实现目标
1、STM32 基于HAL库定时器的使用;
2、加强数码管的学习。
3、具体目标:利用定时器3实现一个60秒的定时,定时时间在数码管上显示,定时时间到,蜂鸣器响一声作为提示功能。
一、STM32 定时器的中断回调函数
自动生成的代码中,中断回调函数都有一个__weak 关键字,加上了__weak 修饰符的函数,用户可以在用户文件中重新定义一个同名函数,最终编译器编译的时候,会选择用户定义的函数,如果用户没有重新定义这个函数,那么编译器就会执行__weak 声明的函数,并且编译器不会报错。所以我们可以在别的地方定义一个相同名字的函数,而不必也尽量不要修改之前的函数。
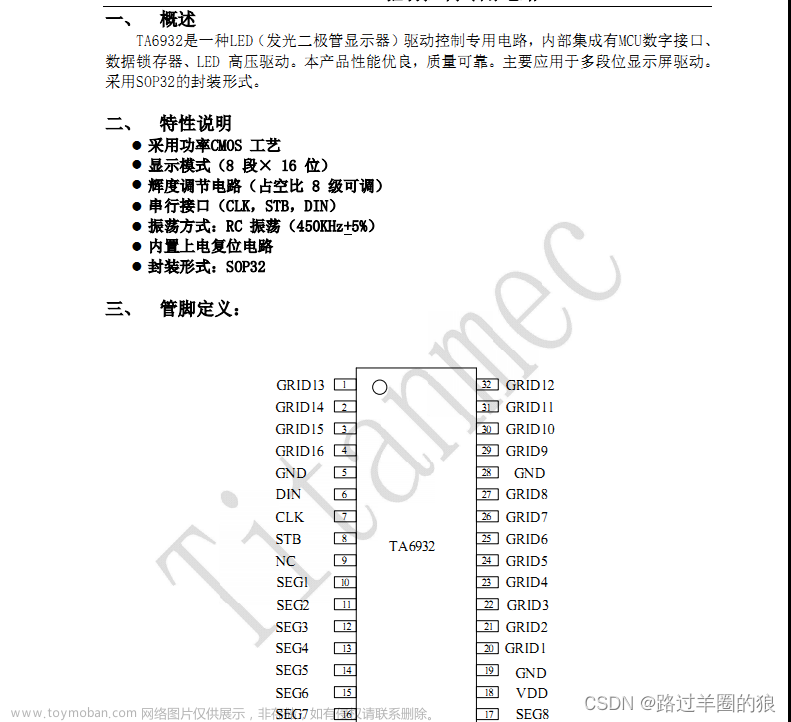
二、原理图设计


三、STM32CubeMX 配置
1.定时器时钟配置

2.定时器3、数码管、蜂鸣器的配置


3.开启定时器3中断

四、程序设计
1.变量定义及函数声明
//共阳数码管码表
char table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
int s ,flag;
void HC595_Send_Byte(unsigned char byte);
void for_delay_us(uint32_t nus);2.打开定时器3中断
开启定时中断函数: HAL_TIM_Base_Start_IT(&htimx); //x 为要开启的定时器号,下面代码为开启定时器2中断,x= 3
HAL_TIM_Base_Start_IT(&htim3);//开启定时器3中断3.重写中断回调函数
中断回调函数内尽量少放我们处理的代码。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == htim3.Instance) //1S进入1次中断
{
s++;//秒 ++
if ( s >= 60)//1s 到
{
s = 0;
flag = 1;
}
}
}4.74HC595驱动程序、自写延时函数
void HC595_Send_Byte(unsigned char byte)
{
unsigned char i;
for (i = 0; i < 8; i ++) //一个字节8位,传输8次,一次一位,循环8次,刚好移完8位
{
/**** 步骤1:将数据传到DS引脚 ****/
if (byte & 0x80) //先传输高位,通过与运算判断第八是否为1
HAL_GPIO_WritePin(GPIOA, DATA_Pin, GPIO_PIN_SET); //如果第八位是1,则与 595 DS连接的引脚输出高电平
else //否则输出低电平
HAL_GPIO_WritePin(GPIOA, DATA_Pin, GPIO_PIN_RESET);
/*** 步骤2:SHCP每产生一个上升沿,当前的bit就被送入移位寄存器 ***/
HAL_GPIO_WritePin(GPIOA, SHCP_Pin, GPIO_PIN_RESET); // SHCP拉低
for_delay_us(5); // 适当延时
HAL_GPIO_WritePin(GPIOA, SHCP_Pin, GPIO_PIN_SET); // SHCP拉高, SHCP产生上升沿
for_delay_us(5);
byte <<= 1; // 左移一位,将低位往高位移,通过 if (byte & 0x80)判断低位是否为1
}
/** 步骤3:STCP产生一个上升沿,移位寄存器的数据移入存储寄存器 **/
HAL_GPIO_WritePin(STCP_GPIO_Port, STCP_Pin, GPIO_PIN_RESET); // 将STCP拉低
for_delay_us(5);
HAL_GPIO_WritePin(STCP_GPIO_Port, STCP_Pin, GPIO_PIN_SET);// 再将STCP拉高,STCP即可产生一个上升沿
for_delay_us(5);
}
/*
for循环实现延时us
*/
void for_delay_us(uint32_t nus)
{
uint32_t Delay = nus * 168/4;
do
{
}
while (Delay --);
}5.while(1)中实现的功能函数
if (flag == 1)
{
flag = 0;
HAL_GPIO_WritePin(BEEP_GPIO_Port, BEEP_Pin, GPIO_PIN_SET);
HAL_Delay(200);
HAL_GPIO_WritePin(BEEP_GPIO_Port, BEEP_Pin, GPIO_PIN_RESET);
HAL_Delay(200);
}
HAL_GPIO_WritePin(GPIOA, SEG1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, SEG2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, SEG3_Pin, GPIO_PIN_RESET);
HC595_Send_Byte(table[s/10]);//函数调用
for_delay_us(5); // 适当延时
HC595_Send_Byte(0xff); // 消影
HAL_GPIO_WritePin(GPIOA, SEG2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, SEG1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, SEG3_Pin, GPIO_PIN_RESET);
HC595_Send_Byte(table[s%10]);//函数调用
for_delay_us(5); // 适当延时
HC595_Send_Byte(0xff);// 消影 五、实验现象
 文章来源:https://www.toymoban.com/news/detail-845550.html
文章来源:https://www.toymoban.com/news/detail-845550.html
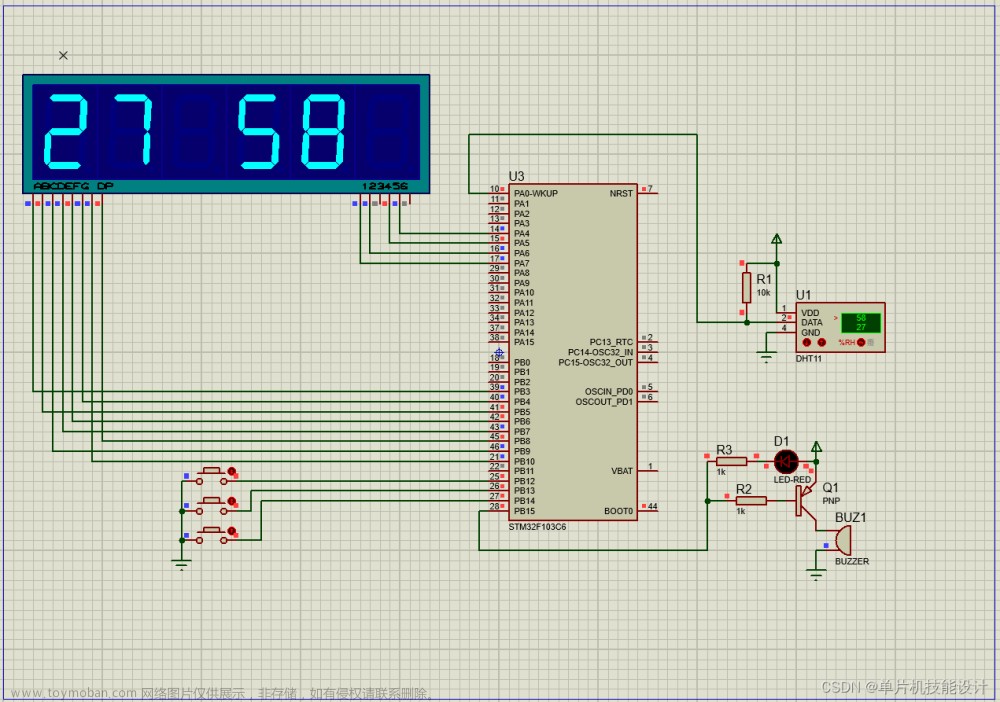
六、仿真实现
 文章来源地址https://www.toymoban.com/news/detail-845550.html
文章来源地址https://www.toymoban.com/news/detail-845550.html
总结
到了这里,关于【STM32+HAL+Proteus】系列学习教程---数码管显示定时的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!