前言
要利用matlab将二维数据矩阵拟合成一个二维曲面方程,首先,我们得明白什么是插值和拟合。下面,从对洋流数据的处理入手,先以一个基本的流程为例,进行问题的概述,然后介绍两种具体的方法。

原理初析
插值
根据已知的数据点,生成一个连续的函数,可以在任意位置求值。matlab 提供了多种插值方法,如线性插值、 B B B-样条插值、多项式插值等。
这些方法的优缺点和适用场合各有不同,一般来说,线性插值比较简单和快速,但可能不够平滑; B B B -样条插值比较平滑和灵活,但可能不够精确;多项式插值比较精确和光滑,但可能出现奇异或震荡现象。具体选择哪种方法,要根据数据的特点和目的来决定。
matlab中,可以使用 i n t e r p 2 interp2 interp2 函数或 g r i d d e d I n t e r p o l a n t griddedInterpolant griddedInterpolant 类来进行二维插值,它们都可以指定不同的插值方法。例如,如果已知的数据矩阵是 V {V} V,想要在 X q {Xq} Xq 和 Y q {Yq} Yq 的网格上进行插值,可以使用以下代码:
% 线性插值
Vq1 = interp2(V,Xq,Yq,'linear');
% B-样条插值
Vq2 = interp2(V,Xq,Yq,'spline');
% 多项式插值
Vq3 = interp2(V,Xq,Yq,'pchip');
拟合
根据插值得到的函数,寻找一个合适的数学模型,可以用一个简洁的表达式来近似描述数据的规律。
matlab提供了多种拟合方法,如线性回归、非线性回归、最小二乘法等。这些方法的原理和应用也各有不同,一般来说,线性回归比较简单和稳定,但可能不够灵活;非线性回归比较灵活和通用,但可能不够稳定;最小二乘法比较优化和精确,但可能不够简洁。具体选择哪种方法,要根据数据的分布和形状来决定。matlab中,可以使用 f i t fit fit 函数或 f i t t y p e fittype fittype 类来进行二维拟合,它们都可以指定不同的拟合方法。例如,如果插值得到的函数是 V q {Vq} Vq,想要用一个二次多项式来拟合,可以使用以下代码:
% 线性回归
ft1 = fittype('poly22'); % 二次多项式
f1 = fit([Xq(:),Yq(:)],Vq1(:),ft1); % 拟合
% 非线性回归
ft2 = fittype('a*exp(b*x)*sin(c*y)'); % 非线性函数
f2 = fit([Xq(:),Yq(:)],Vq2(:),ft2); % 拟合
% 最小二乘法
ft3 = fittype('a*x^2+b*y^2+c*x*y+d*x+e*y+f','problem','f'); % 二次多项式,f是固定参数
f3 = fit([Xq(:),Yq(:)],Vq3(:),ft3,'problem',0); % 拟合
拟合完成后,可以用 f1,f2,f3等变量来表示拟合得到的二维曲面方程,也可以用 c o e f f v a l u e s coeffvalues coeffvalues 函数来提取方程的系数。
例如,如果想要得到 f1的表达式,可以使用以下代码:
% 提取系数
c1 = coeffvalues(f1);
% 构造表达式
s1 = sprintf('V = %.4f*X^2 + %.4f*Y^2 + %.4f*X*Y + %.4f*X + %.4f*Y + %.4f',c1(1),c1(2),c1(3),c1(4),c1(5),c1(6));
拟合优度的评估
对于方程的拟合,如果要做可行性分析的话,那必然要对拟合优度进行评估。
拟合优度是一种衡量拟合结果与实际数据之间的差异的指标。拟合优度越高,说明拟合结果越能反映数据的真实情况。拟合优度的评估方法有很多种,常见的有残差分析、决定系数、均方根误差等。不同的评估方法有不同的含义和应用场景,比如残差分析可以检验拟合函数的合理性,决定系数可以衡量拟合函数对数据变化的解释程度,均方根误差可以衡量拟合函数的预测精度等。
具体实例的展开
下面,将以两种方法进行具体问题的求解。
B-样条插值+最小二乘法
B-样条插值法
B B B-样条(B-spline)是一种基于多项式的插值方法,它可以构造出平滑且连续的曲线或曲面。b-样条的优点是可以灵活地控制插值的阶数、节点、边界条件等,从而得到不同的插值效果。b-样条的缺点是计算量较大,且难以表示复杂的形状。
B B B -样条的数学定义如下:
设有 n + 1 n+1 n+1 个数据点 ( x i , y i ) \left(x_i,y_i\right) (xi,yi),其中 i = 0 , 1 , … , n i=0,1,\dots,n i=0,1,…,n ,且 x 0 < x 1 < ⋯ < x n x_0<x_1<\dots<x_n x0<x1<⋯<xn 。 B B B-样条插值法的目标是找到一个函数 f ( x ) f\left(x\right) f(x),使得 f ( x i ) = y i f\left(x_i\right)=y_i f(xi)=yi,对所有 i i i 成立,且 f ( x ) f\left(x\right) f(x) 在每个区间 [ x i , x i + 1 ] \left[x_i,x_{i+1}\right] [xi,xi+1] 上是一个 k k k 阶多项式,其中 k k k 是给定的插值阶数,通常为 3 3 3 或 4 4 4。
为了构造这样的函数,我们需要引入一个节点序列 t 0 , t 1 , … , t n + k t_0,t_1,\dots,t_{n+k} t0,t1,…,tn+k ,其中 t i t_i ti 是一个实数,且满足 t 0 ≤ t 1 ≤ ⋯ ≤ t n + k t_0\le t_1\le \dots\le t_{n+k} t0≤t1≤⋯≤tn+k。节点序列的作用是划分数据点的区间,并确定每个区间上的多项式的系数。根据节点序列,我们可以定义一组基函数 B i , k ( x ) B_{i,k}(x) Bi,k(x) ,其中 i = 0 , 1 , … , n , k = 1 , 2 , … i=0,1,\dots,n,k=1,2,\dots i=0,1,…,n,k=1,2,…,满足以下递推公式:
B
i
,
1
(
x
)
=
{
1
,
t
i
≤
x
<
t
i
+
1
0
,
otherwise
B_{i,1}(x)=\begin{cases}1,&t_i\le x<t_{i+1}\\0,&\text{otherwise}\end{cases}
Bi,1(x)={1,0,ti≤x<ti+1otherwise
B
i
,
k
(
x
)
=
x
−
t
i
t
i
+
k
−
1
−
t
i
B
i
,
k
−
1
(
x
)
+
t
i
+
k
−
x
t
i
+
k
−
t
i
+
1
B
i
+
1
,
k
−
1
(
x
)
B_{i,k}(x)=\frac{x-t_i}{t_{i+k-1}-t_i}B_{i,k-1}(x)+\frac{t_{i+k}-x}{t_{i+k}-t_{i+1}}B_{i+1,k-1}(x)
Bi,k(x)=ti+k−1−tix−tiBi,k−1(x)+ti+k−ti+1ti+k−xBi+1,k−1(x)
基函数 B i , k ( x ) B_{i,k}(x) Bi,k(x) 的意义是在节点序列 t i , t i + 1 , … , t_i,t_{i+1},\dots, ti,ti+1,…, 上的 k k k 阶 B B B -样条,它是一个非负的、分段的、最高为 k − 1 k-1 k−1 次的多项式,且在 [ t i , t i + 1 ] [t_i,t_{i+1}] [ti,ti+1]上为 1 1 1,在 [ t i + k − 1 , t i + k ] [t_{i+k-1},t_{i+k}] [ti+k−1,ti+k] 上为 0 0 0,在其他区间上线性变化。
基于基函数,我们可以将插值函数 f ( x ) f(x) f(x) 表示为:
f
(
x
)
=
∑
i
=
0
n
a
i
B
i
,
k
(
x
)
f(x)=\sum_{i=0}^n a_i B_{i,k}(x)
f(x)=i=0∑naiBi,k(x)
其中
a
i
a_i
ai 是待求的系数,它们可以通过解线性方程组
∑
i
=
0
n
a
i
B
i
,
k
(
x
j
)
=
y
j
\sum_{i=0}^n a_i B_{i,k}(x_j)=y_j
i=0∑naiBi,k(xj)=yj
对 j = 0 , 1 , … , n j=0,1,\dots,n j=0,1,…,n 得到。
这样,我们就得到了一个 B B B -样条插值函数 f ( x ) f(x) f(x) ,它可以在任意给定的 x x x 值处计算出对应的 y y y 值。
如果我们要得到一个二维曲面方程 f ( x , y ) f(x,y) f(x,y) ,我们可以先沿着 x x x 方向对每个 y y y 值进行 B B B -样条插值,得到一组函数
f i ( y ) = ∑ j = 0 n a i j B j , k ( x ) f_i(y)=\sum_{j=0}^n a_{ij} B_{j,k}(x) fi(y)=j=0∑naijBj,k(x)
其中 i = 0 , 1 , … , m , i=0,1,\dots,m, i=0,1,…,m,然后再沿着 y y y 方向对每个 x x x 值进行 B B B-样条插值,得到最终的函数
f ( x , y ) = ∑ i = 0 m f i ( y ) B i , k ( y ) f(x,y)=\sum_{i=0}^m f_i(y) B_{i,k}(y) f(x,y)=i=0∑mfi(y)Bi,k(y)
这样,我们就得到了一个双向的 B B B -样条插值曲面,它可以在任意给定的 ( x , y ) (x,y) (x,y) 值处计算出对应的 z z z 值。
lsqcurvefit 拟合法

接下来,介绍一种主要的最小二乘法的拟合算法在matlab里的应用—— l s q c u r v e f i t lsqcurvefit lsqcurvefit 拟合法。
l s q c u r v e f i t lsqcurvefit lsqcurvefit 是 MATLAB 中的一个函数,它可以用来对数据进行非线性曲线拟合。 l s q c u r v e f i t lsqcurvefit lsqcurvefit 的优点是可以灵活地指定拟合函数的形式,且可以考虑数据的误差和噪声。 l s q c u r v e f i t lsqcurvefit lsqcurvefit 的缺点是需要提供拟合函数的初始参数,且可能存在局部最优解的问题。
设有 n n n 个数据点 ( x i , y i ) (x_i,y_i) (xi,yi) ,其中 i = 1 , 2 , … , n i=1,2,\dots,n i=1,2,…,n ,且 x i x_i xi 和 y i y_i yi 可以是标量或向量。 l s q c u r v e f i t lsqcurvefit lsqcurvefit 的目标是找到一个函数 f ( x , a ) f(x,a) f(x,a) ,使得
∑ i = 1 n ∥ y i − f ( x i , a ) ∥ 2 \sum_{i=1}^n \|y_i-f(x_i,a)\|^2 i=1∑n∥yi−f(xi,a)∥2
最小,其中 a a a 是待求的参数向量,它可以有一些约束条件,比如上下界、线性或非线性不等式或等式。
为了求解这样的问题, l s q c u r v e f i t lsqcurvefit lsqcurvefit 使用了一种基于信赖域的迭代算法。
它的基本思想是在每一步,以当前的参数值为中心,构造一个信赖域,然后在信赖域内用一个二次模型来近似目标函数,求解该二次模型的最优解,作为下一步的参数值。这个过程重复进行,直到满足收敛条件或达到最大迭代次数。信赖域的大小会根据每一步的优化效果进行调整,以保证算法的稳定性和效率。
l s q c u r v e f i t lsqcurvefit lsqcurvefit 在具体编程的时候需要提供以下输入:
- fun:一个函数句柄,表示拟合函数 f ( x , a ) f(x,a) f(x,a) ,它接受两个输入参数,分别是自变量 x x x 和参数向量 a a a ,并返回一个输出值,表示因变量 y y y 。
- x0:一个向量,表示参数向量 a a a的初始值,它决定了算法的起始点,对于非线性问题,不同的初始值可能导致不同的最优解,所以应该尽量选择一个合理的初始值。
- xdata:一个向量或矩阵,表示自变量 x x x 的数据,它的大小应该与因变量 y y y 的数据相匹配。
- ydata:一个向量或矩阵,表示因变量 y y y 的数据,它的大小应该与自变量 x x x 的数据相匹配。
- lb:一个向量,表示参数向量 a a a 的下界,它的大小应该与参数向量 a a a 相同,如果没有下界,可以用 Inf 表示。
- ub:一个向量,表示参数向量 a a a 的上界,它的大小应该与参数向量 a a a 相同,如果没有上界,可以用 Inf 表示。
l s q c u r v e f i t lsqcurvefit lsqcurvefit 的输出是一个向量,表示参数向量 a a a 的最优值,它使得目标函数的平方和达到最小。
如果我们要得到一个二维曲面方程 f ( x , y , a ) f(x,y,a) f(x,y,a) ,我们可以先将自变量 x x x 和 y y y 组合成一个矩阵,然后将其作为 xdata 输入 l s q c u r v e f i t lsqcurvefit lsqcurvefit ,得到参数向量 a a a 的最优值,然后将其代入拟合函数 f ( x , y , a ) f(x,y,a) f(x,y,a) ,得到最终的函数 f ( x , y ) f(x,y) f(x,y) 。这样,我们就得到了一个非线性的曲面拟合方程,它可以在任意给定的 ( x , y ) (x,y) (x,y) 值处计算出对应的 z z z 值。
数学实现
为了演示插值和拟合的数学实现,使用一个示例数据矩阵,它包含了 x x x , y y y 位置方向的, u u u , v v v方向速度的洋流数据,大小为 50 × 50 50\times 50 50×50 。
这里,假设你的洋流数据是从官方网站下载的,所以我的这个算法就假设你直接 load 这个洋流数据文件。
读取数据矩阵,并提取 x , y , u , v x,y,u,v x,y,u,v 四个变量,分别表示位置和速度。这里我假设数据矩阵已经保存在一个名为 data.mat 的文件中,各位小伙伴们可以根据自己的实际情况修改文件名和路径哒。
load data.mat
x = data(:,1);
y = data(:,2);
u = data(:,3);
v = data(:,4);
将 x , y , u , v x,y,u,v x,y,u,v 四个变量转换为矩阵形式,以便进行插值和拟合。这里我假设 x , y x,y x,y 是均匀分布的,当然也可以根据自己的实际情况修改矩阵的大小和范围。
X = reshape(x,50,50);
Y = reshape(y,50,50);
U = reshape(u,50,50);
V = reshape(v,50,50);
计算 z z z 变量,表示速度的大小,它是 u , v u,v u,v 的平方和的开方。这个变量将作为插值和拟合的因变量,表示洋流的强度。
Z = sqrt(U.^2+V.^2);
使用 B B B -样条插值法,对 z z z 变量进行插值,得到一个二维曲面方程 f 1 ( x , y ) f_1(x,y) f1(x,y) 。
这里,我使用 MATLAB 的 C u r v e F i t t i n g T o o l b o x Curve Fitting Toolbox CurveFittingToolbox 中的 f i t fit fit 函数,指定插值方法为 ‘ b i h a r m o n i c i n t e r p ’ ‘biharmonicinterp’ ‘biharmonicinterp’,表示双向的三次 B B B -样条插值。也可以使用其他的插值方法,比如 ‘ t h i n p l a t e i n t e r p ’ ‘thinplateinterp’ ‘thinplateinterp’ ,表示双向的二次 B B B -样条插值,或者 ‘ l i n e a r i n t e r p ’ ‘linearinterp’ ‘linearinterp’,表示双向的线性插值。
f i t fit fit 函数的输出是一个 c f i t cfit cfit 对象,它包含了插值函数的信息,也可以使用 f e v a l feval feval 函数来计算插值函数在任意 ( x , y ) (x,y) (x,y) 值处的 z z z 值,或者使用 f o r m u l a formula formula 函数来查看插值函数的具体表达式。
注意,由于 b-样条插值函数是分段的,它的表达式可能很长,且难以理解,所以我不建议各位友友直接查看它的表达式,而是使用 f e v a l feval feval 函数来计算它的值。
f1 = fit([X(:),Y(:)],Z(:),'biharmonicinterp');
Z1 = feval(f1,X,Y);
接下来,使用 l s q c u r v e f i t lsqcurvefit lsqcurvefit 拟合法,对 z z z 变量进行拟合,得到一个二维曲面方程 f 2 ( x , y , a ) f_2(x,y,a) f2(x,y,a)。这里我假设拟合函数的形式为 f 2 ( x , y , a ) = a 1 sin ( a 2 x + a 3 y ) + a 4 cos ( a 5 x + a 6 y ) + a 7 f_2(x,y,a)=a_1\sin(a_2x+a_3y)+a_4\cos(a_5x+a_6y)+a_7 f2(x,y,a)=a1sin(a2x+a3y)+a4cos(a5x+a6y)+a7
,其中 a = ( a 1 , a 2 , a 3 , a 4 , a 5 , a 6 , a 7 ) a=(a_1,a_2,a_3,a_4,a_5,a_6,a_7) a=(a1,a2,a3,a4,a5,a6,a7) 是待求的参数向量。
当然,你也可以根据自己的实际情况修改拟合函数的形式,但请注意,拟合函数应该是非线性的,且能够较好地拟合数据的特征。
l s q c u r v e f i t lsqcurvefit lsqcurvefit 函数的输入包括拟合函数的函数句柄,参数向量的初始值,自变量和因变量的数据,参数向量的上下界等。 l s q c u r v e f i t lsqcurvefit lsqcurvefit 函数的输出是参数向量的最优值,它使得目标函数的平方和达到最小。
根据参数向量的最优值,我们可以得到拟合函数的具体表达式,也可以使用 f e v a l feval feval 函数来计算拟合函数在任意 ( x , y ) (x,y) (x,y) 值处的 z z z 值。
fun = @(a,xdata) a(1)*sin(a(2)*xdata(:,1)+a(3)*xdata(:,2))+a(4)*cos(a(5)*xdata(:,1)+a(6)*xdata(:,2))+a(7);
x0 = [1,1,1,1,1,1,1];
xdata = [X(:),Y(:)];
ydata = Z(:);
lb = [-Inf,-Inf,-Inf,-Inf,-Inf,-Inf,-Inf];
ub = [Inf,Inf,Inf,Inf,Inf,Inf,Inf];
a = lsqcurvefit(fun,x0,xdata,ydata,lb,ub);
Z2 = feval(fun,a,xdata);
Z2 = reshape(Z2,50,50);
f2 = @(x,y) a(1)*sin(a(2)*x+a(3)*y)+a(4)*cos(a(5)*x+a(6)*y)+a(7);
代码
接下来,是一个整个的代码实现。
% Load data matrix and extract variables
load data.mat
x = data(:,1);
y = data(:,2);
u = data(:,3);
v = data(:,4);
% Convert variables to matrix form
X = reshape(x,50,50);
Y = reshape(y,50,50);
U = reshape(u,50,50);
V = reshape(v,50,50);
% Calculate z variable as the magnitude of velocity
Z = sqrt(U^2+V^2);
% Use b-spline interpolation method to interpolate z variable and get a surface equation f1(x,y)
f1 = fit([X(:),Y(:)],Z(:),'biharmonicinterp'); Z1 = feval(f1,X,Y);
% Use lsqcurvefit fitting method to fit z variable and get a surface equation f2(x,y,a)
fun = @(a,xdata) a(1)*sin(a(2)*xdata(:,1)+a(3)*xdata(:,2))+a(4)*cos(a(5)*xdata(:,1)+a(6)*xdata(:,2))+a(7);
x0 = [1,1,1,1,1,1,1];
xdata = [X(:),Y(:)];
ydata = Z(:);
lb = [-Inf,-Inf,-Inf,-Inf,-Inf,-Inf,-Inf];
ub = [Inf,Inf,Inf,Inf,Inf,Inf,Inf];
a = lsqcurvefit(fun,x0,xdata,ydata,lb,ub);
Z2 = feval(fun,a,xdata);
Z2 = reshape(Z2,50,50);
f2 = @(x,y) a(1)*sin(a(2)*x+a(3)*y)+a(4)*cos(a(5)*x+a(6)*y)+a(7);
% Plot the original data, the interpolated surface, and the fitted surface
figure
subplot(1,3,1)
surf(X,Y,Z)
title('Original Data')
xlabel('x'),ylabel('y'),zlabel('z')
subplot(1,3,2)
surf(X,Y,Z1)
title('Interpolated Surface')
xlabel('x'), ylabel('y'),zlabel('z')
subplot(1,3,3)
surf(X,Y,Z2)
title('Fitted Surface')
xlabel('x'),ylabel('y'),zlabel('z')
% Compare the interpolation and fitting results with the original data % Calculate the mean squared error (MSE) and the coefficient of determination (R-squared) for each method
mse1 = mean((Z(:)-Z1(:)).^2);
mse2 = mean((Z(:)-Z2(:)).^2);
r1 = 1 - sum((Z(:)-Z1(:)).^2)/sum((Z(:)-mean(Z(:))).^2);
r2 = 1 - sum((Z(:)-Z2(:))^.2)/sum((Z(:)-mean(Z(:)))^.2);
fprintf('The MSE and R-squared for b-spline interpolation are: %.4f and %.4f\n',mse1,r1);
fprintf('The MSE and R-squared for lsqcurvefit fitting are: %.4f and %.4f\n',mse2,r2);
% Display the interpolation and fitting functions
fprintf('The interpolation function is: f1(x,y) = %s\n',formula(f1));
fprintf('The fitting function is: f2(x,y) = %s\n',formula(f2));
B-样条插值+非线性回归法
这个方法就不着重讲原理分析了,讲一下拟合评估怎么做,还附带讲一讲洋流的可视化。
数据的预处理
同样,假设你已经有了一个 50 × 50 50 \times 50 50×50 的二维数据矩阵,比如洋流数据矩阵,其中每个元素表示某个位置的洋流速度。为了进行插值和拟合,你需要将这个矩阵转换为三个向量,分别表示 x x x 坐标、 y y y 坐标和 z z z 值。可以使用 matlab 的 r e s h a p e reshape reshape 函数来实现这一转换:
% 假设 Z 是 50 x 50 的洋流数据矩阵
n = 50; % 矩阵的大小
x = repmat(1:n,1,n); % 重复 1 到 n,共 n 次,得到 x 坐标向量
y = reshape(repmat(1:n,n,1),1,n^2); % 重复 1 到 n,每个 n 次,然后转换为行向量,得到 y 坐标向量
z = reshape(Z,1,n^2); % 将 Z 转换为行向量,得到 z 值向量
% 假设 x, y, z 是已经转换好的三个向量,表示数据点的坐标和值
m = 100; % 网格的大小
xi = linspace(min(x),max(x),m); % 生成 x 方向的网格坐标
yi = linspace(min(y),max(y),m); % 生成 y 方向的网格坐标
[XI,YI] = meshgrid(xi,yi); % 生成网格矩阵
ZI = griddata(x,y,z,XI,YI,'cubic'); % 使用样条插值得到网格上的值
非线性回归的实现
为了使用 f i t fit fit 函数进行非线性回归,你需要指定拟合函数的形式和参数的初始值或范围。拟合函数的形式可以是一个匿名函数,也可以是一个字符串,表示函数的表达式。参数的初始值或范围可以是一个向量,也可以是一个矩阵,表示参数的下限和上限:
% 假设 x, y, z 是已经转换好的三个向量,表示数据点的坐标和值
f = @(a,b,c,d,x,y) a*x.^2 + b*y.^2 + c*x.*y + d; % 定义拟合函数的形式,这里是一个二次曲面
s = [1 1 1 1]; % 定义参数的初始值
f = fit([x,y],z,f,'StartPoint',s); % 使用非线性回归得到拟合结果
拟合优度的评估
前面已提及了拟合优度评估的原理,这里讲讲代码的实现。为了使用 f i t fit fit 函数的输出来评估拟合优度,你可以查看拟合结果的属性,其中包含了一些拟合优度的指标:
% 假设 f 是拟合结果
R2 = f.rsquare; % 得到决定系数
RMSE = f.rmse; % 得到均方根误差
disp(['R-squared = ',num2str(R2)]); % 显示决定系数
disp(['RMSE = ',num2str(RMSE)]); % 显示均方根误差
曲面方程的求解
为了使用 f i t fit fit 函数的输出来求解曲面方程,你可以使用 f f f 函数来计算任意位置的 z z z 值,或者使用 f e v a l feval feval 函数来计算网格上的 z z z 值:
% 假设 f 是拟合结果,XI, YI 是网格矩阵
z1 = f(10,20); % 计算 x = 10, y = 20 时的 z 值
z2 = feval(f,XI,YI); % 计算网格上的 z 值
disp(['z(10,20) = ',num2str(z1)]); % 显示 z(10,20) 的值
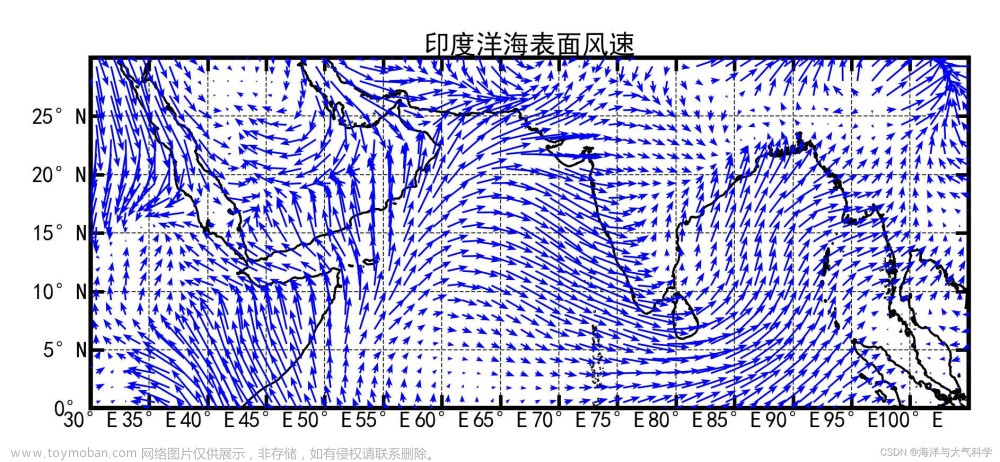
矢量场的绘制
对于洋流的可视化,因为洋流由 x , y , u , v x,y,u,v x,y,u,v 这四组向量组成,其中前两个定位洋流的每个坐标点的位置,后两个代表每个坐标点水平方向和竖直方向的速度,所以可以用矢量场来可视化,为了绘制矢量场,可以使用 q u i v e r quiver quiver 函数来绘制箭头,表示矢量的方向和大小。
在绘制的时候,需要指定箭头的起点和终点的坐标,以及箭头的颜色、线宽、比例等属性:
% 假设 XI, YI, ZI 是网格矩阵,表示插值后的数据
[U,V,W] = gradient(ZI); % 计算网格上的梯度,表示矢量的方向和大小
quiver3(XI,YI,ZI,U,V,W,'r','LineWidth',2,'AutoScaleFactor',0.5); % 绘制矢量场,使用红色的箭头,线宽为 2 ,比例因子为 0.5
xlabel('x'); % 标注 x 轴
ylabel('y'); % 标注 y 轴
zlabel('z'); % 标注 z 轴
title('Vector field of the fitted surface'); % 标注标题
尾声
本文由一个通用方法进行问题的介绍,然后,使用了两种组合方法进行具体问题求解的展开。
将二维数据矩阵转化为二维曲面方程有很多方法,可能本文的解答有局限,请多多见谅。
最后,祝君功不唐捐,玉汝于成!文章来源:https://www.toymoban.com/news/detail-847975.html
 文章来源地址https://www.toymoban.com/news/detail-847975.html
文章来源地址https://www.toymoban.com/news/detail-847975.html
参考
- MathWorks. (2021). Interpolate scattered data.
- MathWorks. (2021). Representing a matrix as a surface.
- Wikipedia contributors. (2024, March 2). Bilinear interpolation. In Wikipedia, The Free Encyclopedia. Retrieved 02:41, March 4, 2024.
- Kiusalaas, J. (2013). Interpolation in Two and Three Dimensions. In Numerical Methods in Engineering with Python 3 (pp. 97-122). Cambridge: Cambridge University Press. doi:10.1017/CBO9781139108278.006
- de Boor, C. (1978). Biharmonic spline interpolation. In A Practical Guide to Splines (pp. 211-247). New York: Springer-Verlag.
- MathWorks. (n.d.). Two-Dimensional Interpolation. Retrieved March 4, 2024.
- XlXtrFun. (n.d.). Excel 2D interpolation function. Retrieved March 4, 2024.
到了这里,关于全面地介绍 将二维数据矩阵插值拟合为二维曲面方程——基于matlab的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!