1.效果展示
1.gif 动图展示

2.字幕展示

2.软件开发流程
2.1 全志XR806 基本开发流程
使用指南
自己踩过的坑
必须app开头
鸿蒙hb 依赖python 环境。建议使用conda虚拟环境
下载开启硬件校验和烧录重启
2.2 W2812 简单介绍
不是科普文,自行百度
`/*WS2812B Timing sequence
________
| | T0L |
0 code |<------>|<-------------->|
| T0H |________________|
___________
| | T1L |
1 code |<--------->|<--------- -->|
| T1H |______________|
RET code
| Treset |
|<------------------------->|
|___________________________|
Data transefer time:
T0H 0 code ,high voltage time 0.4us ±150ns
T1H 1 code ,high voltage time 0.8us ±150ns
T0L 0 code , low voltage time 0.85us ±150ns
T1L 1 code ,low voltage time 0.45us ±150ns
RES low voltage time Above 50us
*/`
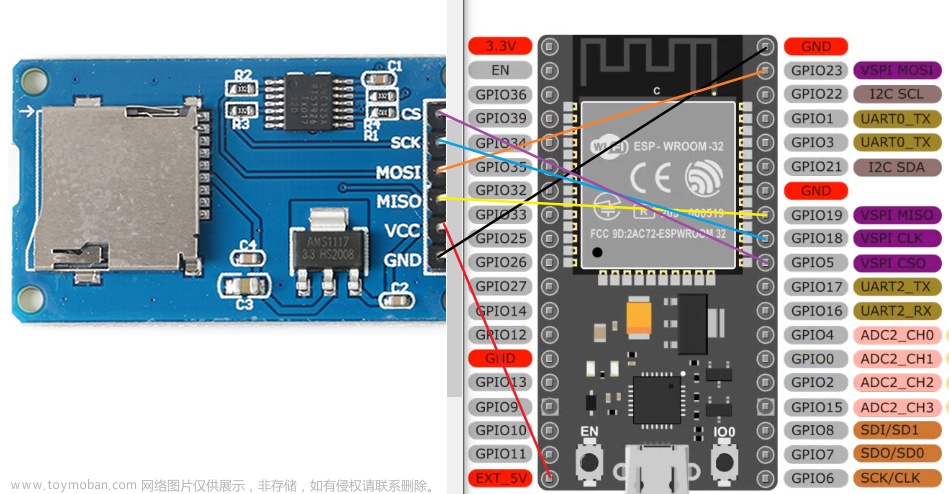
硬件驱动
供电 5V
驱动电平 gpio口3.3v 需要加一些简单的转换电路到5v
驱动时序 这里使用SPI 驱动 支持DMA搬运
PB04 SPIO_MOSI 引脚
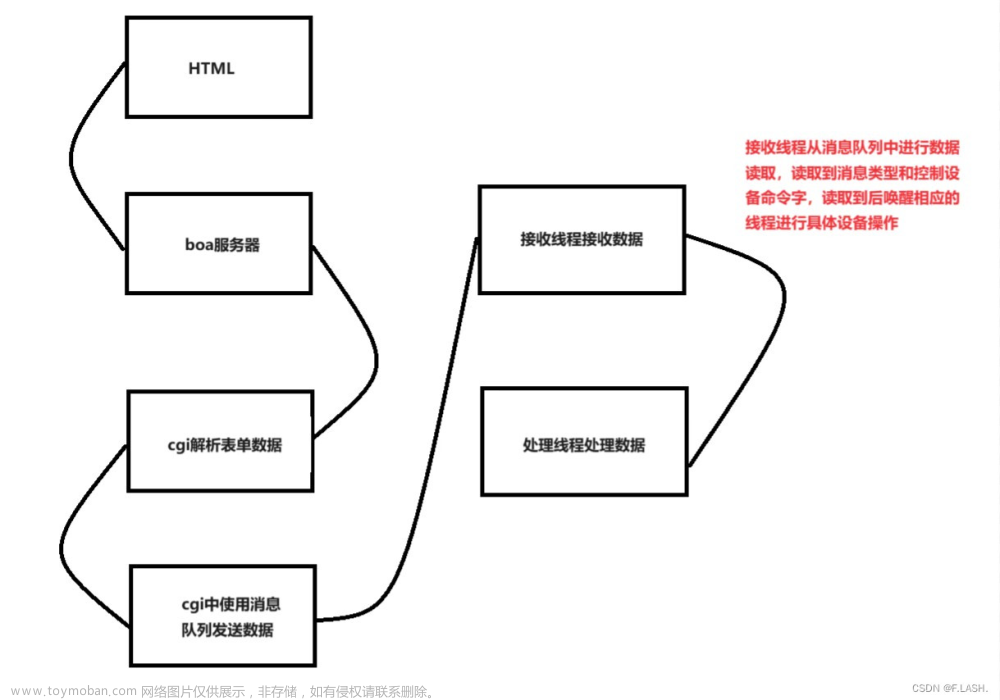
2.3 软件框架
2.3.1 UDP
1.联网获取IP
使用 wlan_demo 中 例子 wifi_device_connect_test
2.绑定端口void udp_echoserver_init(void) { struct udp_pcb *upcb; err_t err; /* Create a new UDP control block */ upcb = udp_new(); if (upcb) { /* Bind the upcb to the UDP_PORT port */ /* Using IP_ADDR_ANY allow the upcb to be used by any local interface */ err = udp_bind(upcb, IP_ADDR_ANY, UDP_SERVER_PORT); if (err == ERR_OK) { /* Set a receive callback for the upcb */ udp_recv(upcb, udp_server_receive_callback, NULL); printf("led udp bind OK \r\n"); }else printf("led udp bind error \r\n"); } }
3.注册接收回调void udp_server_receive_callback(void *arg, struct udp_pcb *upcb,struct pbuf *p, const ip_addr_t *addr, u16_t port) { printf(" 11 udp receive_callback \r\n"); /* Connect to the remote client */ udp_connect(upcb, addr, port); /* Tell the client that we have accepted it */ udp_send(upcb, p); memset(udp_recv_date,0x00,UDP_RECV_DATE_MAX); uint32_t buf_len = pbuf_copy_partial(p, udp_recv_date, p->len, 42); uint32_t cur_pos; if(UDP_RECV_LED_BUFF_LEN==buf_len){ #if 1 for(u32_t i = 0;i < buf_len;){ if(i%48==0)printf("\r\n"); printf("%x-%x-%x ",udp_recv_date[i],udp_recv_date[i+1],udp_recv_date[i+2]); if(udp_recv_date[i]!=0)cur_pos = i; i+=3; } printf("\r\n recv data %d,pos=%d %d,%d\r\n",buf_len,cur_pos,cur_pos/48,(cur_pos%48)/3); #endif led_spi_update(udp_recv_date); //led_spi_update_test(); } /* free the UDP connection, so we can accept new clients */ udp_disconnect(upcb); /* Free the p buffer */ pbuf_free(p); }
4.提取UDP数据pbuf_copy_partial(p, udp_recv_date, p->len, 42);
这里偏移了42。包含了一些UDP通信的信息。
2.3.2 SPI 驱动
1.SPI初始化 这里使用6M的速率
`void led_spi_init(void)
{
printf(“led_spi_init\r\n”);
IoTGpioInit(GPIO_ID_PA21); //(3)
IoTGpioSetDir(GPIO_ID_PA21, IOT_GPIO_DIR_OUT); //(4)
uint16_t i = 0;
uint16_t loop_color = 0;
SPI_Global_Config spi_param;
spi_param.cs_level = DEMO_SPI_CS_LEVEL;
spi_param.mclk = DEMO_SPI_MCLK;
HAL_SPI_Init(DEMO_SPI_PORT, &spi_param);
SPI_Config spi_Config;
HAL_Status ret = HAL_OK;
spi_Config.firstBit = SPI_TCTRL_FBS_MSB;
spi_Config.mode = SPI_CTRL_MODE_MASTER;
spi_Config.opMode = SPI_OPERATION_MODE_DMA;
spi_Config.sclk = DEMO_SPI_MCLK;
spi_Config.sclkMode = SPI_SCLK_Mode1;
printf("spi open...\n");
ret = HAL_SPI_Open(DEMO_SPI_PORT, DEMO_SPI_CS, &spi_Config, 5000);
if (ret != HAL_OK) {
printf("spi open failed");
return ret;
}
HAL_SPI_Config(DEMO_SPI_PORT, SPI_ATTRIBUTION_IO_MODE, SPI_IO_MODE_NORMAL);
printf("led_spi_init ok.\n");
}2.数据发送HAL_SPI_Transmit`
这里有坑:SPI驱动第一次数据第一个自己前2位。波形离谱。这里通过多发一个字节0x00.避免过去。
点阵屏
点阵屏灯排布

这里需要根据自己的走向修改程序。
`void broad_ws2812_set_position(uint8_t w,uint8_t h,uint8_t r,uint8_t g,uint8_t b)
{
uint16_t pos = 0;
pos = wBROAD_WS2812_STRIP_LED_H;
if(w%20){
pos +=h;
}
else{
pos +=(BROAD_WS2812_STRIP_LED_H-h-1);
}
if(rg&&r==b)
{
led_spi_buff[pos3+0] = 0; //
led_spi_buff[pos3+1] = 0;
led_spi_buff[pos3+2] = 0;
}
else{
led_spi_buff[pos3+0] = b/2; //
led_spi_buff[pos3+1] = r/2;
led_spi_buff[pos*3+2] = g/2;
}
}`
把2812控制数据变化成SPI数据
`static void led_data_to_ws2812(uint8_t val, uint8_t* dst)
{
int i = 7;
for (i = 7; i >= 0; i--)
{
if ((val >> i) & 0x01)
{
*(dst++) = 0xfc;
}
else
{
*(dst++) = 0xc0;
}
}
}`
系统简介
本系统实现了,使用python 控制 wifi蓝牙 2812点阵板子控制。可以实现大数据传输,实时仿真控制,暂时很好效果。
开源 百度网盘大家自行下载测试
 文章来源:https://www.toymoban.com/news/detail-850233.html
文章来源:https://www.toymoban.com/news/detail-850233.html
链接:https://pan.baidu.com/s/1b3u0MtCrWUPOOnkjKskyQw
提取码:6666文章来源地址https://www.toymoban.com/news/detail-850233.html
到了这里,关于【XR806开发板试用】简单点灯-- 基于SPI控制W2812矩阵幻彩动图和字幕显示系统的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!