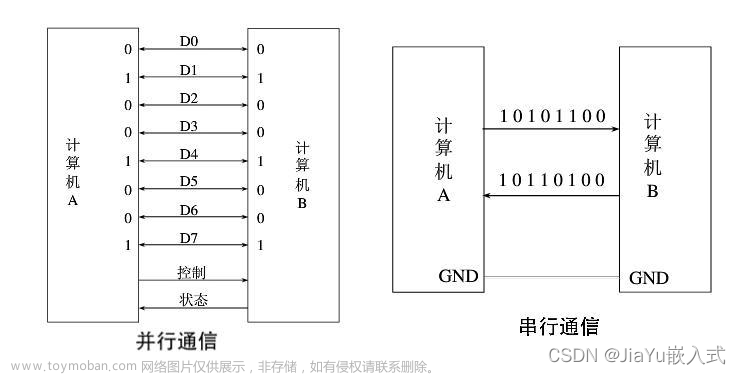
一、无线透传概述与应用
无线模块 (RF wireless module) ,是数字数传电台 (Digital radio)的模块化产品,是指借助DSP 技术和无线电技术实现的高性能专业数据传输电台模块。 无线模块延伸到很多的系统中,工业控制的开关量io设备,485无线传输设备dw-m1,模拟量采集和控制设备。从使用最早的按键电码、电报、模拟电台模块加无线MODEM,发展到数字电台模块和DSP、软件无线电;传输信号也从代码、低速数据(300~1200bps)到高速数据 (N64KNE1)。
E22-230T22S/30S/900T22S/T30S是全新一代的LoRa无线模块基于SEMTECH公司SX1262射频芯片的无线串口模块 (UART),具有多种传输方式,E22-230T22S/30S工作在(220.125~236.125MHz) 频段(默认230.125MHz),E22-900T22S/T30S工作在(850.125~930.125MHz)频段(默认868125MHz), LoRa扩频技术,TTL电平输出,兼容3.3V与5V的10口电压。E22-230T22S/30S/900T22S/T30S采用全新一代LoRa扩频技术,与传统SX1276方案相比,SX1262方案传输距离更远,可达5KM,速度更快,功耗更低,体积更小,支持空中唤醒无线配置、载波监听、自动中继、通信密钥等,功能,支持分包长度设定。
二、本文中使用的无线透传模块
LoRa模块(内置MCU)采用亿百特E22-400T22S与E22-400T30S,可实现广播监听、定点传输、搭配设计的PCB使用:

模块连接
三、配置步骤与程序讲解
1、模块配置
配置准备:准备好 E22 无线电台,将 M0 拨码开关拨至 0,M1 拨码开关拨至1,设置为配置模式(模式 2),如下图。(注:拨码开关带标识端(ON 端)为 0);
配置:打开配置软件 RF_Setting(E22-E9X(SL)) V2.8.exe,选择并打开串口,读取参数,此时会显示电台参数,修改参数后,点击写入参数即完成参数配置,如下图。(注:1、除频率信道外,其他参数均按下图配置,具体参数说明可参考产品手册;2、频率通道关系到两个电台的对频,因此需要将两个配对的电台均
设置为相同的频率通道(0~83),如图将两个电台的信道均设为5);
测试准备:将 M0 拨码开关拨至 0,M1 拨码开关也拨至 0,设置为一般模式(模式 0),如下图。(注:拨码开关带标识端(ON 端)为 0)
测试:两个电台均配置完成,且设为一般模式后,就能够正常地进行信号的发射和接收,通过串口调试助手 XCOM 进行测试,如图所示。
2、程序部分
透传数据:
初始化透传串口,采用结构体形式进行初始化:
透传接收处理:
//串口接收处理函数
/**
* @brief 接受收据数据帧解包
* @param R_data 逐个接收到的数据
pUSART: 串口号
* @retval : 解包状态
*/
void Xbee_ReceivedByte_SUART(u8 R_data, struct USART_TypeDefStruct *pUSART)
{
// IAP_Recieve(R_data);
Through_RecStringCmd(pUSART,R_data); //串口数据透传解析
switch (pUSART->RecvParse.R_state) //接收数据帧解包用的结构变量
{
case 0:
{
if (R_data == (u8)'$')
{
pUSART->RecvBuff[0] = R_data;
pUSART->RecvParse.R_state = 1;
pUSART->RecvParse.sum = R_data;
return ;
}
break;
}
case 1:
{
pUSART->RecvBuff[1] = R_data; // MASTER +SLAVER
pUSART->RecvParse.R_state++;
pUSART->RecvParse.sum += R_data;
return ;
}
case 2:
{
pUSART->RecvBuff[2] = R_data; // 功能码字节
pUSART->RecvParse.R_state++;
pUSART->RecvParse.sum += R_data;
return ;
}
case 3:
{
pUSART->RecvBuff[3] = R_data; // Rec Data Length; 字节长度
pUSART->RecvParse.R_state++;
pUSART->RecvParse.sum += R_data;
pUSART->RecvParse.p_rec_num = 4; //接收数据缓冲器指针
switch(pUSART->RecvBuff[2])
{
case 0x02:
pUSART->RecvParse.lenth_rec_num = 9; //lenth_rec_num 接收长度-1
break;
case 0x03:
case 0x07:
pUSART->RecvParse.lenth_rec_num = 7; //lenth_rec_num 接收长度-1
break;
default:
pUSART->RecvParse.lenth_rec_num = 7+R_data; //lenth_rec_num 接收长度-1
break;
}
return ;
}
case 4:
{
pUSART->RecvBuff[pUSART->RecvParse.p_rec_num++] = R_data;
if(pUSART->RecvParse.p_rec_num >= pUSART->RecvParse.lenth_rec_num)
{
pUSART->RecvParse.R_state = 5;
}
pUSART->RecvParse.sum += R_data;
return ;
}
case 5: //接收数据
{ // RecvBuff 接收的字符串缓冲器
pUSART->RecvBuff[pUSART->RecvParse.p_rec_num++] = R_data;
if(pUSART->RecvParse.sum == R_data) // 校验和通过
{
ReceivedComPortDataEvent(pUSART->RecvBuff,pUSART);
}
pUSART->RecvParse.R_state = 0;
return ;
}
default:
{
pUSART->RecvParse.R_state = 0;
return ;
}
}
pUSART->RecvParse.R_state = 0;
return ;
}
透传发送任务处理:
/**
* @brief 该函数必须1ms定时器中调用
* @param None
* @retval : None
*/
void CommProtocol_task(void)
{
if(N_1ms_EventUpData>0)
{
u8 i;
N_1ms_EventUpData = 0;
for(i=0;i<SIZEREPEATARRAY;i++)
{
if(RepeatArray[i].enable ==1) //发送使能
{
RepeatArray[i].n_1ms ++; //时间变量累加1ms
if(RepeatArray[i].n_1ms>=RepeatArray[i].period_ms) //时间到达发送定时周期
{
RepeatArray[i].n_1ms = 0; //时间变量复位,待发送数据帧进入收发缓冲池
SetSendBuffer(RepeatArray[i].pUSART,0xA2, //串口,功能码0XA2, 定时返回数据
OwnAddr,RepeatArray[i].objAddr, //发送者,接收者,发送者地址要根据程序作相应变动
RepeatArray[i].regaddr,RepeatArray[i].length, //基地址,字节长度
EE_ParaData.c+RepeatArray[i].regaddr,0); //发送的起始数据地址指针,返回标志
}
}
}
}
}
main函数
int main(void)
{
LED_Init(); //初始化与LED连接的硬件接口
CommProtocol_init(); //通信协议缓冲队列初始化,只是将数据帧缓冲队列中的发送使能标志清零
XBeeUsart_init(); //初始化电台的串口通信实例
UsartShow_init(); //GPS串口初始化
SystemIni();
SysTick_Config(SystemCoreClock / 1000); //1ms
SetContiuneDefaultData(); // 初始化向地面站连续发送数据的地址空间
while(1)
{
CommProtocol_task();
USART_Send_Task(&XBee_Usart); //向XBee串口发送任务
if(N_1ms_GPS_Watch>10)
{
N_1ms_GPS_Watch=0;
unPkg_GPS_task(); //解析GPS数据任务
}
EE_ParaData.name.Ki = rand()%100+1;
}
}
程序兼容STM32F1系列单片机,移植或直接使用工程即可,F4系列只需修改串口部分。以上程序只是主要的处理过程,有一些函数未给出,都包含在工程中。
3、上位机
安装:安装很简单,按照资料的安装步骤一步步安装即可,安装成功后打开我们的文件夹,如图箭头1所指JS-GCS.exe就是我们的上位机程序。
数据添加:将程序中的需要透传到上位机的数据添加到上图箭头2的飞鸿地址表中,如图,注意地址与H地址的填写,是根据字节长度来决定的。
添加完数据保存关闭,打开上位机,就可以看到我们所需要的数据,如图
上位机连接透传模块前,需要把T30S用数据线连接到电脑,T22S与单片机串口连接,然后如图选择对应的串口号,无线电变为绿色表示连接成功。
数据上传:这里用一个GPS来测试,把GPS数据发送到上位机观察,GPS解析如下,解析后赋值给透传的结构体,另外把生成一个0-100的随机数赋值给Ki:
/************************
* 解包GPS数据
*
*************************/
void unPkg_GPS_task(void)
{
char strtemp[50];
static u8 t = 0;
u8 i;
u8 length;
short tmp;
if(New_GPS_Packet==1)
{
New_GPS_Packet = 0;
N_1ms_GPS_Watch = 0;
//$GPGGA,050029.00,3202.2762,N,11848.9585,E,1,04,1.8,12.42,M,1.92,M,,*67
if((gps_head[0]=='G')&&(gps_head[1]=='G')&&(gps_head[2]=='A')) //GGA
{
p_stdio = 0;
if(getstr(Gpsstr)>0)
{
//EE_ParaData.name.GpsSol_iTow =Gpsstr[5]-'0';
}
if(getstr(strtemp)>0)
{
GPS_Latitude = getGPS_degree(strtemp);
EE_ParaData.name.GPS_avail = 1;
}
else
{
EE_ParaData.name.GPS_avail =0;
}
EE_ParaData.name.GPS_Latitude = GPS_Latitude;
getstr(strtemp); // 'N'
if(getstr(strtemp)>0)
GPS_Longitude = getGPS_degree(strtemp);
EE_ParaData.name.GPS_Longitude = GPS_Longitude;
getstr(strtemp); //'w'
if(getstr(strtemp)>0)
GPS_avail = atoi(strtemp);
if(getstr(strtemp)>0)
GPS_starnum = atoi(strtemp); //12
EE_ParaData.name.GPS_StarNum = GPS_starnum;
if(getstr(strtemp)>0)
GPSHdop = atof(strtemp); //15
if(getstr(strtemp)>0)
GPS_Altitude = atof(strtemp); //13
EE_ParaData.name.GPS_Altitude = GPS_Altitude;
}
if((gps_head[0]=='G')&&(gps_head[1]=='S')&&(gps_head[2]=='A')) //GSA
{
p_stdio = 0;
getstr(strtemp); // 模式
getstr(strtemp); // 定位类型
for(i=0;i<12;i++)
{
StarID[i] = 0xfe;
if(getstr(strtemp)>0)
StarID[i] = atoi(strtemp);
}
if(getstr(strtemp)>0)
Pdop = atof(strtemp);
if(getstr(strtemp)>0)
Hdop = atof(strtemp);
if(getstr(strtemp)>0)
Vdop = atof(strtemp);
EE_ParaData.name.GPS_Pdop = Pdop;
}
//#BESTVELA,COM1,0,75.0,FINESTEERING,729,18045.000,80000000,b748,1250;SOL_COMPUTED,DOPPLER_VELOCITY,0.150,0.000,0.0562,316.726716,0.1090,0.0*48f920de
if((gps_head[0]=='S')&&(gps_head[1]=='T')&&(gps_head[2]=='V')&(gps_head[3]=='E')&&(gps_head[4]=='L'))
{
p_stdio = 0;
t++;
if(t>=5)
{
// Beep();
t = 0;
}
while(str[p_stdio++] !=';') // 不处理分号前数据
{
if(p_stdio>=150) return;
}
getstr(strtemp); // get "SOL_COMPUTED"
getstr(strtemp); // get DOPPLER_VELOCITY
getstr(strtemp); // get latency
getstr(strtemp); // get age
if(getstr(strtemp)>0)
GPSSpeed[0] = atof(strtemp);
if(getstr(strtemp)>0)
GPSSpeed[1] = atof(strtemp);
if(getstr(strtemp)>0)
GPSSpeed[2] = atof(strtemp);
tmp= (short)(100*GPSSpeed[0]*cos(GPSSpeed[1]*deg_rad));
}
}
length = length;
}
数据观测与上位机使用,可以看到GPS数据已经上传到上位机,数据区与数据观测区是一个实时动态的数据,非常便于观测
数据修改,点击1位置弹出edit修改框,在修改值中输入我们需要的数值,例如这里输入5,然后点击保存
Kp变为5说明写入成功
我们到单片机上看仿真的数据也已经被修改
四、IAP功能
IAP,全名为in applacation programming,即在应用编程,与之相对应的叫做isp,in system programming,在系统编程,两者的不同是isp需要依靠烧写器在单片机复位离线的情况下编程,需要人工的干预,而iap则是用户自己的程序在运行过程中对User Flash 的部分区域进行烧写,目的是为了在产品发布后可以方便地通过预留的通信口对产品中的固件程序进行更新升级。在工程应用中经常会出现我们的产品被安装在某个特定的机械结构中,更新程序的时候拆机很不方便,使用iap技术能很好地降低工作量。不懂原理的小伙伴自行搜索哟。如图依次点击,选择bin文件,最后点击编程即可烧录到单片机。这部分程序后续会上传,BOOT和APP文件。 文章来源:https://www.toymoban.com/news/detail-848073.html
文章来源:https://www.toymoban.com/news/detail-848073.html
五、总结
该上位机配合E22透传模块使用,传输距离远,数据修改和观测数据非常方便,对无人车、无人机PID调试可以大大提高效率,PID调试时可以实时观测实际值与目标值的变化来快速整定PID参数,当然对其他的调试如需远程观察数据的项目来说也很方便。文章来源地址https://www.toymoban.com/news/detail-848073.html
到了这里,关于STM32无线透传、PID调试工具的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!