自动驾驶汽车关键技术|感知

附赠自动驾驶学习资料和量产经验:链接
- 两套标准
分别由美国交通部下属的国家高速路安全管理局(NationalHighwayTraffic Safety Administration ,NHSTA) 和国际汽车工程师协会(Societyof Automotive Engineers,SAE) 制定的。

自动驾驶系统结构
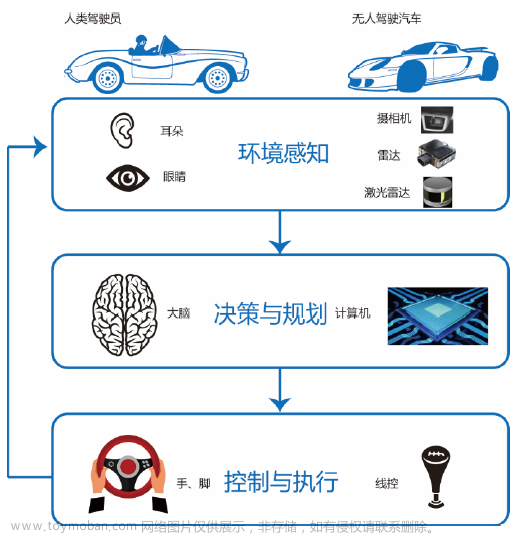
自动驾驶是一个由激光雷达(LiDAR) 、毫米波雷达(RADAR) 、摄像机(Camera ) 、全球定位系统(GPS ) 、惯性测量单元(IMU) 等多个传感器和子系统组成的高级复杂性系统性工程, 结构如图1 所示。

自动驾驶的关键技术为感知(Perception ) 、规划(Planning ) 和控制(Control ) 三部分。
感知部分和车辆传感器硬件交互与通信,规划主要负责汽车的行为等的计算,控制则是对汽车元器件的电子化操作。

感知
感知主要是通过环境感知进行定位。
Ø 环境感知(Environmental Perception ,EP)指对于环境的场景理解能力,例如障碍物的类型、道路标志及标线、行人车辆的检测、交通信号等数据的语义分类。
Ø 定位(Localization )是对感知结果的后处理, 通过定位功能从而帮助自动车了解其相对于所处环境的位置。
环境感知
自动驾驶系统的环境感知部分通常需要获取大量周围环境信息,确保自动车对车身周围环境的正确理解和对应决策。
具体来说包括:车道线检测、红绿灯识别、交通标识牌识别、行人检测、车辆的检测等。

车道线检测的两大主流方法是基于视觉的车道线检测和基于雷达的车道线检测。
- 基于雷达的车道线检测直接从点云中检测车道线,该方法对雷达的线束要求很高,32线及以下的激光雷达难以用于车道线检测,因为点云太稀疏,车道线的特征不明显。而64线及以上的激光雷达成本高昂,短期内难以大规模推广应用。

- 基于视觉的检测方法,简便直观易于理解,处理速度快,成本低,容易被市场所接受;

但该方法使用的硬件设备一一相机,其自身存在局限性,存在相机形变且容易受外界环境的影响,
尤其是在天气、光照等条件恶劣的情况下,容易对检测结果造成一定的偏差甚至无法检测。
可使用多传感器融合技术,先在图像中检测出车道线,然后将激光雷达生成的点投射到图像上,找出落在车道线上的点在激光雷达坐标系中的坐标,通过这些坐标即可拟合出激光雷达坐标系中的车道线。

红绿灯识别有两种方式,
- 一种是基于V2X,即智能网联技术。

- 另一种方式是基于人工智能的视觉算法,它也是目前业界使用最广泛的一种方法

交通标识牌识别的方式与红绿灯检测类似,可以直接使用深度神经网络对原始图像进行交通标识牌检测。也可以结合高精度地图,将交通标志信息存放在高精度地图中,在车辆行驶的过程中,直接根据车辆的位置从高精度地图中获取交通标志信息。

人、车辆的检测常用的方式有两种,
- 一种是直接使用激光雷达的数据进行目标检测。

- 另一种是融合激光雷达和相机进行目标检测。激光雷达能够提供精确的位置和大小信息,基于图像的深度学习更擅长目标类别的识别。

定位
定位是一台自动车的必备基础,它需要告诉车辆相对于外界环境的精确位置。在城市复杂道路行驶场景下,定位精度要求误差不超过10cm,如果定位位置偏差过大,那么在城市道路行驶中,车辆轮胎就很容易在行驶过程中擦到路牙,剐蹭到护栏等,还会引发爆胎等车辆驾驶安全问题,严重的甚至会引发交通安全事故。

目前使用最广泛的自动车定位方法是全球定位系统(GlobalPositioningSystem,GPS),但GPS的定位,精度越高,GPS和惯性导航等传感器的价格也就相对越昂贵。除此之外还有:
-
点云地图(如图5所示)的雷达定位、
-
雷达和摄像机融合定位、文章来源:https://www.toymoban.com/news/detail-846144.html
-
摄像机定位惯性导航系统(INS)文章来源地址https://www.toymoban.com/news/detail-846144.html
到了这里,关于自动驾驶汽车关键技术_感知的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!