【STM32篇】4988驱动步进电机_hr4988-CSDN博客
在上篇文章中使用了HR4988实现了步进电机的驱动,在实际运用过程,HR4988或者A4988驱动步进电机会存在电机噪音太大的现象。本次将向各位友友介绍一个驱动简单且非常静音的一款步进电机驱动IC。

1.DRV8425简介
1.1 引脚配置和功能



1.AOUT1、AOUT2连接电机的A+、A-,BOUT1、BOUT2连接电机的B+、B-;
2.CPH、CPL之间连接一个22nF的陶瓷电容器,这里如果使用了其他容量的电容,可能导致IC无法正常输出,所以在其他配置都没问题时器件无法输出,可能就说电容用错了(亲测如此)。
3.DIR、方向输入内置下拉,可接到MCU引脚上控制。
4.ENABLE引脚低电平禁用输出,高电平启动输出,内部上拉至DVDD。可连接至MCU引脚控制。
5.DVDD逻辑电源电压,典型值5V,可用于其他输入引脚上拉。
6.VREF电流设定基准输入,最大值3.3V。满量程调节电流 (IFS):IFS (A) = VREF (V)/KV (V/A) = VREF (V)/1.32 (V/A)。
7.M0、M1设置步进模式,按照下表在M0、M1引脚上施加相应电压即可配置为需要的步进模式。
| M0 | M1 | 步进模式 |
| 0 | 0 |
100%
电流的全步进
(
两相励磁
)
|
| 0 |
330k
Ω
至 GND
|
71%
电流的全步进
(
两相励磁
)
|
| 1 | 0 |
非循环
1/2
步进
|
| Hi-Z | 0 |
1/2
步进
|
| 0 | 1 |
1/4
步进
|
| 1 | 1 |
1/8
步进
|
| Hi-Z | 1 |
1/16
步进
|
| 0 | Hi-Z |
1/32
步进
|
| Hi-Z | 330kΩ 至 GND |
1/64
步进
|
| 高阻态 | 高阻态 |
1/128
步进
|
| 1 | Hi-Z |
1/256
步进
|
电平输入如下图:

8.DECAY0、DECAY1衰减模式设置引脚(根据自己的需求选择不同的衰减模式,这里直接使用智能调优动态)
| DECAY0 | DECAY1 | 上升步进 | 下降步进 |
| 0 | 0 | 智能调优动态衰减 | 智能调优动态衰减 |
| 0 | 1 | 智能调优纹波控制 | 智能调优纹波控制 |
| 1 | 0 | 混合衰减:快 30% | 混合衰减:快 30% |
| 1 | 1 | 慢速衰减 | 混合衰减:快 30% |
| 高阻态 | 0 | 混合衰减:快 60% | 混合衰减:快 60% |
| 高阻态 | 1 | 慢速衰减 | 慢速衰减 |
9.STEP步进输入,上升沿前进一步,可接MCU的PWM引脚。软件也主要控制STEP/DIR引脚实现步进电机控制。
10.TOFF设置电流斩波期间的衰减模式关断时间;四电平引脚。还将设置智能调优纹波控制模式中的纹波电流。
| TOFF | 特定微步进级别下的电流纹波 |
| 0 | 19mA + ITRIP 的 1% |
| 1 | 19mA + ITRIP 的 2% |
| Hi-Z | 19mA + ITRIP 的 4% |
| 330KΩ至GND | 19mA + ITRIP 的 6% |
该纹波控制方法可以更严格地调节电流电平,从而提高电机效率和系统性能。智能调优纹波控制适用于能够承受可变关断时间调节方案的系统,以在电流调节中实现小电流纹波。选择低纹波电流设置可确保 PWM 频率不处于可闻范围之内。不过,较高的纹波电流值会降低 PWM 频率,从而降低开关损耗。
| TOFF | 关断时间 |
| 0 | 7us |
| 1 | 16us |
| Hi-Z | 24us |
| 330KΩ至GND | 32us |
除智能调优纹波控制模式外,TOFF 引脚将配置所有衰减模式的 PWM 关断时间。
11.nFAULT故障指示,故障时被下拉至低电平,需要外接上拉电阻。(可根据MCU上拉至3.3V)
12.nSLEEP睡眠模式输入,高电平启用器件。低电平脉冲将清除故障。请勿将该引脚接到DVDD,否则将无法退出睡眠模式。
复位脉冲:该脉冲的宽度必须在 20µs 至 40µs 之间。如果 nSLEEP 在 40µs 至 120µs 的时间内保持低电平,则会清除故障,但器件有可能会关断,也有可能不关断。
1.2硬件电路连接

1.电源输入VCC工作电源电源:4.5V至33V。可根据电机规则选择合适的工作电压;
2.步进模式:通过修改R2、R3、R6、R7选择不同的步进模式,此处为1/125步进模式(125个脉冲电机步进1.8°)。
3.DECAY0、DECAY1=01,使用智能调优纹波控制,TOFF = 0,电流纹波19mA + ITRIP 的 1%。
4.通过R8、R10分压给VREF,调节输出电流大小。
5.DIR/STEP、ENABLE、nSEELP引脚由单片机控制外接单片机控制。
在不出故障的前提下,使用DIR/STEP引脚控制步进电机,代码与4988几乎相同,但是不能软件改变步进模式。如果需要使用软件改变步进模式,可以选择DRV8434,其功能相似且支持SPI串行通行,可输出具体故障信息(例如电机未接入,IC通过nFULL引脚输出低电平报警,通过SPI可查询故障信息)。对于DRV8434的电机控制也可以直接使用DIR/STEP 引脚控制。文章来源:https://www.toymoban.com/news/detail-847578.html
1.3 PCB文件


2.软件设计
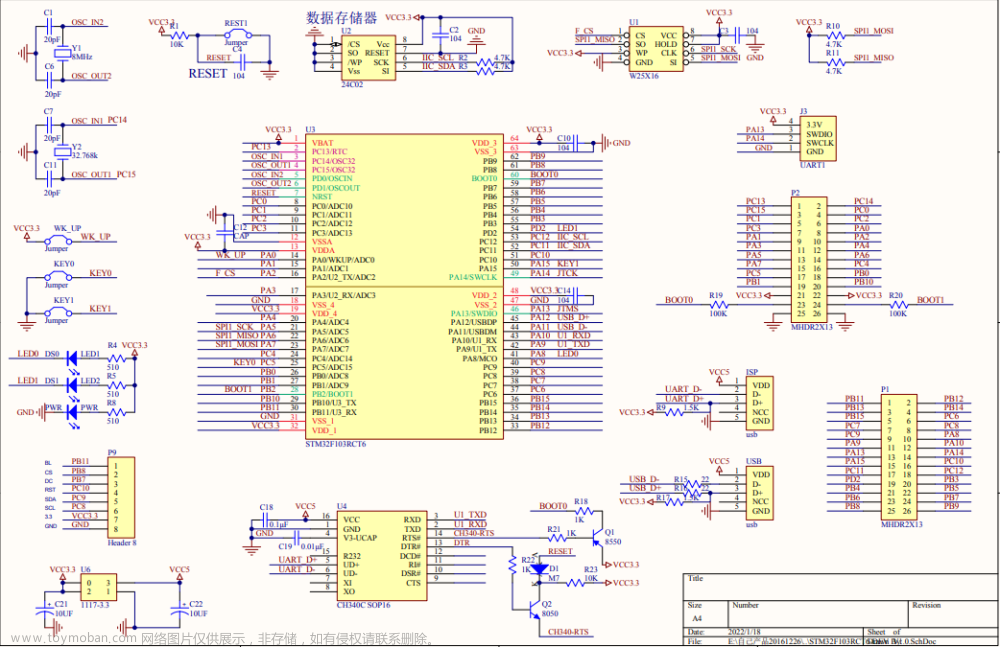
在单片机选择上本次使用STM32F103C8T6。引脚连接如下图:文章来源地址https://www.toymoban.com/news/detail-847578.html
到了这里,关于【STM32篇】DRV8425驱动步进电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!