无人机飞行控制、导航和路径规划是无人机技术的核心组成部分,其原理和技术涉及多个学科领域。这些技术和算法的不断发展和优化,为无人机的应用和发展提供更强有力的支持。下面解释它们的原理、技术和相关算法。
飞行控制:
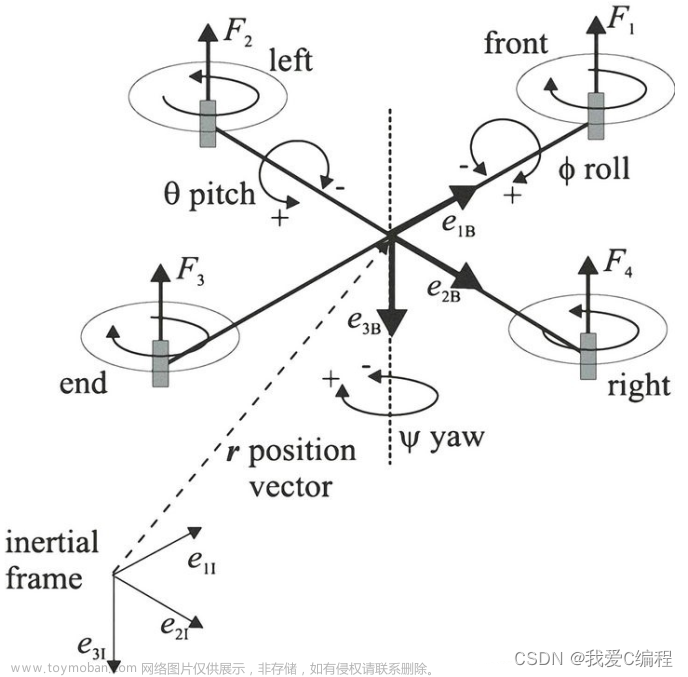
无人机飞行控制的基本原理是通过传感器检测无人机的飞行状态和环境信息,并将其反馈给控制器。控制器根据反馈信息和任务需求,计算出无人机的控制指令,并将其发送给执行机构。执行机构根据控制器的控制指令,调整无人机的飞行姿态和速度,实现对无人机的稳定控制。
飞行控制主要是通过无人机的控制系统,包括传感器、控制器和执行器,来保持无人机的稳定飞行、执行各种飞行动作和完成预设任务。控制系统通过传感器获取无人机的姿态、位置、速度等信息,然后根据这些信息计算出控制指令,通过执行器(如电机、舵机等)来实现对无人机的控制。传感器主要包括角速度传感器、加速度传感器、高度传感器等,用于检测无人机的飞行状态和环境信息。控制器主要包括飞行控制器、导航控制器等,用于根据传感器检测到的信息和任务需求,计算出无人机的控制指令。执行机构主要包括电机、螺旋桨、舵机等,用于根据控制器的控制指令,调整无人机的飞行姿态和速度。
飞行控制技术包括基于模型的控制、模糊控制、模式识别、神经网络控制等。这些技术都是为了使无人机能够更好地适应各种飞行环境和任务需求。
在飞行控制中,常用的算法有PID控制算法、模糊控制算法、自适应控制算法等。这些算法都是根据无人机的实际飞行状态和目标状态,通过不断调整控制参数,来实现对无人机的精确控制。
导航:
导航是指导无人机从起点飞到目标点的过程。无人机导航系统是无人机的重要组成部分,其主要功能是为无人机提供实时的位置信息和航向信息,以确保无人机能够准确地飞往目标位置。无人机导航系统主要包括卫星导航系统、惯性导航系统、地磁导航系统等。
卫星导航系统是利用卫星信号进行导航的一种方式,主要包括全球卫星导航系统(GPS)、中国北斗卫星导航系统(BDS)等。惯性导航系统是利用惯性传感器进行导航的一种方式,主要包括陀螺仪、加速度计等。地磁导航系统是利用地磁信号进行导航的一种方式,主要用于无人机在室内或地下等卫星信号较弱的环境下进行导航。无人机导航主要依赖于内部传感器和外部导航设备,如GPS、北斗等。当无人机在室内、隧道或地下等无法接收到GPS信号的地方时,就需要依赖惯性导航系统(INS)进行导航。
无人机导航的基本原理是通过多种导航方式的组合,实现对无人机的高精度导航。例如,在卫星导航系统的基础上,可以通过惯性导航系统进行辅助导航,以提高导航精度和稳定性。同时,无人机导航系统还需要考虑环境因素的影响,如磁场干扰、大气扰动等,以确保导航的准确性。
惯性导航系统是一种不依赖外界信息的自主式导航系统,它利用载体上的加速度计和陀螺仪等惯性元件,通过测量无人机的角运动和线运动信息,结合初始姿态、初始航向和初始位置等信息,推算出无人机的姿态、速度、航向和位置等导航参数。
在导航中,常用的算法有卡尔曼滤波算法、粒子滤波算法等。这些算法都是通过对无人机的各种传感器数据进行融合和处理,来提高导航的精度和稳定性。
路径规划:
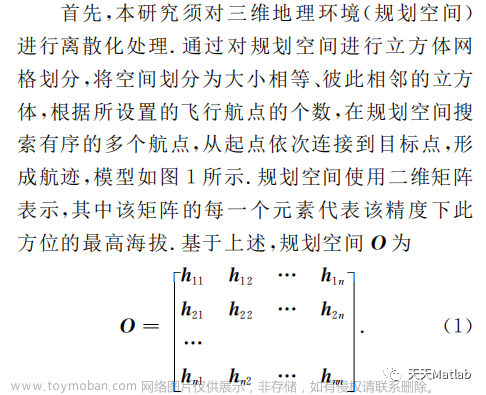
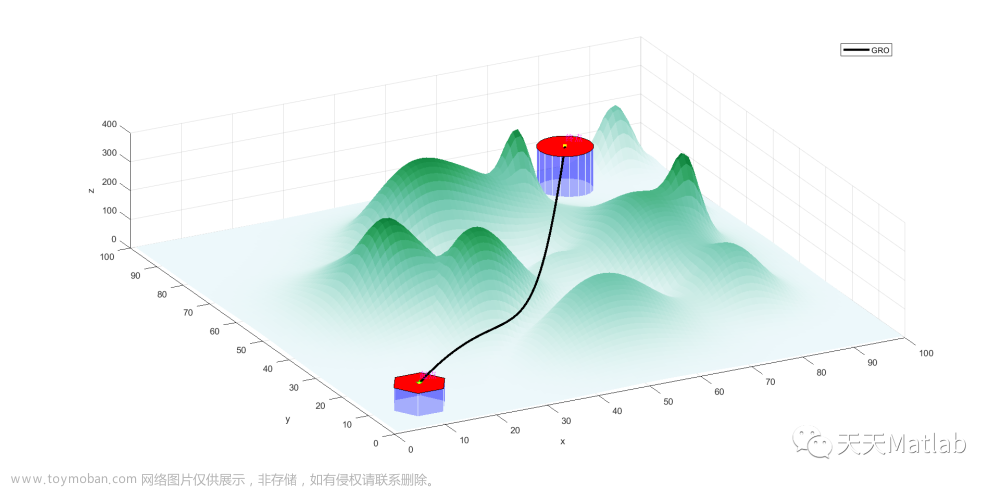
无人机路径规划是无人机的重要任务。常见的无人机路径规划算法包括A*算法、Dijkstra算法、人工势场法等。这些算法通过对环境地图进行分析,生成一个优化的路径,然后将其转化为航向和高度控制指令,指导无人机沿着预定路径飞行。
路径规划技术主要包括全局路径规划和局部路径规划。全局路径规划是在已知环境下,为无人机规划出一条从起点到终点的最优路径;而局部路径规划则是在未知或动态环境下,为无人机实时规划出一条避开障碍物的安全路径。
在路径规划中,常用的算法有快速随机树(RRT)算法、蚁群算法、遗传算法等。这些算法都是根据无人机的飞行环境和任务需求,通过搜索和优化算法,为无人机规划出一条最优或安全的路径。
无人机的路径规划算法在实际应用中可能会受到一些限制。以下是一些可能的限制因素:文章来源地址https://www.toymoban.com/news/detail-848630.html
- 环境复杂性:实际环境中的障碍物、地形、气象条件等可能非常复杂,这可能导致算法在处理这些复杂情况时出现困难。
- 计算资源:路径规划算法通常需要大量的计算资源,特别是在处理大规模环境或实时性要求较高的情况下。无人机的计算能力和内存资源可能有限,这可能限制算法的效率和精度。
- 传感器精度和可靠性:无人机依靠传感器来获取环境信息,但传感器的精度和可靠性可能受到多种因素的影响,如干扰、误差和故障等。这可能导致算法接收到不准确或不可靠的信息,从而影响路径规划的效果。
- 动态障碍物:实际环境中的障碍物可能是动态的,如移动的物体或其他无人机。算法需要能够快速响应和处理这些动态障碍物,以避免碰撞。
- 法律和规定:不同地区可能有不同的法律和规定限制无人机的飞行路径和区域。算法需要考虑这些限制,并确保无人机的飞行符合法规。
- 不确定性和干扰:实际环境中存在许多不确定性和干扰因素,如风力、电磁干扰等。这些因素可能会影响无人机的飞行性能和传感器的测量,从而对路径规划算法产生挑战。
文章来源:https://www.toymoban.com/news/detail-848630.html
到了这里,关于无人机飞行控制、导航和路径规划的原理、技术和相关算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!