STM32的简单应用之循迹小车
前言
智能寻迹基于自动引导机器人系统,可以实现小车自动识别路线。智能寻迹小车运用传感器、单片机、电机驱动及自动控制等技术实现,管理时自动寻迹导航。该技术已经应用于无人驾驶机动车、无人工厂、仓库、服务机器人等多种领域。
本设计的完整的系统主要包括STM32单片机最小系统、L298n电机驱动、三路红外循迹模块。
本设计软件系统采用模块设计思想,采用C语言作为程序设计语言,通过KEI MDK完成程序设计,使用仿真器下载软件完成程序的烧录和在线调试。在系统硬件和软件系统都完成后,经过相应的软硬件测试后,通过搭建实验平台,逐步验证系统功能。最后,经过实际试验,验证了本系统具有很好的实用性和稳定性。
一、循迹小车的硬件模块有哪些?
本设计的完整的系统主要用到的硬件模块如下:
STM32C8T6核心板(一块)
L298N电机驱动(一个)
直流减速电机(四个)
三路红外循迹模块(一个)
12V供电电池(两节)
ST—LinkV2驱动(一个)
-
STM32C8T6核心板

STM32F103C8T6是一个中密度性能线,配有ARM Cortex-M3 32位微控制器,48路LQFP封装.它结合了高性能的RISC内核,运行频率可达72MHz,以及高速内嵌存储器,增强范围的强化输入/输出和外部连接至两个APB总线.STM32F103C8T6具有12位模数转换器,计时器,PWM计时器,标准和高级通讯接口.一套全面的省电模式允许设计者设计低功耗应用。 -
L298N电机驱动

 L298N电机驱动模块性能特点:
L298N电机驱动模块性能特点:
1:可实现电机正反转及调速。
2:启动性能好,启动转矩大。
3:工作电压可达到36V,4A。
4:可同时驱动两台直流电机。
5:适合应用于机器人设计及智能小车的设计。 -
直流减速电机

直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱。齿轮减速箱的作用是,提供较低的转速,较大的力矩。同时,齿轮箱不同的减速比可以提供不同的转速和力矩。这大大提高了,直流电机在自动化行业中的使用率。 -
三路红外循迹模块
 当小车在白色地面行驶时,装在车下的红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,输出端将输出低电平;当小车行驶到黑线时,红外线信号被黑色吸收后,将输出高电平,从而实现了通过红线检测信号的功能。将检测到的信号送到单片机的 I/O 口,当 I/O 口检测到的信号为高电平时,表明小车处在黑色的引线上;同理,当 I/O 口检测到的信号为低电平时,表明小车行驶在白色地面上。
当小车在白色地面行驶时,装在车下的红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,输出端将输出低电平;当小车行驶到黑线时,红外线信号被黑色吸收后,将输出高电平,从而实现了通过红线检测信号的功能。将检测到的信号送到单片机的 I/O 口,当 I/O 口检测到的信号为高电平时,表明小车处在黑色的引线上;同理,当 I/O 口检测到的信号为低电平时,表明小车行驶在白色地面上。
循迹模块用了三路采样,中间一个控制轨迹,两侧的用于检测道路的分支、弯道、交叉口等,布置如下:
-
STLinkV2驱动

ST-LINK/V2 是STM8 和STM32 微控制器系列的在线调试器 和编程器。 单线接口模块(SWIM)和串行线调试(SWD)接口用 于与应用板上的STM8 和STM32 微控制器通讯。
接线方式如下:
二、软件程序
1.头文件
time.h:
#ifndef __TIME_H
#define __TIME_H
void TIM3_PWM_Init(void);
#define IN1 PAout(6)
#define IN2 PAout(7)
#define IN3 PBout(0)
#define IN4 PBout(1)
#define L PBin(3)
#define M PBin(4)
#define R PBin(5)
void Forward(void);
void Rightward(void);
void Leftward(void);
void Stopward(void);
#endif
2.主函数:
time.c:
#include "stm32f10x.h"
#include "sys.h"
#include "time.h"
void TIM3_PWM_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0| GPIO_Pin_1; //定义电机引脚
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_Out_PP ; //推挽
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4| GPIO_Pin_5; //定义红外引脚
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6| GPIO_Pin_7;//定义电机引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period =99; //装入自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler =71; //设置TIM3的时钟预分频系数
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseStructure.TIM_ClockDivision=0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;//选择定时器模式:TIM脉冲宽度调制模式
TIM_OCInitStructure.TIM_OutputNState=TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse=0;
TIM_OC1Init(TIM3,&TIM_OCInitStructure);//初始化TIM3_OC1
TIM_OC2Init(TIM3,&TIM_OCInitStructure);//初始化TIM3_OC2
TIM_OC3Init(TIM3,&TIM_OCInitStructure);//初始化TIM3_OC3
TIM_OC4Init(TIM3,&TIM_OCInitStructure);//初始化TIM3_OC4
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能TIM3在oc1上的预装载寄存器
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能TIM3在oc2上的预装载寄存器
TIM_OC3PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能TIM3在oc3上的预装载寄存器
TIM_OC4PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能TIM3在oc4上的预装载寄存器
TIM_ARRPreloadConfig(TIM3,ENABLE);//使能TIM3的自动重装载寄存器
TIM_Cmd(TIM3,ENABLE);
}
void Forward(void)
{
TIM_SetCompare1(TIM1,100);
TIM_SetCompare2(TIM1,100);
TIM_SetCompare3(TIM1,100);
TIM_SetCompare4(TIM1,100);
IN1 =1;
IN2 =0;
IN3 =1;
IN4 =0;
}
void Rightward(void)
{
TIM_SetCompare1(TIM1,50);
TIM_SetCompare2(TIM1,50);
TIM_SetCompare3(TIM1,100);
TIM_SetCompare4(TIM1,100);
IN1 =1;
IN2 =0;
IN3 =0;
IN4 =1;
}
void Leftward(void)
{
TIM_SetCompare1(TIM1,100);
TIM_SetCompare2(TIM1,100);
TIM_SetCompare3(TIM1,50);
TIM_SetCompare4(TIM1,50);
IN1 =0;
IN2 =1;
IN3 =1;
IN4 =0;
}
void Stopward(void)
{
IN1 =0;
IN2 =0;
IN3 =0;
IN4 =0;
}
main.c:
#include "time.h"
#include "stm32f10x.h"
#include "sys.h"
int main()
{
TIM3_PWM_Init();
while(1)
{
if(L==0&&R==0)
Forward();
if(L==1&&R==0)
Leftward();
if(L==0&&R==1)
Rightward();
if(L==1&&M==1&&R==1)
Stopward();
}
}
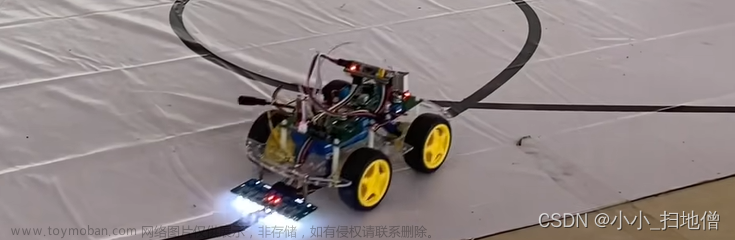
三、实物图

 文章来源:https://www.toymoban.com/news/detail-849352.html
文章来源:https://www.toymoban.com/news/detail-849352.html
以上即基于STM32嵌入式开发板的循迹小车的最终效果图。文章来源地址https://www.toymoban.com/news/detail-849352.html
到了这里,关于基于STM32开发板的循迹小车设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!