必备的API知识
第 1 步:系统上电复位,进入启动文件 startup_stm32h743xx.s,在这个文件里面执行复位中断服务程序。
- 在复位中断服务程序里面执行函数 SystemInit,在system_stm32h7xx.c 里面。*
- 之后是调用编译器封装好的函数,比如用于 MDK 的启动文件是调__main,最终进入到 main函数*
第 2 步:进入到 main 函数就可以开始用户应用程序编程了。在这个函数里面要做几个重要的初始化,依次是:
- MPU 初始化,需要用到库文件
stm32h7xx_hal_cortex.c 和stm32h7xx_hal_cortex.h。 - Cache 初始化,需要用到 core_cm7.h 文件。
- HAL 库初始化函数 HAL_Init,需要用到文件 stm32h7xx_hal.c。
- 系统时钟初始化,需要用到库文件 stm32h7xx_hal_rcc.c。
函数 HAL_Init()
HAL_StatusTypeDef HAL_Init(void)
{
/* 设置中断优先级分组 */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
/* 使用滴答定时器做为默认时基,配置为 1ms 滴答,另外系统上电后默认使用的 HIS 时钟 */
if(HAL_InitTick(TICK_INT_PRIORITY) != HAL_OK)
{
return HAL_ERROR;
}
/* 初始化底层硬件 */
HAL_MspInit();
/* 返回函数状态 */
return HAL_OK;
}
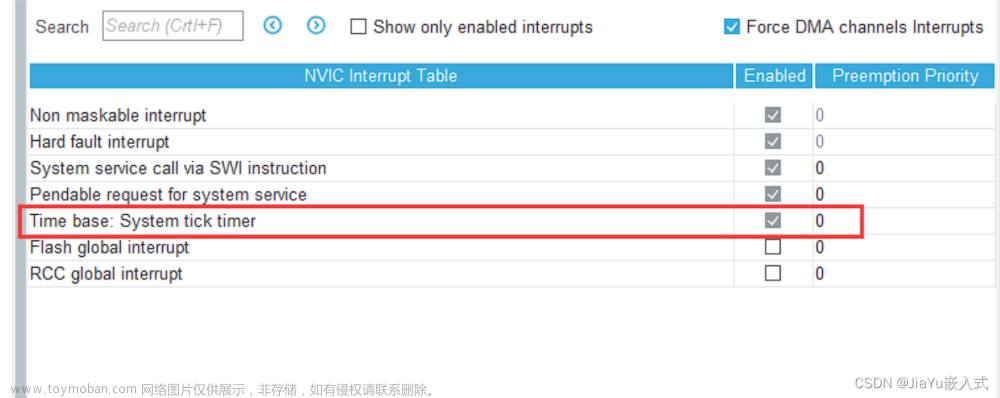
此函数用于初始化 HAL 库,此函数主要实现如下功能:
- 设置 NVIC 优先级分组是 4。
- 设置滴答定时器的每 1ms 中断一次。
- HAL 库不像之前的标准库,在系统启动函数 SystemInit 里面做了 RCC 初始化,HAL 库是没有做的,
所以进入到 main 函数后,系统还在用内部高速时钟 HSI,对于 H7 来说,HSI 主频是 64MHz。 - 函数 HAL_Init 里面调用的 HAL_MspInit 一般在文件 stm32h7xx_hal_msp.c 里面做具体实现,主要
用于底层初始化。当前此函数也在文件 stm32h7xx_hal.c 里面,只是做了弱定义。
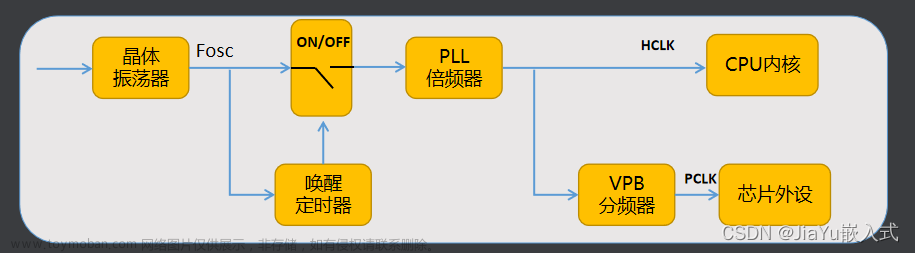
源文件 sttm32h7xx_hal_rcc.c
这个文件主要是实现内部和外部时钟(HSE、HSI、LSE、CSI、LSI、HSI48、PLL、CSS、MCO)以
及总线时钟(SYSCLK、AHB3、 AHB1、AHB2、AHB4、APB3、APB1L、APB1H、APB2、 APB4)的配置。
系统上电复位后,用户需要完成以下工作:
⚫选择用于驱动系统时钟的时钟源。
⚫ 配置系统时钟频率和 Flash 设置。
⚫ 配置分频器。
⚫ 使能外设时钟。
⚫ 配置外设时钟源,部分外设的时钟可以不来自系统时钟,此时通过配置寄存器 RCC_D1CCIPR、
RCC_D2CCIP1R、RCC_D2CCIP2R 和 RCC_D3CCIPR 实现
函数 HALRCCClockConfig()
RCC_ClkInitTypeDef RCC_ClkInitStruct;
HAL_StatusTypeDef ret = HAL_OK;
/*
选择 PLL 的输出作为系统时钟
配置 RCC_CLOCKTYPE_SYSCLK 系统时钟
配置 RCC_CLOCKTYPE_HCLK 时钟,对应 AHB1,AHB2,AHB3 和 AHB4 总线
配置 RCC_CLOCKTYPE_PCLK1 时钟,对应 APB1 总线
配置 RCC_CLOCKTYPE_PCLK2 时钟,对应 APB2 总线
配置 RCC_CLOCKTYPE_D1PCLK1 时钟,对应 APB3 总线
配置 RCC_CLOCKTYPE_D3PCLK1 时钟,对应 APB4 总线
*/
RCC_ClkInitStruct.ClockType = (RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_D1PCLK1 |
RCC_CLOCKTYPE_PCLK1 | \
RCC_CLOCKTYPE_PCLK2 | RCC_CLOCKTYPE_D3PCLK1);
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
/* 此函数会更新 SystemCoreClock,并重新配置 HAL_InitTick */
ret = HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4);
if(ret != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
源文件 sttm32h7xx_hal_cortex.c
这个库文件主要功能是 NVIC,MPU 和 Systick 的配置。此文件有个臃肿的地方,里面的 API 其实就
是将 ARM 的 CMSIS 库各种 API 重新封装了一遍。这么做的好处是保证了 HAL 的 API 都是以字母 HAL
开头。
MPU 单元
MPU 可以将 memory map 内存映射区分为多个具有一定访问规则的区域,通过这些规则可以实现
如下功能:
◆ 防止不受信任的应用程序访问受保护的内存区域。
◆ 防止用户应用程序破坏操作系统使用的数据。
◆ 通过阻止任务访问其它任务的数据区。
◆ 允许将内存区域定义为只读,以便保护重要数据。
◆ 检测意外的内存访问。
简单的说就是内存保护、外设保护和代码访问保护
MPU 可以配置保护 16 个内存区域(这 16 个内存域是独立配置的),每个区域最小要求 256 字节,
每个区域还可以配置为 8 个子区域。由于子区域一般都相同大小,这样每个子区域的大小就是 32 字节,正好跟 Cache 的 Cache Line 大小一样。
MPU 可以配置的 16 个内存区的序号范围是 0 到 15,还有默认区 default region,也叫作背景区,序号-1。由于这些内存区可以嵌套和重叠,所以这些区域在嵌套或者重叠的时候有个优先级的问题。序号15 的优先级最高,以此递减,序号-1,即背景区的优先级最低。这些优先级是固定的。下面通过一个具体的实例帮助大家理解。如下所示共有 7 个区,背景区和序号 0-5 的区。内存区 4 跟内存区 0 和 1 有重叠部分,那么重叠部分将按照内存区 4 的配置规则执行;内存区 5 被完全包含在内存区3 里面,那么这部分内存区将按照内存区 5 的配置规则执行。
函数 HAL_MPU_ConfigRegion()
== 函数原型:==
void HAL_MPU_ConfigRegion(MPU_Region_InitTypeDef *MPU_Init)
{
/* 部分省略未写 */
/* Set the Region number */
MPU->RNR = MPU_Init->Number;
if ((MPU_Init->Enable) != RESET)
{
/* 部分省略未写 */
MPU->RBAR = MPU_Init->BaseAddress;
MPU->RASR = ((uint32_t)MPU_Init->DisableExec << MPU_RASR_XN_Pos) |
((uint32_t)MPU_Init->AccessPermission << MPU_RASR_AP_Pos) |
((uint32_t)MPU_Init->TypeExtField << MPU_RASR_TEX_Pos) |
((uint32_t)MPU_Init->IsShareable << MPU_RASR_S_Pos) |
((uint32_t)MPU_Init->IsCacheable << MPU_RASR_C_Pos) |
((uint32_t)MPU_Init->IsBufferable << MPU_RASR_B_Pos) |
((uint32_t)MPU_Init->SubRegionDisable << MPU_RASR_SRD_Pos) |
((uint32_t)MPU_Init->Size << MPU_RASR_SIZE_Pos) |
((uint32_t)MPU_Init->Enable << MPU_RASR_ENABLE_Pos);
}
else
{
MPU->RBAR = 0x00;
MPU->RASR = 0x00;
}
}
函数参数
此函数的形参是一个 MPU_Region_InitTypeDef 类型的结构体变量,定义如下:
typedef struct
{
uint8_t Enable;
uint8_t Number;
uint32_t BaseAddress;
uint8_t Size;
uint8_t SubRegionDisable;
uint8_t TypeExtField;
uint8_t AccessPermission;
uint8_t DisableExec;
uint8_t IsShareable;
uint8_t IsCacheable;
uint8_t IsBufferable;
}MPU_Region_InitTypeDef;
STM32H7 的 Cache
当前芯片厂商出的 M7 内核芯片基本都做了一级 Cache 支持,Cache 又分数据缓存 D-Cache 和指令
缓冲 I-Cache,STM32H7 的数据缓存和指令缓存大小都是 16KB。对于指令缓冲,用户不用管,这里主
要说的是数据缓存 D-Cache。以 STM32H7 为例,主频是 400MHz,除了 TCM 和 Cache 以 400MHz
工作,其它 AXI SRAM,SRAM1,SRAM2 等都是以 200MHz 工作。数据缓存 D-Cache 就是解决 CPU
加速访问 SRAM。
如果每次 CPU 要读写 SRAM 区的数据,都能够在 Cache 里面进行,自然是最好的,实现了 200MHz
到 400MHz 的飞跃,实际是做不到的,因为数据 Cache 只有 16KB 大小,总有用完的时候。
对于使能了 Cache 的 SRAM 区,要分读写两种情况考虑。
读操作:
如果 CPU 要读取的 SRAM 区数据在 Cache 中已经加载好,这就叫读命中(Cache hit),如果 Cache
里面没有怎么办,这就是所谓的读 Cache Miss。
写操作:
如果 CPU 要写的 SRAM 区数据在 Cache 中已经开辟了对应的区域(专业词汇叫 Cache Line,以 32
字节为单位),这就叫写命中(Cache hit),如果 Cache 里面没有开辟对应的区域怎么办,这就是所谓的写 Cache Miss。
总结:
- Cortex-M7 内核的 L1 Cache 由多行内存区组成,每行有 32 字节,每行都配有一个地址标签。数据
缓冲 DCache 是每 4 行为一组,称为 4-way set associative。而指令缓冲区 ICache 是 2 行为一组,
这样节省地址标签,不用每个行都标记一个地址。 - 对于读操作,只有在第 1 次访问指定地址时才会加载到 Cache,而写操作的话,可以直接写到内存中
(write-through 模式)或者放到 Cache 里面,后面再写入(write-back 模式)。 - 如果采用的是 Write back,Cache line 会被标为 dirty,等到此行被 evicted 时,才会执行实际的写
操作,将 Cache Line 里面的数据写入到相应的存储区。 - Cache 命中是访问的地址落在了给定的 Cache Line 里面,所以硬件需要做少量的地址比较工作,以
检查此地址是否被缓存。如果命中了,将用于缓存读操作或者写操作。如果没有命中,则分配和标记
新行,填充新的读写操作。如果所有行都分配完毕了,Cache 控制器将支持 eviction 操作。根据 Cache
Line 替换算法,一行将被清除 Clean,无效化 Invalid 或者重新配置。数据缓存和指令缓存是采用的
伪随机替换算法。 - Cache 支持的 4 种基本操作,使能,禁止,清空和无效化。Clean 清空操作是将 Cache Line 中标记
为 dirty 的数据写入到内存里面,而无效化 Invalid 是将 Cache Line 标记为无效,即删除操作。
面对繁冗复杂的 Cache 配置,推荐方式和安全隐患解决办法
◆ 推荐使用 128KB 的 TCM 作为主 RAM 区,其它的专门用于大缓冲和 DMA 操作等。
◆ Cache 问题主要是 CPU 和 DMA 都操作这个缓冲区时容易出现,使用时要注意。
◆ Cache 配置的选择,优先考虑的是 WB,然后是 WT 和关闭 Cache,其中 WB 和 WT 的使用中可以
配合 ARM 提供的函数解决上面说到的隐患问题(见本章 24.6 小节)。但不是万能的,在不起作用的
时候,直接暴力选择函数 SCB_CleanInvlaidateDCache 解决。关于这个问题,在分别配置以太网
MAC 的描述符缓冲区,发送缓冲区和接收缓冲区时尤其突出。
Cache 的相关函数
CMSIS 软件包的 core_cm7.h 文件为 Cache 的配置提供了 11 个函数:
◆ SCB_EnableICache
◆ SCB_DisableICache
◆ SCB_InvalidateICache
◆ SCB_EnableDCache
◆ SCB_DisableDCache
◆ SCB_InvalidateDCache
◆ SCB_CleanDCache
◆ SCB_CleanInvalidateDCache
◆ SCB_InvalidateDCache_by_Addr
◆ SCB_CleanDCache_by_Addr
◆ SCB_CleanInvalidateDCache_by_Addr
其中前三个函数是指令 Cache,比较容易掌握。重点是后面几个数据 Cache 函数。由于函数 SCB_CleanInvalidateDCache,SCB_CleanDCache 和 SCB_InvalidateDCache是对整个 Cache 的操作,所以比最后的三个函数 SCB_InvalidateDCache_by_Addr,SCB_CleanDCache_by_Addr 和 SCB_CleanInvalidateDCache_by_Addr 要耗时,当然,如果用户操作的存储器超过了数据 Cache 的大小,即 16KB,那么就跟前三个函数没有区别了。
STM32H7 的 TCM,SRAM 等五块内存基础知识
◆ TCM : Tightly-Coupled Memory 紧密耦合内存 。ITCM 用于指令,DTCM 用于数据,特点是跟内
核速度一样,而片上 RAM 的速度基本都达不到这个速度。
◆ ITCM 和 DTCM
这两个是直连 CPU 的。
◆ D1 Domain
D1 域中的各个外设是挂在 64 位 AXI 总线组成 67 的矩阵上。
⚫ 6 个从接口端 ASIB1 到 ASIB6
外接的主控是 LTDC,DMA2D,MDMA,SDMMC1,AXIM 和 D2-to-D1 AHB 总线。
⚫ 7 个主接口端 AMIB1 到 AMIB7
外接的从设备是 AHB3 总线,Flash A,Flash B,FMC 总线,QSPI 和 AXI SRAM。另外 AHB3
也是由 AXI 总线分支出来的,然后再由 AHB3 分支出 APB3 总线。
◆ D2 Domain
D2 域的各个外设是挂在 32 位 AHB 总线组成 109 的矩阵上。
⚫ 10 个从接口
外接的主控是 D1-to-D2 AHB 总线,AHBP 总线,DMA1,DMA2,Ethernet MAC,SDMMC2,
USB HS1 和 USB HS2。
⚫ 9 个主接口
外接的从设备是 SRAM1,SRMA2,SRAM3,AHB1,AHB2,APB1,APB2,D2-to-D1 AHB
总线和 D2-to-D3 AHB 总线。
◆ D3 Domain
D3 域的各个外设是挂在 32 位 AHB 总线组成 3*2 的矩阵上。
⚫ 3 个从接口
外接的主控 D1-to-D3 AHB 总线,D2-to-D3 AHB 总线和 BDMA。
⚫ 2 个主接口
外接的从设备是 AHB4,SRAM4 和 Bckp SRAM。另外 AHB4 也是这个总线矩阵分支出来的,
然后再由 AHB4 分支出 APB4 总线
各块 RAM 特性
TCM 区
TCM : Tightly-Coupled Memory 紧密耦合内存 。ITCM 用于运行指令,也就是程序代码,DTCM
用于数据存取,特点是跟内核速度一样,而片上 RAM 的速度基本都达不到这个速度,所以有降频处
理。
速度:400MHz。
DTCM 地址:0x2000 0000,大小 128KB。
ITCM 地址:0x0000 0000,大小 64KB。
AXI SRAM 区
位于 D1 域,数据带宽是 64bit,挂在 AXI 总线上。除了 D3 域中的 BDMB 主控不能访问,其它都可
以访问此 RAM 区。
速度:200MHz。
地址:0x2400 0000,大小 512KB。
用途:用途不限,可以用于用户应用数据存储或者 LCD 显存。
SRAM1,SRAM2 和 SRAM3 区
位于 D2 域,数据带宽是 32bit,挂在AHB 总线上。除了 D3域中的 BDMB主控不能访问这三块SRAM,
其它都可以访问这几个 RAM 区。
速度:200MHz。
SRAM1:地址 0x3000 0000,大小 128KB,用途不限,可用于 D2 域中的 DMA 缓冲,也可以当
D1 域断电后用于运行程序代码。
SRAM2:地址 0x3002 0000,大小 128KB,用途不限,可用于 D2 域中的 DMA 缓冲,也可以用于
用户数据存取。
SRAM3:地址 0x3004 0000,大小 32KB,用途不限,主要用于以太网和 USB 的缓冲。
SRAM4 区
位于 D3 域,数据带宽是 32bit,挂在 AHB 总线上,大部分主控都能访这块 SRAM 区。
速度:200MHz。
地址:0x3800 0000,大小 64KB。
用途:用途不限,可以用于 D3 域中的 DMA 缓冲,也可以当 D1 和 D2 域进入 DStandby 待机方式
后,继续保存用户数据。
Backup SRAM 区
备份 RAM 区,位于 D3 域,数据带宽是 32bit,挂在 AHB 总线上,大部分主控都能访问这块 SRAM
区。
速度:200MHz。
地址:0x3880 0000,大小 4KB。
用途:用途不限,主要用于系统进入低功耗模式后,继续保存数据(Vbat 引脚外接电池)。
串口的 HAL 库用法
串口的 HAL 库用法其实就是几个结构体变量成员的配置和使用,然后配置 GPIO、时钟,并根据需要
配置 NVIC、中断和 DMA。
HAL 库在 USART_TypeDef 的基础上封装了一个结构体 UART_HandleTypeDef,定义如下:
typedef struct
{
USART_TypeDef *Instance; /*!< UART registers base address */
UART_InitTypeDef Init; /*!< UART communication parameters */
UART_AdvFeatureInitTypeDef AdvancedInit; /*!< UART Advanced Features initialization parameters */
uint8_t *pTxBuffPtr; /*!< Pointer to UART Tx transfer Buffer */
uint16_t TxXferSize; /*!< UART Tx Transfer size */
__IO uint16_t TxXferCount; /*!< UART Tx Transfer Counter */
uint8_t *pRxBuffPtr; /*!< Pointer to UART Rx transfer Buffer */
uint16_t RxXferSize; /*!< UART Rx Transfer size */
__IO uint16_t RxXferCount; /*!< UART Rx Transfer Counter */
uint16_t Mask; /*!< UART Rx RDR register mask */
DMA_HandleTypeDef *hdmatx; /*!< UART Tx DMA Handle parameters */
DMA_HandleTypeDef *hdmarx; /*!< UART Rx DMA Handle parameters */
HAL_LockTypeDef Lock; /*!< Locking object */
__IO HAL_UART_StateTypeDef gState; /*!< UART state information related to global Handle management
and also related to Tx operations.
This parameter can be a value of @ref HAL_UART_StateTypeDef */
__IO HAL_UART_StateTypeDef RxState; /*!< UART state information related to Rx operations.
This parameter can be a value of @ref HAL_UART_StateTypeDef */
__IO uint32_t ErrorCode; /*!< UART Error code */
}UART_HandleTypeDef;
UART_InitTypeDef 结构体的定义如下:
typedef struct
{
uint32_t BaudRate; /* 波特率 */
uint32_t WordLength; /* 数据位长度 */
uint32_t StopBits; /* 停止位 */
uint32_t Parity; /* 奇偶校验位 */
uint32_t Mode; /* 发送模式和接收模式使能 */
uint32_t HwFlowCtl; /* 硬件流控制 */
uint32_t OverSampling; /* 过采样,可以选择 8 倍和 16 倍过采样 */
uint32_t Prescaler; /* 串口分频 */
uint32_t FIFOMode; /* 串口 FIFO 使能 */
uint32_t TXFIFOThreshold; /* 发送 FIFO 的阀值 */
uint32_t RXFIFOThreshold; /* 接收 FIFO 的阀值 */
}UART_InitTypeDef;
UART_AdvFeatureInitTypeDef AdvancedInit(这个参数用于配置串口的高级特性)具体支持的功能参数如下:
typedef struct
{
uint32_t AdvFeatureInit; /* 初始化的高级特性类别 */
uint32_t TxPinLevelInvert; /* Tx 引脚电平翻转 */
uint32_t RxPinLevelInvert; /* Rx 引脚电平翻转 */
uint32_t DataInvert; /* 数据逻辑电平翻转 */
uint32_t Swap; /* Tx 和 Rx 引脚交换 */
uint32_t OverrunDisable; /* 接收超时检测禁止 */
uint32_t DMADisableonRxError; /* 接收出错,禁止 DMA */
uint32_t AutoBaudRateEnable; /* 自适应波特率使能 */
uint32_t AutoBaudRateMode; /* 自适应波特率的四种检测模式选择 */
uint32_t MSBFirst; /* 发送或者接收数据时,高位在前 */
} UART_AdvFeatureInitTypeDef;
示例
配置串口参数,其实就是配置结构体 UART_HandleTypeDef 的成员。比如下面配置为波特率 115200,8个数据位,无奇偶校验,1 个停止位。
UART_HandleTypeDef UartHandle;
/* USART3 工作在 UART 模式 */
/* 配置如下:
- 数据位 = 8 Bits
- 停止位 = 1 bit
- 奇偶校验位 = 无
- 波特率 = 115200bsp
- 硬件流控制 (RTS 和 CTS 信号) */
UartHandle.Instance = USART3;
UartHandle.Init.BaudRate = 115200;
UartHandle.Init.WordLength = UART_WORDLENGTH_8B;
UartHandle.Init.StopBits = UART_STOPBITS_1;
UartHandle.Init.Parity = UART_PARITY_NONE;
UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
UartHandle.Init.Mode = UART_MODE_TX_RX;
UartHandle.Init.OverSampling = UART_OVERSAMPLING_16;
UartHandle.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if(HAL_UART_Init(&UartHandle) != HAL_OK)
{
Error_Handler();
}
串口外设的基本参数配置完毕后还不能使用,还需要配置 GPIO、时钟、中断等参数,比如下面配置
串口 1,使用引脚 PA9 和 PA10。
/* 串口 1 的 GPIO PA9, PA10 */
#define USART1_CLK_ENABLE() __HAL_RCC_USART1_CLK_ENABLE()
#define USART1_TX_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define USART1_TX_GPIO_PORT GPIOA
#define USART1_TX_PIN GPIO_PIN_9
#define USART1_TX_AF GPIO_AF7_USART1
/*
*********************************************************************************************************
* 函 数 名: InitHardUart
* 功能说明: 配置串口的硬件参数和底层
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void InitHardUart(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_PeriphCLKInitTypeDef RCC_PeriphClkInit;
#if UART1_FIFO_EN == 1 /* 串口 1 */
/* 使能 GPIO TX/RX 时钟 */
USART1_TX_GPIO_CLK_ENABLE();
USART1_RX_GPIO_CLK_ENABLE();
/* 使能 USARTx 时钟 */
USART1_CLK_ENABLE();
/* 配置 TX 引脚 */
GPIO_InitStruct.Pin = USART1_TX_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = USART1_TX_AF;
HAL_GPIO_Init(USART1_TX_GPIO_PORT, &GPIO_InitStruct);
/* 配置 RX 引脚 */
GPIO_InitStruct.Pin = USART1_RX_PIN;
GPIO_InitStruct.Alternate = USART1_RX_AF;
HAL_GPIO_Init(USART1_RX_GPIO_PORT, &GPIO_InitStruct);
/* 配置 NVIC the NVIC for UART */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 1);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* 配置波特率、奇偶校验 */
bsp_SetUartParam(USART1, UART1_BAUD, UART_PARITY_NONE, UART_MODE_TX_RX);
SET_BIT(USART1->ICR, USART_ICR_TCCF); /* 清除 TC 发送完成标志 */
SET_BIT(USART1->RQR, USART_RQR_RXFRQ); /* 清除 RXNE 接收标志 */
SET_BIT(USART1->CR1, USART_CR1_RXNEIE);/* 使能 PE. RX 接受中断 */
#endif
}
串口的状态标志清除问题
__HAL_USART_GET_FLAG 函数。这个函数用来检查 USART 标志位是否被设置。
/** @brief Check whether the specified USART flag is set or not.
* @param __HANDLE__: specifies the USART Handle
* @param __FLAG__: specifies the flag to check.
* This parameter can be one of the following values:
* @arg USART_FLAG_TXFT: TXFIFO threshold flag
* @arg USART_FLAG_RXFT: RXFIFO threshold flag
* @arg USART_FLAG_RXFF: RXFIFO Full flag
* @arg USART_FLAG_TXFE: TXFIFO Empty flag
* @arg USART_FLAG_REACK: Receive enable ackowledge flag
* @arg USART_FLAG_TEACK: Transmit enable ackowledge flag
* @arg USART_FLAG_BUSY: Busy flag
* @arg USART_FLAG_TXE: Transmit data register empty flag
* @arg USART_FLAG_TC: Transmission Complete flag
* @arg USART_FLAG_RXNE: Receive data register not empty flag
* @arg USART_FLAG_IDLE: Idle Line detection flag
* @arg USART_FLAG_ORE: OverRun Error flag
* @arg USART_FLAG_UDR: UnderRun Error flag
* @arg USART_FLAG_NE: Noise Error flag
* @arg USART_FLAG_FE: Framing Error flag
* @arg USART_FLAG_PE: Parity Error flag
* @retval The new state of __FLAG__ (TRUE or FALSE).
*/
#define __HAL_USART_GET_FLAG(__HANDLE__, __FLAG__) (((__HANDLE__)->Instance->ISR & (__FLAG__)) == (__FLAG__))
USART 标志是需要软件主动清零的。清零有两种方式:一种是调用__HAL_USART_CLEAR_FLAG 函数,另一种是操作相关寄存器后自动清零。
/** @brief Clear the specified USART pending flag.
* @param __HANDLE__: specifies the USART Handle.
* @param __FLAG__: specifies the flag to check.
* This parameter can be any combination of the following values:
* @arg USART_FLAG_TXFT: TXFIFO threshold flag
* @arg USART_FLAG_RXFT: RXFIFO threshold flag
* @arg USART_FLAG_RXFF: RXFIFO Full flag
* @arg USART_FLAG_TXFE: TXFIFO Empty flag
* @arg USART_FLAG_REACK: Receive enable ackowledge flag
* @arg USART_FLAG_TEACK: Transmit enable ackowledge flag
* @arg USART_FLAG_WUF: Wake up from stop mode flag
* @arg USART_FLAG_RWU: Receiver wake up flag (is the USART in mute mode)
* @arg USART_FLAG_SBKF: Send Break flag
* @arg USART_FLAG_CMF: Character match flag
* @arg USART_FLAG_BUSY: Busy flag
* @arg USART_FLAG_ABRF: Auto Baud rate detection flag
* @arg USART_FLAG_ABRE: Auto Baud rate detection error flag
* @arg USART_FLAG_RTOF: Receiver timeout flag
* @arg USART_FLAG_LBD: LIN Break detection flag
* @arg USART_FLAG_TXE: Transmit data register empty flag
* @arg USART_FLAG_TC: Transmission Complete flag
* * @arg USART_FLAG_RXNE: Receive data register not empty flag
* @arg USART_FLAG_IDLE: Idle Line detection flag
* @arg USART_FLAG_ORE: OverRun Error flag
* @arg USART_FLAG_NE: Noise Error flag
* @arg USART_FLAG_FE: Framing Error flag
* @arg USART_FLAG_PE: Parity Error flag
* @retval The new state of __FLAG__ (TRUE or FALSE).
*/
#define __HAL_USART_CLEAR_FLAG(__HANDLE__, __FLAG__) ((__HANDLE__)->Instance->ICR = (__FLAG__))
RS485 的基础知识
关于 RS485 的逻辑状态,不同厂家的芯片的定义可能不同,但不影响正常的数据收发,这里以 TI 的
为例做个说明,TI 的定义方式如下:
A 表示非反向输出 non-inverting output,B 表示反向输出 inverting output。
当 VA > VB 的时候表示逻辑状态 0,被称为 ON。
当 VA < VB 的时候表示逻辑状态 1,被称为 OFF。
对应到实际芯片框图上就是下面这样(DE 发送使能,D 是发送数据端,RE 是接收使能,R 是接收数据端)
当用户在 D(Driver)引脚输入逻辑高电平时,将在 485 总线上实现逻辑状态 0,即 ON 状态。接收端 R
(Receiver)将收到逻辑高电平。
当用户在 D(Driver)引脚输入逻辑低电平时,将在 485 总线上实现逻辑状态 1,即 OFF 状态。接收端 R
(Receiver)将收到逻辑低电平。
FMC 基础知识
FMC 的几个关键知识点放在开头说:
◆ STM32H7 的 FMC 总线是挂载 64 位带宽的 AXI 总线上,F1,F4 和 F7 是挂在 32 位总线上。
◆ 使用 FMC,可以用来外挂 NOR/PSRAM 型存储器,SRAM 型存储器,NAND 型存储器,SDRAM
存储器等,从而可以用来驱动 AD7606,OLED,DM9000 等并行控制设备。
◆ 支持 8 位,16 位和 32 位总线带宽控制。
◆ 每个片选下的存储器空间配置都是独立的,有专门的寄存器,互不影响。
FMC 时钟选择

FMC地址区域
FMC 总线可操作的地址范围 0x60000000 到 0xDFFFFFFF。
与 F1 和 F4 不同,H7 系列的 FMC 总线接口支持重映射,也就是可以设置这几块存储器的位置。
◆ 对于 NOR/PSRAM/SRAM 块区。
这个块区用到的地方最多,像 NAND 和 SDRAM 块区基本只能接 NAND 和 SDRAM,而
NOR/PSRAM/SRAM 区就不同了,除了能接这几种类型的存储器,还可以外接 DM9000,SDRAM,OLED,AD7606 等总线外设。这个块区有 4 路片选,分别是 FMC_NE1,FMC_NE2,FMC_NE3 和 FMC_NE4,这几个片选在芯片上都有对应的引脚,每个片选可以管理 64MB 的访问空间,这个是由 FMC 引出的 26路地址线 FMC_A[0:25]决定的,2^26 = 64MB。
⚫ FMC_NE1:首地址 0x6000 0000,可以管理的地址范围 0x6000 0000 到 0x63FF FFFF。
⚫ FMC_NE2:首地址 0x6400 0000,可以管理的地址范围 0x6400 0000 到 0x67FF FFFF。
⚫ FMC_NE3:首地址 0x6800 0000,可以管理的地址范围 0x6800 0000 到 0x6BFF FFFF。
⚫ FMC_NE4:首地址 0x6C00 0000,可以管理的地址范围 0x6C00 0000 到 0x6FFF FFFF。
NOR/PSRAM/SRAM 时序控制
F103 和 F407 仅支持 16 位总线访问,等到 F429,H7 已经支持 32 位总线访问。以驱动 SRAM 为例,
需要用到下面的数据,地址和控制引脚。配置完毕后,就可以像使用内部 SRAM 一样进行读写了,使用
比较方便。 文章来源:https://www.toymoban.com/news/detail-847697.html
文章来源:https://www.toymoban.com/news/detail-847697.html
NOR/PSARM/SRAM 时序配置结构体
FMC_NORSRAM_TimingTypeDef文章来源地址https://www.toymoban.com/news/detail-847697.html
typedef struct
{
uint32_t AddressSetupTime; //此参数用于设置地址建立时间,单位 FMC 时钟周期个数,范围 0 -15。同步 NOR Flash 用不到此参
数。
uint32_t AddressHoldTime; //此参数用于设置地址持续时间,单位 FMC 时钟周期个数,范围 1 -15。同步 NOR Flash 用不到此参
数。
uint32_t DataSetupTime; //此参数用于设置数据建立时间,单位 FMC 时钟周期个数,范围 1 -255。用于 SRAM,异步多路复用
uint32_t BusTurnAroundDuration; //此参数用于设置总线 TurnAround(总线周转阶段)持续时间,单位 FMC 时钟周期个数,范围 0 -15。仅用于多路复用 NOR Flash。
uint32_t CLKDivision; //此参数用于设置时钟分频,范围 2 -16,仅用于同步器件。
uint32_t DataLatency; //对于使能了读/写突发模式的同步访问,此参数定义了读写首个数据前要发送给存储器的时钟周期个数。
//操作 CRAM,此参数必须为 0。
//异步 NOR/PSRAM/SRAM 器件用不到此参数。
//使能了同步突发模式的 NOR Flash,此参数的范围是 2 – 17,单位 FMC 时钟周期个数。
uint32_t AccessMode; //用于设置 FMC 的访问模式
}FMC_NORSRAM_TimingTypeDef;
到了这里,关于STM32 H7系列学习笔记的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!