驱动
裸机驱动:51——>s3c2440——>linux
Linux驱动
寄存器:全局变量
位运算
&:按位与 :指定位置0
| :按位或 :指定位置1
^ :按位异或 : 指定位翻转
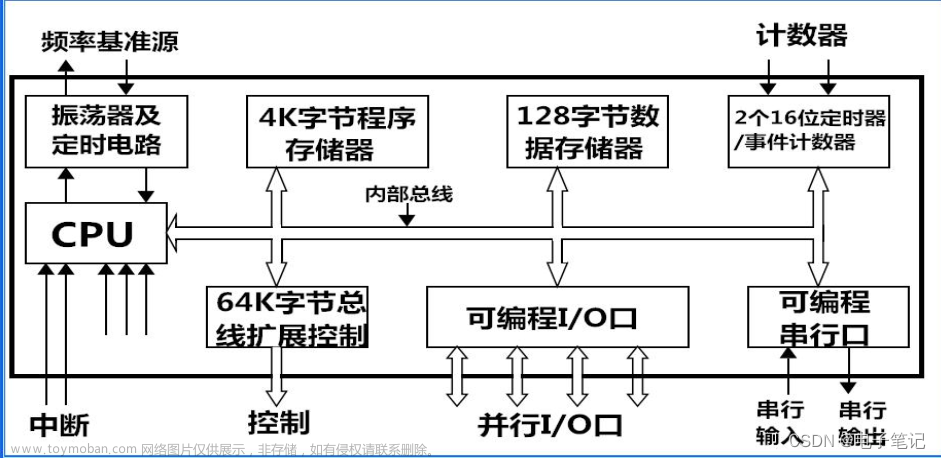
MCU:是一种集成了处理器、存储器、输入/输出接口和其他外设的单芯片计算机系统。MCU通常用于嵌入式系统中,如智能家居、智能手表、机器人和小型电子设备等。MCU中包含了CPU(Central Processing Unit,中央处理器),但MCU还包含了其他外围设备,如定时器、通信接口、模拟数字转换器等。所以,MCU是一种包含了CPU和其他外围设备的芯片。
MPU:是一种CPU,它通常被嵌入到嵌入式设备中,如汽车电子系统、家用电器、工业控制器和医疗设备等。MPU通常集成了处理器、存储器和输入/输出接口等基本功能,但缺少其他外设如通信接口和控制器等
CPU:计算机系统的主要处理器,它负责执行指令、处理数据和控制计算机系统的操作。CPU通常被用于通用计算和控制任务,如桌面电脑、服务器和智能手机等
GPU:是专门用于处理图形和图像的处理器。它主要用于电子游戏、计算机辅助设计(CAD)和科学计算等需要大量图形和图像处理的领域。
ram:
作用: 用于临时存储计算机正在运行的程序和数据。当计算机启动时,操作系统和其他必要的程序会被加载到RAM中,以便 CPU(中央处理器)能够快速访问这些数据。
特性:
易失性: RAM是易失性存储器,意味着当计算机断电时,其中的数据会丢失。
随机存取: 可以随机访问RAM中的任何位置,而不必按照顺序逐个访问。
快速读写: RAM的读写速度相对较快,这有助于提高计算机的整体性能。
rom:
作用: 主要用于存储计算机的固件(firmware)和永久性的系统程序。固件是一种永久性存储的程序,通常用于启动计算机和初始化硬件。
特性:
非易失性: ROM是非易失性存储器,即使在断电的情况下,其中的数据仍然保持不变。
只读: 一旦数据被存储在ROM中,通常就不能被用户修改,这是为了保护存储的固件和系统程序不受意外更改。
顺序访问: 数据通常按照预定的顺序进行访问,而不像RAM那样可以随机访问
中断
1、什么中断?
中断系统是为使CPU具有对外界紧急事件的实时处理能力而设置的。
当中央处理机CPU正在处理某件事的时候外界发生了紧急事件请求,要求CPU暂停当前的工作,转而去处理这个紧急事件,处理完以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。
2、什么是中断源?
实现这种功能的部件称为中断系统,请示CPU中断的请求源称为中断源。微型机的中断系统一般允许多个中断源,当几个中断源同时向CPU请求中断,要求为它服务的时候,这就存在CPU优先响应哪一个中断源请求的问题。通常根据中断源的轻重缓急排队,优先处理最紧急事件的中断请求源,即规定每一个中断源有一个优先级别。CPU总是先响应优先级别最高的中断请求。
3、什么是中断向量表?
中断向量表就是中断向量的列表。
中断向量表在内存中保存,其中存放着中断源(中断向量号或者中断类型号)所对应的中断处理程序的入口地址。
一个中断源对应一个中断处理程序,这种关系索引表,就是中断向量表。
4、中断的执行流程是什么?
请求中断——中断优先级判断——中断处理
PWM
全双工
全双工就是能同时互通消息。两者能同步进行,这好像我们平时打电话—样,说话的同时也能够听到对方的声音。目前的网卡─般都支持全双工。
网线。在全双工下,网线8根线都要分别接到水晶头相应的线序位置上。网线最大可以达到100兆以上的速度。
RS232为全双工。在全双工模式下,每端有一个发送器和一个接收器,并有两条传输线,可用于交互式应用和信息传输效率高的远程监控系统。
半双工
半双工就是指—个时间段内只有一个动作发生,只支持异步通信。如一条窄窄的马路,同时只能有一辆车通过,当目前有两量车对开,这种情况下就只能让—辆车先过,等到头儿后另一辆车再过。早期的对讲机、以及早期集线器等设备都是基于半双工的产品。
网线。在半双工下,只需接4根线。网线能达到的速度通常为10兆。
RS485为半双工。在半双工通信中,每端需要有—个电子开关来进行接收/发送切换,它通过切换来确定数据传输的方向。因为有切换,所以会有时间延迟,信息传输效率会降低。但是,对于打印机等单向传输的外围设备,半双工模式可以满足要求,而不是全双工模式,可以节省传输线。
单工
单工通信中,信号只能向一个方向传输,任何时候都不能改变信号的传送方向。
串行通信(同一时刻只可以发送一个比特, 按先后顺序来)
串口通信
波特率
并行通信(同一时刻多个比特)
嵌入式系统中的通信是指两个或两个以上的主机之间的数据互交,这里的主机可以是计算机也可以是嵌入式主机,甚至可以是芯片。主机间通信的方式一般可以分为两类:并行通信和串行通信。并行通信是指多个比特同时通过并行线进行传输,这种方式的传输速率较高,但会占用大量的芯片资源;串行通信是指将数据拆分成一个个比特,按照先后次序在一根总线上进行发送,串行通信有着系统占用资源少,结构简单等优点,是主机间通信的常用方式。串口通信(Serial Port)是串行通信的一种,属于串行通信中的异步通信。我们经常听到的RS232、RS485、RS422都是串行通信,
什么是异步通信、同步通信?
同步:
同步通信是—种连续串行传送数据的通信方式,—次通信只传送—帧信息。这里的信息帧它们均由同步字符、数据字符和校验字符(CRC)组成。
同步字符位于帧开头用于确认数据字符的开始。数据字符在同步字符之后,个数没有限制,由所需传输的数据块长度来决定;校验字符有1到2个,用于接收端对接收到的字符序列进行正确性的校验。同步通信的缺点是要求发送时钟和接收时钟保持严格的同步。
异步:
异步通信中有两个比较重要的指标:字符帧格式和波特率(传输速率)。数据通常以字符或者字节为单位组成字符帧传送。字符帧由发送端逐帧发送,通过传输线被接收设备逐帧接收。发送端和接收端可以由各自的时钟来控制数据的发送和接收,这两个时钟源彼此独立,互补同步。什么是R
S232、RS485?文章来源:https://www.toymoban.com/news/detail-849857.html
什么是pwm?文章来源地址https://www.toymoban.com/news/detail-849857.html
到了这里,关于Day 1. 51单片机的学习和相关概念的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!