在这项试点研究中,利用低空无人机图像开发了一种针对当地树种的机器学习实例分割模型,用于生态调查目的。实例分割包括个体树冠描绘和物种分类。 20 种树种及其相关学名已通过无人机图像进行了训练和收集,用于机器学习过程。为了评估 ML 模型的准确性,半监督分割图像将与已部署的 ML 模型交叉引用。
介绍
树种分割可以通过两种主要方式实现:光谱反射模式分析和机器学习建模(ML)。光谱特征分析是高光谱成像的常用方法,通过叶子色素反射率进行提取和分割。机器学习和建模方法是学习大规模数据集捕获的模式。一般来说,光谱特征对传感器的要求较高,因此高光谱相机比机器学习方法成本更高。
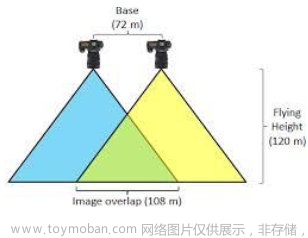
无人机产业的快速发展促进了林业遥感以超高光谱分辨率(约5毫米至10毫米地面采样距离,GSD可能随地形和飞行高度而变化)收集和捕获数据。用于树种识别和分割的机器学习可以成为比光谱反射模式分析成本更低的方法。同时,Meta 引入了一种全新的图像分割方式,使用预训练的 CNN(卷积神经网络)进行图像分割,称为 Segment-Anything Model。那么,机器学习的数据准备对于深度学习定制来说变得更加容易和快捷。因此,用于树种分类和分割的机器学习已成为一项更加以数据为中心的任务,而不是林业遥感中基于实地工作的任务。
通过将低空无人机成像和机器学习相结合,我们开发了一种利用深度学习模型对图像进行即时分割的新方法。该模型涵盖了香港的20个树种,包括本港森林的本地及引进(外来)树种,例如台湾相思、银合欢、木麻黄及榕树。细叶榕。
机器学习模型被用来加强香港乡村和路边的生态调查。通过在光学遥感领域使用机器学习,可以量化和评估更多的自然特征,丰富我们对路边和乡村生态概况的了解。
术语
实例分割
据 IBM 介绍,实例分割是一项深度学习计算机视觉任务,可预测图像中每个单独对象实例(目标类)的精确像素边界。实例分割是更大的图像分割领域的一个子集,它提供比传统对象检测算法更详细的输出。它结合了对象检测和分割的过程。
机器学习
机器学习 (ML) 是指从媒体(例如图像和视频)中识别目标模式的计算机视觉算法。由于 ML 模型基于训练样本,因此 ML 是以数据为中心且特定于案例的。在遥感领域,机器学习广泛用于通过神经网络进行特征检测。文章来源:https://www.toymoban.com/news/detail-851301.html
低空无人机图像</文章来源地址https://www.toymoban.com/news/detail-851301.html
到了这里,关于使用低空无人机图像对树种进行实例分割的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!