x.h" // Device header #include "Delay.h"
int main(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
while (1)
{
GPIO_Write(GPIOA, ~0x0001); //0000 0000 0000 0001
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0002); //0000 0000 0000 0010
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0004); //0000 0000 0000 0100
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0008); //0000 0000 0000 1000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0010); //0000 0000 0001 0000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0020); //0000 0000 0010 0000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0040); //0000 0000 0100 0000
Delay_ms(100);
GPIO_Write(GPIOA, ~0x0080); //0000 0000 1000 0000
Delay_ms(100);
}
}
蜂鸣器
#include "stm32f10x.h" // Device header #include "Delay.h"
int main(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
while (1)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
Delay_ms(100);
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
Delay_ms(700);
}
}
按键控制LED
#include "stm32f10x.h" // Device header #include "Delay.h" #include "LED.h" #include "Key.h"
uint8_t KeyNum;
int main(void) { LED_Init(); Key_Init();
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
LED1_Turn();
}
if (KeyNum == 2)
{
LED2_Turn();
}
}
}
光敏传感器控制蜂鸣器
#include "stm32f10x.h" // Device header #include "Delay.h" #include "Buzzer.h" #include "LightSensor.h"
int main(void) { Buzzer_Init(); LightSensor_Init();文章来源:https://www.toymoban.com/news/detail-844098.html
while (1)
{
if (LightSensor_Get() == 1)
{
Buzzer_ON();
}
else
{
Buzzer_OFF();
}
}
}文章来源地址https://www.toymoban.com/news/detail-844098.html
到了这里,关于江科大STM32-3-3,3-4的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!