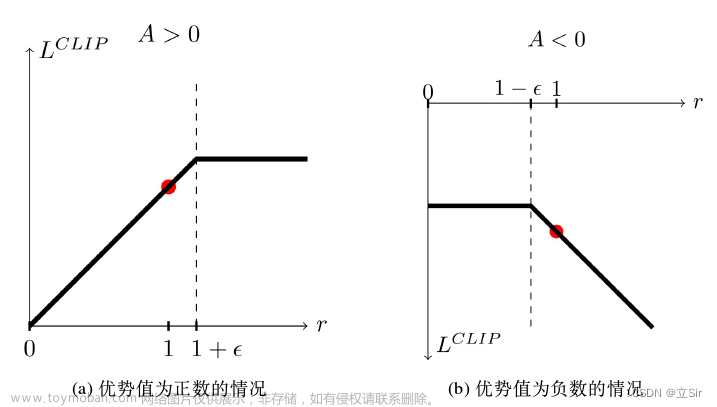
在之前的文章里介绍了 PPO 之 Clipped Surrogate Objective 篇,提出了现有方法存在方差较大的缺点,今天我们介绍一下如何使用 GAE(Generalized Advantage Estimation)进行改进。
回顾
上文提到的 Surrogate Objective:
R ˉ θ ≈ E τ ∼ q θ ′ ( τ ) [ p θ ( a t ∣ s t ) q θ ′ ( a t ∣ s t ) R ( τ ) ] \bar{R}_{\theta} \approx E_{\tau\sim q_{\theta'}(\tau)}[\frac{p_\theta(a_{t}|s_{t})}{q_\theta'(a_{t}|s_{t})}R(\tau)] Rˉθ≈Eτ∼qθ′(τ)[qθ′(at∣st)pθ(at∣st)R(τ)]
我们的目标是使得这个期望回报最大。
算法描述
如果一次 rollout 的回报均值是 100,一次的是 90,我们就能说这两次 rollout 的效果都不错嘛?当然不能,如果理论上的最大期望回报是 1w,那么这两次 rollout 都有很大的提升空间,所以我们需要引入基准来做参考。
优势估计(AE)
如何引入基准呢?由深度强化学习(DRL)算法 附录1 —— 贝尔曼公式,期望回报实际上就是 Q,每次 rollout 是对 Q 的一次采样,那么我们可以定义优势 A = Q - V(Advantage)。
由于现在的 Q 使用的 MC 方法表示,所以方差大,可以引入 bootstrap 的方法减小方差,如 TD,那么对 Advantage 的一次采样为:
a d v a n t a g e = r + γ v ( s t + 1 ) − v ( s t ) advantage = r + γv(s_{t+1})- v(s_t) advantage=r+γv(st+1)−v(st)
那么通过 PG 的方法,可以使得 advantage 大的
p
θ
(
a
t
∣
s
t
)
p_\theta(a_{t}|s_{t})
pθ(at∣st)
增大,从而改进策略。但是注意这里
p
θ
(
a
t
∣
s
t
)
p_\theta(a_{t}|s_{t})
pθ(at∣st)
使用的是神经网络,我们还需要一个神经网络来表示 v。所以 ppo 里有两个神经网络,一个扮演 actor 的角色决定 action,一个扮演 critic 的角色估计 v 值,来判定 actor 的好坏。
所以除了 Surrogate Objective 的 loss,我们还需要 critic 网络的 loss(使用最小二乘估计),直觉上我们希望模型的探索性得到提升,那么可以借助 actor 网络输出的交叉熵。
那么我么可以假设采样一次的 loss 是:pgloss - c1v_loss + c2entropy_loss,为了让 loss 最大,我们需要提高 pgloss,减小 v_loss,增大 entropy_loss,满足我们希望 A 越大
p
θ
(
a
t
∣
s
t
)
p_\theta(a_{t}|s_{t})
pθ(at∣st)
越大,使得 v 值越来越准确,模型的探索性得到提升的视觉,实际上如果把 AE 替换成 GAE,那么这就是 PPO 论文里的 Loss function:
L
t
C
L
I
P
+
V
F
+
S
(
θ
)
=
E
^
t
[
L
t
C
L
I
P
(
θ
)
−
c
1
L
t
V
F
(
θ
)
+
c
2
S
[
π
θ
]
(
s
t
)
]
L_t^{C L I P+V F+S}(\theta)=\hat{\mathbb{E}}_t\left[L_t^{C L I P}(\theta)-c_1 L_t^{V F}(\theta)+c_2 S\left[\pi_\theta\right]\left(s_t\right)\right]
LtCLIP+VF+S(θ)=E^t[LtCLIP(θ)−c1LtVF(θ)+c2S[πθ](st)]
广义优势估计(GAE)
上面的 AE 算法采用 one-step TD 来描述 advantage,我们都知道 TD 算法虽然会减小方差,但是也增大了偏差,所以这就像两个极端,MC 方差最大,one-step TD 偏差最大,有没有一种方法,可以提供一种 trade-off,而且可以很方便的调节这种 trade-off 呢?
我们具体来看,用一些数学技巧:
one-step advantage:
δ
t
=
r
t
+
γ
v
(
s
t
+
1
)
−
v
(
s
t
)
\delta_t = r_t + γv(s_{t+1})- v(s_t)
δt=rt+γv(st+1)−v(st)
two-step advantage:
δ
t
+
γ
δ
t
+
1
=
r
t
+
γ
r
t
+
1
+
γ
2
v
(
s
t
+
2
)
−
v
(
s
t
)
\delta_t + \gamma \delta_{t+1} = r_t + \gamma r_{t+1} +γ^2v(s_{t+2})- v(s_t)
δt+γδt+1=rt+γrt+1+γ2v(st+2)−v(st)
∞
\infty
∞ -step advantage:
∑
l
=
0
∞
γ
l
δ
t
+
l
=
∑
l
=
0
∞
γ
l
r
t
+
l
−
v
(
s
t
)
\sum_{l=0}^{\infty} \gamma^l \delta_{t+l} = \sum_{l=0}^{\infty} \gamma^l r_{t+l} - v(s_t)
∑l=0∞γlδt+l=∑l=0∞γlrt+l−v(st)
加下来我们尝试构造权重:
one-step 权重:
1
−
λ
1 - \lambda
1−λ
two-step 权重:
λ
\lambda
λ (1 -
λ
\lambda
λ)
three-step 权重:
λ
2
λ^2
λ2 (1-
λ
\lambda
λ)
然后进行加权平均则有 advantage 的 GAE 表示[3]:
a
d
v
a
n
t
a
g
e
G
A
E
=
∑
l
=
0
∞
(
γ
λ
)
l
δ
t
+
l
\begin{aligned} advantage^{\mathrm{GAE}} = & \sum_{l=0}^{\infty}(\gamma \lambda)^l \delta_{t+l} \end{aligned}
advantageGAE=l=0∑∞(γλ)lδt+l (ppo 使用时,
∞
\infty
∞ 变成 T)
当
λ
\lambda
λ= 0 时,advantage 的 GAE 表示退化成 one-step TD
当
λ
\lambda
λ= 1 时,advantage 的 GAE 表示退化成 MC
所以当
λ
\lambda
λ在 (0,1)区间时,表示在偏差和方差之间做出折衷。文章来源:https://www.toymoban.com/news/detail-849541.html
总结
到这里,PPO 算法相关的细节就讲完了,但是 PPO 的代码实现上还有许多细节,可以参考 cleanrl 是目前我看过的可读性最好的 ppo 代码实现,对具体实现感兴趣的可以看下这个 repo。接下来的文章会介绍 DRL 其他的常用算法,如 DDPG、SAC 等。
感谢阅读。文章来源地址https://www.toymoban.com/news/detail-849541.html
参考
- https://github.com/DLR-RM/stable-baselines3/pull/375
- https://arxiv.org/abs/1707.06347
- https://arxiv.org/abs/1506.02438
到了这里,关于深度强化学习(DRL)算法 2 —— PPO 之 GAE 篇的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!