2024 年 2 月,清华大学、华为和中科院联合发布的 VastGaussian 模型,实现了基于 3D Gaussian Splatting 进行大型场景高保真重建和实时渲染。
Abstract
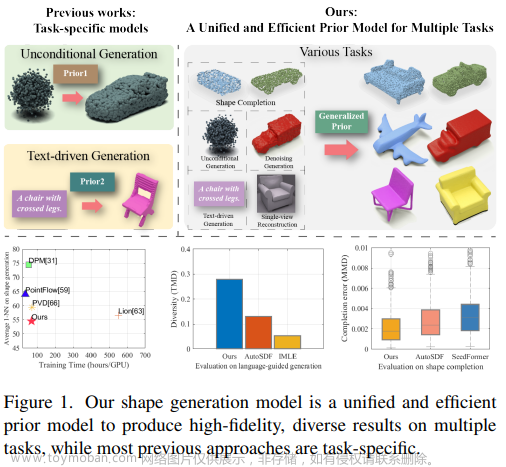
现有基于NeRF大型场景重建方法,往往在视觉质量和渲染速度方面存在局限性。虽然最近 3D Gaussians Spltting 在小规模和以对象为中心的场景中效果很好,但由于视频内存有限、优化时间长、外观变化明显,将其扩展到大型场景会带来挑战。为了应对这些挑战,我们提出了 VastGaussian,这是第一个基于 3D Gaussians Spltting 大型场景高质量重建和实时渲染方法。我们提出了一种渐进分割策略,将大型场景划分为多个单元,其中训练相机和点云根据空域感知可见度标准进行适当分布。在并行优化后,这些单元被合并为一个完整场景。我们还将解耦的外观建模引入到优化过程中,以减少渲染图像外观变化。我们的方法优于现有的基于NeRF方法,并在多个大型场景数据集上实现了最先进性能,实现了快速优化和高保真实时渲染。
Project page:https://vastgaussian.github.io.
Introduction
大型场景重建对于许多应用程序来说是必不可少的,包括自动驾驶、航空测量和虚拟现实,这需要逼真的视觉质量和实时渲染。Block-NeRF,Mega-NeRF,BungeeNeRF,Grid-NeRF,Switch-NeRF 等方法将神经辐射场NeRF扩展到大规模场景,但它们仍然缺乏细节或渲染缓慢。文章来源:https://www.toymoban.com/news/detail-848834.html
3D Gaussian Splatting (3DGS) ,作为一种很有前景的文章来源地址https://www.toymoban.com/news/detail-848834.html
到了这里,关于51-31 CVPR’24 | VastGaussian,3D高斯大型场景重建的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!