直接意识代码:
int main()
{
while(1)
{
//LED1置为高电平
......
//延时1000MS
......
//LED1置为低电平
......
//延时1000MS
......
//LED2置为高电平
......
//延时500MS
......
//LED2置为低电平
......
//延时500MS
......
}
}
这是我们大脑最希望的添加代码方式,很显然他是错的,两个任务之间产生了相互的影响,使得两个任务都执行错误,这种思想在裸机开发中肯定是错的,但是在我们的RTOS中他就可以是对的。
任务型代码:
//创建LED1任务
void LED1_Task()
{
//LED1置为高电平
......
//延时1000MS
......
//LED1置为低电平
......
//延时1000MS
......
}
//创建LED2任务
void LED2_Task()
{
//LED2置为高电平
......
//延时500MS
......
//LED2置为低电平
......
//延时500MS
......
}
这是独立的两个任务内容,我们只需要把他的扔到我们的任务执行器里,他就会**“同时”运行了,很多小伙伴就会疑问了,单片机明明只有一个核**,为什么可以同时执行多个任务呢?这就需要去了解RTOS操作系统中任务“同时”执行的原理。
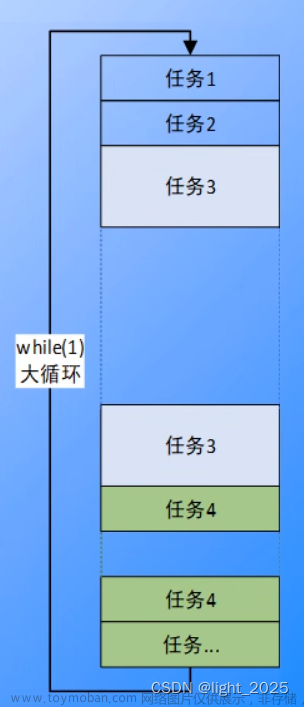
1.4 任务“同时”执行的原理
在RTOS中,RTOS利用了一种类似于**“视觉暂留”的工作原理,多个任务之间快速切换。在ROTS中,可以让我们的每个任务执行一个时间单位**,然后就切换到另外一个任务执行一个时间单位,再切换回去,两个任务都是独立运行的,互不影响,由于切换的频率很快,就感觉像是同时运行的一样。

上图为一个简单的示意图,读者朋友们可以结合该图好好理解一下RTOS系统的执行过程。
二、 FreeRTOS的手动移植
为了图方便,笔者这里直接使用CubeMX去生成一个基于HAL库的初始STM32工程文件。不习惯用HAL库的,可以找一个标准库的初始STM32工程文件,进行手动移植工作。
①、建立STM32空工程
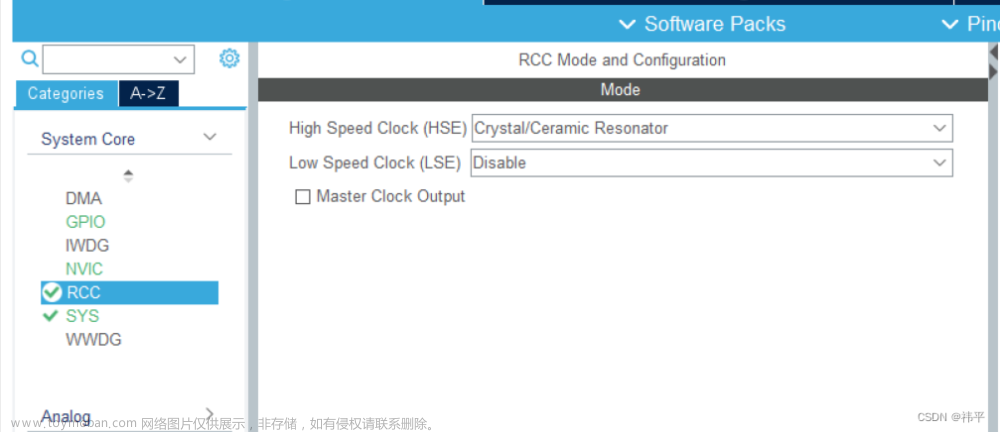
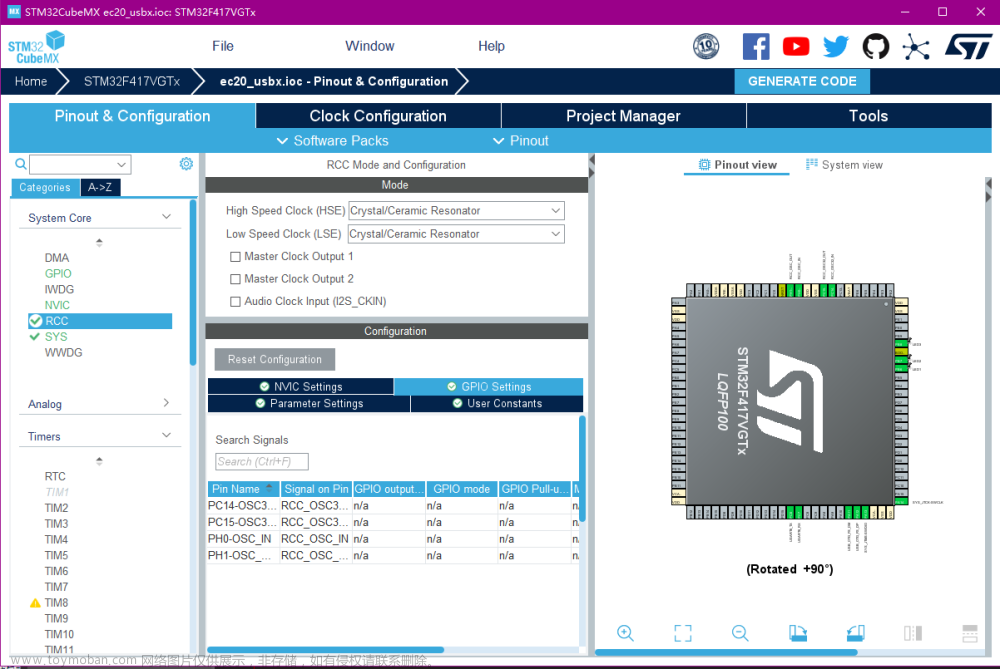
这里使用STM32CubeMX快速创建项目,要注意的是我们完成最基本的配置以后,需要将我们的Timebase Source修改一下,修改成除了滴答定时器的其他定时器,如下图:

这里我使用的TIM2作为Timebase Source
为什么不可以使用滴答定时器呢?
在FreeRTOS中我们的SysTick定时器被用于了我们的始终基准,它用来实现我们的任务切换,我们的SysTick定时器每次触发我们的中断(默认是一毫秒,可以自行修改为其他值)
Timebase Source是干嘛的呢?
简单的说,正常裸机开发中我们的SysTick定时器是用来主要是用来进行我们的HAL_Delay()延时的,使用其作为基准,前面我们说了SysTick定时器被用于系统任务切换了,所以它就是一直在工作,或者说一直在触发中断,这样的话我们的**HAL_Delay()就需用使用我们的其他定时器(TIM2)**进行替代其作用了
②、FreeRTOS内核下载
这一步将会教大家如何去下载FreeRTOS内核以及如何进行移植到我们的项目里面。
首先,登入FreeRTOS的官网,地址:FreeRTOS - Market leading RTOS (Real Time Operating System) for embedded systems with Internet of Things extensions for embedded systems with Internet of Things extensions")
点击右上角的Download FreeRTOS;

来到版本选择界面;

上面的是FreeRTOS****的最新版本,下面的就是长期维护的版本 ;
我们直接点击上面这个Github的超链接;

然后就依次带点击Code和Download ZIP;

但是,这时候下载完成的压缩波其实并不包含FreeRTOS的子模块。所以,在该页面向下翻找。

找到Kernel source(内核资源) 这里,点击箭头处的超链接;

按照上方步骤下载压缩包,之后进行解压,最终成功得到2个文件夹;

其中,FreeRTOS-Kernel-main是FreeRTOS的内核文件,FreeRTOS-main文件夹下的内容则比较繁杂,我们主要看里面Demo文件;

Demo文件夹里面的文件非常多,不过我们可以找到这样一个文件夹CORTEX_STM32F103_Keil;

CORTEX_STM32F103_Keil文件夹为官方将系统已经移植好的实例,但是这并不是我们直接移植的,感兴趣的小伙伴可以先打看官方移植好的能不能看懂。
③、手动移植FreeRTOS内核文件
1、打开第一步建立的新项目
2、左侧项目文件添加两个新的分组

3、建立对应的FreeRTOS文件夹

4、打开FreeRTOS-Kernel文件夹
5、主目录下所有的.C后缀的文件全部复制我们的FreeRTOS文件夹下(一共七个)

6、复制include文件夹以及portable文件夹到FreeRTOS文件夹下

7、保留FreeRTOS/portable文件夹中的Keil、MemMang、RVDS文件夹,其余全部删除

8、保留FreeRTOS/portable/RVDS文件夹中的ARM_CM3文件夹

9、然后如图进行Keil项目的分组文件配置


10、添加对应的头文件

11、直接编译(出现9个错误)

④、项目问题修复
缺少FreeRTOSConfig.h文件(FreeRTOS的配置文件)

示例项目中复制粘贴并且添加到项目文件夹中(记得添加头文件路径)



编译无错误
⑤、项目添加处理
虽然没有错误了,但是我们的移植没有完成,还有一些小步骤需要完成,的确有些繁琐,好在逻辑性还是比较强的,理解起来相对容易。
在FreeRTOSConfig.h中添加#define xPortPendSVHandler PendSV_Handler
在FreeRTOSConfig.h中添加#define xPortSysTickHandler SysTick_Handler
在FreeRTOSConfig.h中添加#define vPortSVCHandler SVC_Handler
左边三个是我们Free RTOS中定义好的函数,右边的是系统项目本来就定义好的函数,他们的作用小伙伴们可以去了解一下,作为初学者这里不进行拓展,反正就是和我们操作系统的中断还有任务切换有关的函数
编译,还是报错,重复定义
处理错误: 进入对应的文件stm32f1xx_it.c删除重复的3个函数

OK移植成功了!!!
⑥、FreeRTOS点灯项目创建
相关的头文件引入:用到的头文件有**“FreeRTOS.h”(操作系统相关)和"task.h"(任务相关)**

自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数嵌入式工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则几千的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年嵌入式&物联网开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。



既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!


由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新
如果你觉得这些内容对你有帮助,可以+V:Vip1104z获取!!! (备注:嵌入式)

最后
资料整理不易,觉得有帮助的朋友可以帮忙点赞分享支持一下小编~
你的支持,我的动力;祝各位前程似锦,offer不断,步步高升!!!文章来源:https://www.toymoban.com/news/detail-846006.html
05)]
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新
如果你觉得这些内容对你有帮助,可以+V:Vip1104z获取!!! (备注:嵌入式)
最后
资料整理不易,觉得有帮助的朋友可以帮忙点赞分享支持一下小编~
你的支持,我的动力;祝各位前程似锦,offer不断,步步高升!!!
更多资料点击此处获qu!!文章来源地址https://www.toymoban.com/news/detail-846006.html
到了这里,关于基于STM32的实时操作系统FreeRTOS移植教程(手动移植)_stm32移植freertos(1)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!