相关链接
此项目直接调用zed相机实现三维测距,无需标定,相关内容如下:
1.yolov5直接调用zed相机实现三维测距(python)
2. yolov4直接调用zed相机实现三维测距
3. Windows+YOLOV8环境配置
4.具体实现效果已在哔哩哔哩发布,点击此链接跳转
本篇博文工程源码下载(麻烦github给个星星)
下载链接:https://github.com/up-up-up-up/zed-yolov8
附:Zed调用YOLOv7测距也已经实现,但是3060笔记本6G显存带不动,在大现存服务器上可以运行,可能是由于YOLOv7网络结构导致的,由于不具备普适性,就不再写相关文章了,有需要的可以仿照这个代码去改写
1. 相关配置
python==3.7
Windows-pycharm
zed api 具体配置见 (zed api 配置步骤)
由于我电脑之前python版本为3.7,yolov8要求python最低为3.8,所以本次实验直接在虚拟环境里进行,未配置gpu,可能看着卡卡的,有需要的可以配置一下,原理是一样的
2. 版本一
2.1 相关代码
主代码 zed-yolo.py,具体放置在yolov8主目录下,盒子形式展现,可实现测距+跟踪
#!/usr/bin/env python3
import sys
import numpy as np
import argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics import YOLO
from threading import Lock, Thread
from time import sleep
import ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewer
lock = Lock()
run_signal = False
exit_signal = False
def xywh2abcd(xywh, im_shape):
output = np.zeros((4, 2))
# Center / Width / Height -> BBox corners coordinates
x_min = (xywh[0] - 0.5*xywh[2]) #* im_shape[1]
x_max = (xywh[0] + 0.5*xywh[2]) #* im_shape[1]
y_min = (xywh[1] - 0.5*xywh[3]) #* im_shape[0]
y_max = (xywh[1] + 0.5*xywh[3]) #* im_shape[0]
# A ------ B
# | Object |
# D ------ C
output[0][0] = x_min
output[0][1] = y_min
output[1][0] = x_max
output[1][1] = y_min
output[2][0] = x_max
output[2][1] = y_max
output[3][0] = x_min
output[3][1] = y_max
return output
def detections_to_custom_box(detections, im0):
output = []
for i, det in enumerate(detections):
xywh = det.xywh[0]
# Creating ingestable objects for the ZED SDK
obj = sl.CustomBoxObjectData()
obj.bounding_box_2d = xywh2abcd(xywh, im0.shape)
obj.label = det.cls
obj.probability = det.conf
obj.is_grounded = False
output.append(obj)
return output
def torch_thread(weights, img_size, conf_thres=0.2, iou_thres=0.45):
global image_net, exit_signal, run_signal, detections
print("Intializing Network...")
model = YOLO(weights)
while not exit_signal:
if run_signal:
lock.acquire()
img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2RGB)
# https://docs.ultralytics.com/modes/predict/#video-suffixes
det = model.predict(img, save=False, imgsz=img_size, conf=conf_thres, iou=iou_thres)[0].cpu().numpy().boxes
# ZED CustomBox format (with inverse letterboxing tf applied)
detections = detections_to_custom_box(det, image_net)
lock.release()
run_signal = False
sleep(0.01)
def main():
global image_net, exit_signal, run_signal, detections
capture_thread = Thread(target=torch_thread, kwargs={'weights': opt.weights, 'img_size': opt.img_size, "conf_thres": opt.conf_thres})
capture_thread.start()
print("Initializing Camera...")
zed = sl.Camera()
input_type = sl.InputType()
if opt.svo is not None:
input_type.set_from_svo_file(opt.svo)
# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=True)
init_params.coordinate_units = sl.UNIT.METER
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_maximum_distance = 50
runtime_params = sl.RuntimeParameters()
status = zed.open(init_params)
if status != sl.ERROR_CODE.SUCCESS:
print(repr(status))
exit()
image_left_tmp = sl.Mat()
print("Initialized Camera")
positional_tracking_parameters = sl.PositionalTrackingParameters()
# If the camera is static, uncomment the following line to have better performances and boxes sticked to the ground.
# positional_tracking_parameters.set_as_static = True
zed.enable_positional_tracking(positional_tracking_parameters)
obj_param = sl.ObjectDetectionParameters()
# obj_param.detection_model = sl.OBJECT_DETECTION_MODEL.CUSTOM_BOX_OBJECTS
obj_param.enable_tracking = True
zed.enable_object_detection(obj_param)
objects = sl.Objects()
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()
# Display
camera_infos = zed.get_camera_information()
camera_res = camera_infos.camera_resolution
# Create OpenGL viewer
viewer = gl.GLViewer()
point_cloud_res = sl.Resolution(min(camera_res.width, 720), min(camera_res.height, 404))
point_cloud_render = sl.Mat()
viewer.init(camera_infos.camera_model, point_cloud_res, obj_param.enable_tracking)
point_cloud = sl.Mat(point_cloud_res.width, point_cloud_res.height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)
image_left = sl.Mat()
# Utilities for 2D display
display_resolution = sl.Resolution(min(camera_res.width, 1280), min(camera_res.height, 720))
image_scale = [display_resolution.width / camera_res.width, display_resolution.height / camera_res.height]
image_left_ocv = np.full((display_resolution.height, display_resolution.width, 4), [245, 239, 239, 255], np.uint8)
# # Utilities for tracks view
# camera_config = camera_infos.camera_configuration
# tracks_resolution = sl.Resolution(400, display_resolution.height)
# track_view_generator = cv_viewer.TrackingViewer(tracks_resolution, camera_config.fps, init_params.depth_maximum_distance)
# track_view_generator.set_camera_calibration(camera_config.calibration_parameters)
# image_track_ocv = np.zeros((tracks_resolution.height, tracks_resolution.width, 4), np.uint8)
# Camera pose
cam_w_pose = sl.Pose()
while viewer.is_available() and not exit_signal:
if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:
# -- Get the image
lock.acquire()
zed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)
image_net = image_left_tmp.get_data()
lock.release()
run_signal = True
# -- Detection running on the other thread
while run_signal:
sleep(0.001)
# Wait for detections
lock.acquire()
# -- Ingest detections
zed.ingest_custom_box_objects(detections)
lock.release()
zed.retrieve_objects(objects, obj_runtime_param)
# -- Display
# Retrieve display data
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA, sl.MEM.CPU, point_cloud_res)
point_cloud.copy_to(point_cloud_render)
zed.retrieve_image(image_left, sl.VIEW.LEFT, sl.MEM.CPU, display_resolution)
zed.get_position(cam_w_pose, sl.REFERENCE_FRAME.WORLD)
# 3D rendering
viewer.updateData(point_cloud_render, objects)
# 2D rendering
np.copyto(image_left_ocv, image_left.get_data())
cv_viewer.render_2D(image_left_ocv, image_scale, objects, obj_param.enable_tracking)
global_image = image_left_ocv
# global_image = cv2.hconcat([image_left_ocv, image_track_ocv])
# # Tracking view
# track_view_generator.generate_view(objects, cam_w_pose, image_track_ocv, objects.is_tracked)
cv2.imshow("ZED | 2D View and Birds View", global_image)
key = cv2.waitKey(10)
if key == 27:
exit_signal = True
else:
exit_signal = True
viewer.exit()
exit_signal = True
zed.close()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='yolov8n.pt', help='model.pt path(s)')
parser.add_argument('--svo', type=str, default=None, help='optional svo file')
parser.add_argument('--img_size', type=int, default=416, help='inference size (pixels)')
parser.add_argument('--conf_thres', type=float, default=0.4, help='object confidence threshold')
opt = parser.parse_args()
with torch.no_grad():
main()
2.2 实验结果
测距图(感觉挺精准的)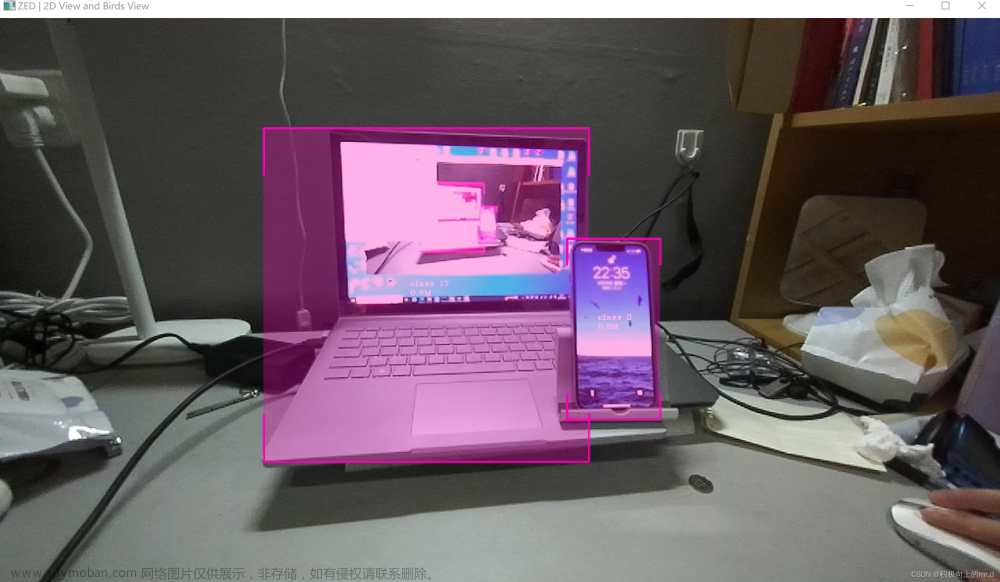
视频展示:
Zed相机+YOLOv8目标检测跟踪
3. 版本二
3.1 相关代码
主代码 zed.py,具体放置在yolov8主目录下,可实现测距+跟踪+分割,完整代码六月开源
#!/usr/bin/env python3
import math
import sys
import numpy as np
from PIL import Image
import argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics.utils.plotting import Annotator, colors, save_one_box
from ultralytics import YOLO
from threading import Lock, Thread
from time import sleep
import ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewer
zed = sl.Camera()
# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters()
init_params.camera_resolution = sl.RESOLUTION.HD720
init_params.coordinate_units = sl.UNIT.METER
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_maximum_distance = 20 # 设置最远距离
runtime_params = sl.RuntimeParameters()
status = zed.open(init_params)
if status != sl.ERROR_CODE.SUCCESS:
print(repr(status))
exit()
image_left_tmp = sl.Mat()
print("Initialized Camera")
positional_tracking_parameters = sl.PositionalTrackingParameters()
zed.enable_positional_tracking(positional_tracking_parameters)
obj_param = sl.ObjectDetectionParameters()
obj_param.detection_model = sl.DETECTION_MODEL.CUSTOM_BOX_OBJECTS
obj_param.enable_tracking = True
zed.enable_object_detection(obj_param)
objects = sl.Objects()
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()
point_cloud_render = sl.Mat()
point_cloud = sl.Mat()
image_left = sl.Mat()
depth = sl.Mat()
# Utilities for 2D display
3.2 实验结果
可实现测距、跟踪和分割功能,这个代码没有加多线程,速度够用懒得写了,对速率要求高的可以自己写一下,实现不同功能仅需修改以下代码,具体见 此篇文章
model = YOLO("./yolov8n.pt")
img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2BGR)
result = model.predict(img, conf=0.5)
测距功能
跟踪功能 文章来源:https://www.toymoban.com/news/detail-847850.html
文章来源:https://www.toymoban.com/news/detail-847850.html
分割功能
视频展示文章来源地址https://www.toymoban.com/news/detail-847850.html
到了这里,关于yolov8直接调用zed相机实现三维测距(python)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!