1.下载大疆行业调参软件(大疆官网下载,有mac系统和win系统)。

2.安装软件以后用数据线连接电脑和无人机

3.识别无人机点击进去进入模拟器设置和遥控器相同的经纬坐标

4.在遥控器上载入航线

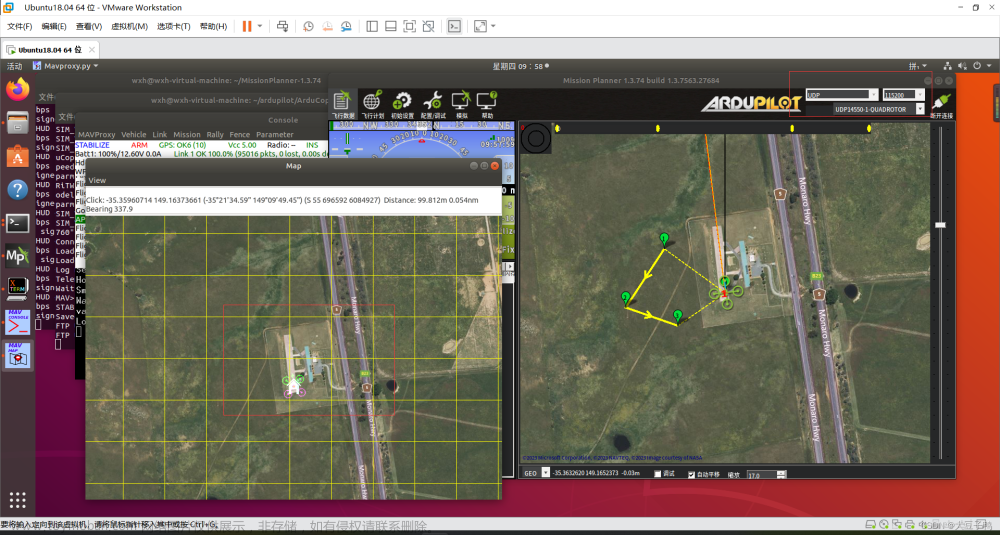
5.开始执行以后在上云api可以看到无人机在地图上移动
 文章来源:https://www.toymoban.com/news/detail-850962.html
文章来源:https://www.toymoban.com/news/detail-850962.html
6.现在就可以用模拟器产生的数据进行上云二次开发了,感谢大家观看。文章来源地址https://www.toymoban.com/news/detail-850962.html
到了这里,关于DJI无人机二次开发:模拟航线飞行的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!