目录
一、 硬件原理图
二、 驱动程序
三、 应用程序
四、 Makefile
五、操作
一、 硬件原理图
又是非常经典的点灯环节 ,每次学新语言第一步都是hello world,拿到新板子或者学习新的操作系统,第一步就是点灯。
LED 的驱动方式,常见的有四种。
① 使用引脚输出 3.3V 点亮 LED,输出 0V 熄灭 LED。
② 使用引脚拉低到 0V 点亮 LED,输出 3.3V 熄灭 LED。
有的芯片为了省电等原因,其引脚驱动能力不足,这时可以使用三极管驱动。
③ 使用引脚输出 1.2V 点亮 LED,输出 0V 熄灭 LED。
④ 使用引脚输出 0V 点亮 LED,输出 1.2V 熄灭 LED。
由此,主芯片引脚输出高电平/低电平,即可改变 LED 状态,而无需关注 GPIO
引脚输出的是 3.3V 还是 1.2V。所以简称输出 1 或 0:
⚫ 逻辑 1-->高电平
⚫ 逻辑 0-->低电平
SOC级别的芯片通常电压都比较低,像我们之前用的exynos4412他是1.8V的,我们的i.MX6ULL则是可以做到更低的逻辑1,1.2V。现在最新的技术好像是0.8V的。电压降低的好处就是我们的功耗大幅减小。MCU为什么不降低呢,因为它是控制器需要高电压的驱动环境,所以一般都是3.3V和5V的。

这是板子上的LED的原理图


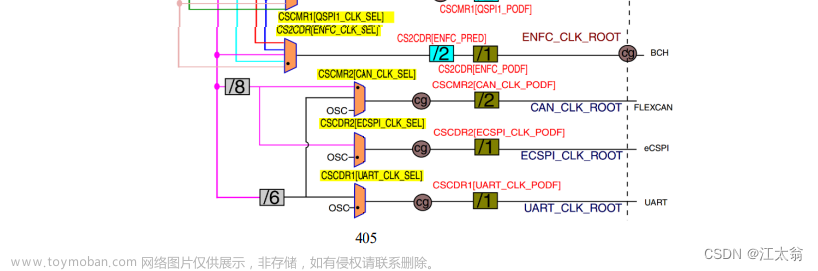
6ull的GPIO是这样描述的


看上面的原理图我找到了

第五组GPIO的第三个也就是4*32+4-1 = 131
每组GPIO有32个,我们0开始所以就是128+3 ,131就是我们的GPIO号
知道这个就差不多可以写驱动程序了,这就是由操作系统和无操作系统的区别,裸机开发的话我们还要找到其它的寄存器,上面说到的那八个都要找到,但是因为GPIO是通用外设,操作系统已经处理过了,所以我们用的话就会很轻松,甚至可以直接给dev下的GPIO设备写值来控制。
然后我们就可以写代码了
二、 驱动程序
#include "asm-generic/errno-base.h"
#include "asm-generic/gpio.h"
#include "asm/uaccess.h"
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
struct gpio_desc{
int gpio;
int irq;
char *name;
int key;
struct timer_list key_timer;
} ;
static struct gpio_desc gpios[2] = {
{131, 0, "led0", },
//{132, 0, "led1", },
};
/* 主设备号 */
static int major = 0;
static struct class *gpio_class;
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
char tmp_buf[2];
int err;
int count = sizeof(gpios)/sizeof(gpios[0]);
if (size != 2)
return -EINVAL;
err = copy_from_user(tmp_buf, buf, 1);
if (tmp_buf[0] >= count)
return -EINVAL;
tmp_buf[1] = gpio_get_value(gpios[tmp_buf[0]].gpio);
err = copy_to_user(buf, tmp_buf, 2);
return 2;
}
static ssize_t gpio_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
unsigned char ker_buf[2];
int err;
if (size != 2)
return -EINVAL;
err = copy_from_user(ker_buf, buf, size);
if (ker_buf[0] >= sizeof(gpios)/sizeof(gpios[0]))
return -EINVAL;
gpio_set_value(gpios[ker_buf[0]].gpio, ker_buf[1]);
return 2;
}
/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = gpio_drv_read,
.write = gpio_drv_write,
};
/* 在入口函数 */
static int __init gpio_drv_init(void)
{
int err;
int i;
int count = sizeof(gpios)/sizeof(gpios[0]);
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
for (i = 0; i < count; i++)
{
/* set pin as output */
err = gpio_request(gpios[i].gpio, gpios[i].name);
if (err < 0) {
printk("can not request gpio %s %d\n", gpios[i].name, gpios[i].gpio);
return -ENODEV;
}
gpio_direction_output(gpios[i].gpio, 1);
}
/* 注册file_operations */
major = register_chrdev(0, "100ask_led", &gpio_key_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "100ask_led_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_led_class");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "100ask_led"); /* /dev/100ask_gpio */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit gpio_drv_exit(void)
{
int i;
int count = sizeof(gpios)/sizeof(gpios[0]);
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "100ask_led");
for (i = 0; i < count; i++)
{
gpio_free(gpios[i].gpio);
}
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(gpio_drv_init);
module_exit(gpio_drv_exit);
MODULE_LICENSE("GPL");
三、 应用程序
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
static int fd;
//int led_on(int which);
//int led_off(int which);
//int led_status(int which);
/*
* ./led_test <0|1|2|..> on
* ./led_test <0|1|2|..> off
* ./led_test <0|1|2|..>
*/
int main(int argc, char **argv)
{
int ret;
char buf[2];
int i;
/* 1. 判断参数 */
if (argc < 2)
{
printf("Usage: %s <0|1|2|...> [on | off]\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open("/dev/100ask_led", O_RDWR);
if (fd == -1)
{
printf("can not open file /dev/100ask_led\n");
return -1;
}
if (argc == 3)
{
/* write */
buf[0] = strtol(argv[1], NULL, 0);
if (strcmp(argv[2], "on") == 0)
buf[1] = 0;
else
buf[1] = 1;
ret = write(fd, buf, 2);
}
else
{
buf[0] = strtol(argv[1], NULL, 0);
ret = read(fd, buf, 2);
if (ret == 2)
{
printf("led %d status is %s\n", buf[0], buf[1] == 0 ? "on" : "off");
}
}
close(fd);
return 0;
}
四、 Makefile
韦东山老师的makefile写的有点太潦草了,我们来优化一下
CC := $(CROSS_COMPILE)gcc
FILE_NAME = led_test
DRIVER_NAME = led_drv
# 定义NFS根文件系统目录
FS_FILE = ~/nfs_rootfs
KERN_DIR = /home/book/program/100ask_imx6ull_mini-sdk/Linux-4.9.88 # 板子所用内核源码的目录
# all:
# make -C $(KERN_DIR) M=`pwd` modules
# $(CROSS_COMPILE)gcc -o led_test led_test.c
# 默认目标
all:
@echo "Starting build process..."
@echo "Building kernel modules..."
make -C $(KERN_DIR) M=$(PWD) modules
@echo "Building $(FILE_NAME) test program..."
$(CC) -o $(FILE_NAME) $(FILE_NAME).c
# 安装目标
install:
@echo "Installing $(DRIVER_NAME).ko to $(FS_FILE)..."
cp ./$(DRIVER_NAME).ko $(FS_FILE)
@echo "$(DRIVER_NAME).ko installed."
@echo "Installing $(FILE_NAME) to $(FS_FILE)..."
cp ./$(FILE_NAME) $(FS_FILE)
@echo "$(FILE_NAME) installed."
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order led_test
# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.o
obj-m += led_drv.o
# 声明伪目标
.PHONY: all clean install五、操作

每次都要重新配置网络很难受所以我这面写了个脚本上机自动配置ip并且挂载nfs
#!/bin/bash
# 定义变量
NFS_SERVER="192.168.5.10"
NFS_SHARE="/home/book/nfs_rootfs"
IPADDR="192.168.5.110"
MOUNT_POINT="/mnt"
INTERFACE="eth0"
# 设置本机IP
sleep 1
ifconfig $INTERFACE $IPADDR
sleep 1
# 测试与NFS服务器的连通性
ping -c 1 $NFS_SERVER > /dev/null 2>&1
if [ $? -eq 0 ]; then
echo "NFS服务器 $NFS_SERVER 连通性正常"
else
echo "无法与NFS服务器 $NFS_SERVER 建立连接"
exit 1
fi
# 检查挂载点是否存在,如果不存在则创建
if [ ! -d "$MOUNT_POINT" ]; then
mkdir -p "$MOUNT_POINT"
fi
# 尝试挂载NFS共享
mount -t nfs -o nolock,vers=3 $NFS_SERVER:$NFS_SHARE $MOUNT_POINT
if [ $? -eq 0 ]; then
echo "NFS共享已成功挂载到 $MOUNT_POINT"
else
echo "无法挂载NFS共享到 $MOUNT_POINT"
exit 1
fi
最后我们上传一下
 文章来源:https://www.toymoban.com/news/detail-849398.html
文章来源:https://www.toymoban.com/news/detail-849398.html
 文章来源地址https://www.toymoban.com/news/detail-849398.html
文章来源地址https://www.toymoban.com/news/detail-849398.html
到了这里,关于012——LED模块驱动开发(基于I.MX6uLL)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!