目录
前言
一、什么是CFAR算法?
二、CFAR算法的基本原理
三、实现2D-CFAR算法的示例
四、MATLAB仿真结果
前言
雷达技术在军事、航空、气象等领域扮演着至关重要的角色,而在雷达信号处理中,恒虚警率(CFAR)算法被视为一种重要的工具,用于检测信号中的目标并过滤掉噪声。本文将带领读者深入探讨CFAR算法,从其基本原理到实际应用,帮助读者更好地理解和运用这一在雷达技术中至关重要的算法。
雷达系统常常面临着噪声的干扰,而目标的检测和识别又至关重要。CFAR算法作为一种自适应的目标检测算法,能够在不同信号背景下保持恒定的虚警率,为雷达系统提供了强大的信号处理能力。在本文中,我们将详细介绍CFAR算法的原理和实现方法,并通过一个简单的二维CFAR示例MATLAB代码来演示其工作过程。
一、什么是CFAR算法?
CFAR(Constant False Alarm Rate,恒虚警率)算法是一种在雷达信号处理中常用的目标检测技术。它的设计目的是在保持恒定虚警率的前提下,有效地检测出目标信号并过滤掉背景噪声。
在雷达系统中,信号通常受到来自目标、地形、气象等多种因素的影响,同时还会受到噪声的干扰。因此,为了准确地检测目标并降低误报率,需要一种自适应的算法来适应不同信号背景下的情况,这就是CFAR算法的用武之地。
CFAR算法的基本原理是通过在目标检测区域周围的保护区域内计算信号的统计属性(如均值或中值),然后使用这些属性来设置检测门限。如果目标信号的强度超过了门限值,那么就认为该区域存在目标。而恒虚警率这一概念则保证了在不同背景下虚警率保持不变,从而提高了算法的适用性和鲁棒性。
二、CFAR算法的基本原理
CFAR(Constant False Alarm Rate,恒虚警率)算法的基本原理是在给定的信号背景下,计算局部环境的统计特性,并使用这些特性来确定目标是否存在。其核心思想是在保护区域内计算信号的统计属性(例如均值或中值),并将这些属性用作检测门限的参考值。
下面是CFAR算法的基本步骤:
-
定义保护区域和检测区域:首先,需要确定一个用于计算统计属性的保护区域和一个用于目标检测的检测区域。保护区域通常位于目标周围,用于估计信号背景的统计特性。
-
计算统计属性:在保护区域内计算信号的统计属性,例如均值或中值。这些统计属性反映了信号背景的特征,可以作为检测门限的参考值。
-
设置检测门限:根据保护区域内计算得到的统计属性,结合预先定义的虚警率(即误报概率),设置检测门限。通常,门限会根据统计属性乘以一个因子来确定。
-
目标检测:在检测区域内,将接收到的信号与设置的检测门限进行比较。如果信号强度超过门限,则判定为目标存在;否则,认为是噪声或背景信号。
-
调整门限:根据实际情况,动态调整门限以适应不同的信号背景。这个步骤使得CFAR算法能够在不同环境下保持恒定的虚警率,提高了算法的鲁棒性和适用性。
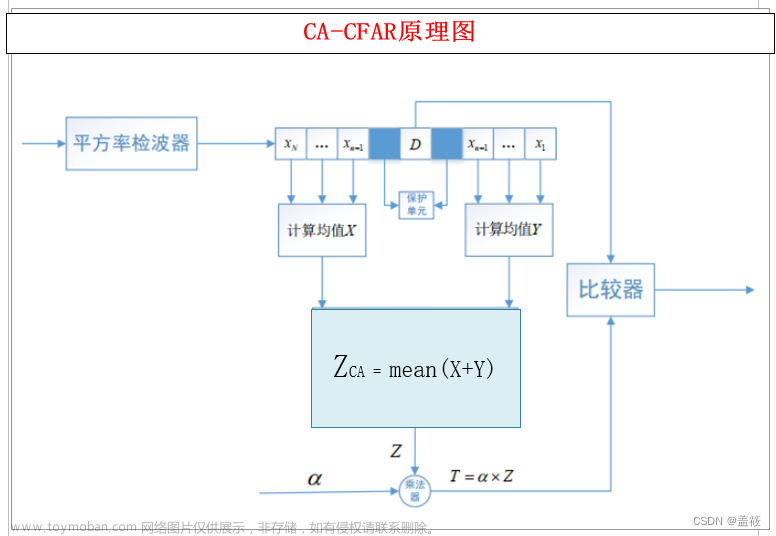
CA-CFAR原理图如图1所示:
三、实现2D-CFAR算法的示例
代码如下:
% 参数设置
N = 500; % 数据点数量
M = 30; % 保护单元数量
guard_cells = M; % 保护单元数
threshold_factor = 3.0; % 门限因子
% 生成模拟雷达信号数据(包含目标和噪声)
noise = randn(N, N); % 高斯噪声
noise1 = randn(N, N)+3; % 高斯噪声
target_center = [50, 50]; % 目标中心坐标
target_amplitude = 10; % 目标幅度
[x, y] = meshgrid(1:N, 1:N);
signal = zeros(N, N);
signal((x - target_center(1)).^2 + (y - target_center(2)).^2 < 100) = target_amplitude;
received_signal = signal + noise1;
% 二维 CFAR 算法
detected_targets = zeros(N, N);
for i = guard_cells + 1 : N - guard_cells
for j = guard_cells + 1 : N - guard_cells
% 在保护单元范围内计算平均信号强度
sum_guard = sum(sum(received_signal(i-guard_cells:i+guard_cells, j-guard_cells:j+guard_cells)));
average_guard = sum_guard / ((2*guard_cells + 1)^2);
% 计算门限
threshold = threshold_factor * average_guard;
% 检测是否超过门限
if received_signal(i, j) > threshold
detected_targets(i, j) = 1;
end
end
end
% % 绘制原始信号和检测结果
% figure(1);
% subplot(2, 1, 1);
% imagesc(received_signal);
% title('Received Signal');
%
% subplot(2, 1, 2);
% imagesc(detected_targets);
% title('Detected Targets');
% colormap(gray);
figure(2)
stem3(noise1,"filled");
xlabel('X');
ylabel('Y');
zlabel('Z');
title('高斯噪声加偏置信号')
figure(3)
stem3(signal,"filled");
xlabel('X');
ylabel('Y');
zlabel('Z');
title('源信号')
figure(4)
stem3(received_signal,"r*");
xlabel('X');
ylabel('Y');
zlabel('Z');
title('接收的信号')
figure(5)
stem3(detected_targets,"r*");
xlabel('X');
ylabel('Y');
zlabel('Z');
title('cfar检测出来的信号')
代码详细解释
- 首先,这段代码通过设置参数来定义了数据点数量(N)、保护单元数量(M)、门限因子(threshold_factor)等。接着,使用randn函数生成了两个500x500的高斯噪声数据(noise和noise1),并生成了一个包含目标的模拟雷达信号数据(signal)。其中,目标位于中心坐标为(50,50)的位置,具有幅度为10。
- 接收到的信号(received_signal)是原始信号加上噪声信号的结果。
- 然后,进入二维CFAR算法的实现部分。在嵌套的for循环中,对于每个数据点,计算了其周围保护单元内信号强度的平均值(average_guard),然后根据门限因子(threshold_factor)计算了门限值(threshold)。如果接收到的信号强度超过了门限值,则将该点标记为检测到的目标(detected_targets)。
- 最后,使用stem3函数对高斯噪声加偏置信号、源信号、接收的信号以及CFAR检测出的目标信号进行了三维柱状图的可视化展示。
四、MATLAB仿真结果
目标信号:目标位于中心坐标为(50,50)的位置,具有幅度为10。

高斯噪声数据

接收到的信号文章来源:https://www.toymoban.com/news/detail-849642.html

CFAR检测出的目标信号文章来源地址https://www.toymoban.com/news/detail-849642.html

到了这里,关于毫米波雷达-2D-CFAR算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!