知识零散:
1.flash: nor flash 可被寻地址 nand flash 不可寻地址
指令:
add 加 Sub 减 cmp 比较大小 orr 置1 bic 清0
ASR 算数右移 LSL逻辑左移 Ldv 伪指令
16G+128G RAM ROM(flash)
mov 后加s nvcv位 moveq
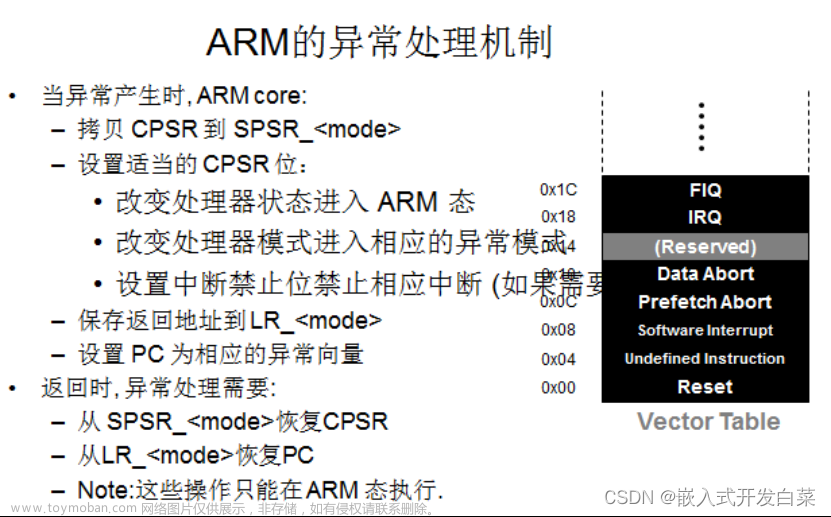
1、ARM的工作模式有哪些?(7种) User:非特权模式,大部分任务执行 在这种模式 FIQ: 当一个高优先级(fast)中断产生时将会进入这种模式 IRQ :当一个低优先级(normal)中断产生时将会进入这种模式 Supervisor:当复位或软中断指令执行时将会进入这种模式 Abort:当存取异常时将会进入到这种模式 Undef: 当执行 未定义指令 时会进入这种模式 System:使用和User模式相同寄存器集的特权模式 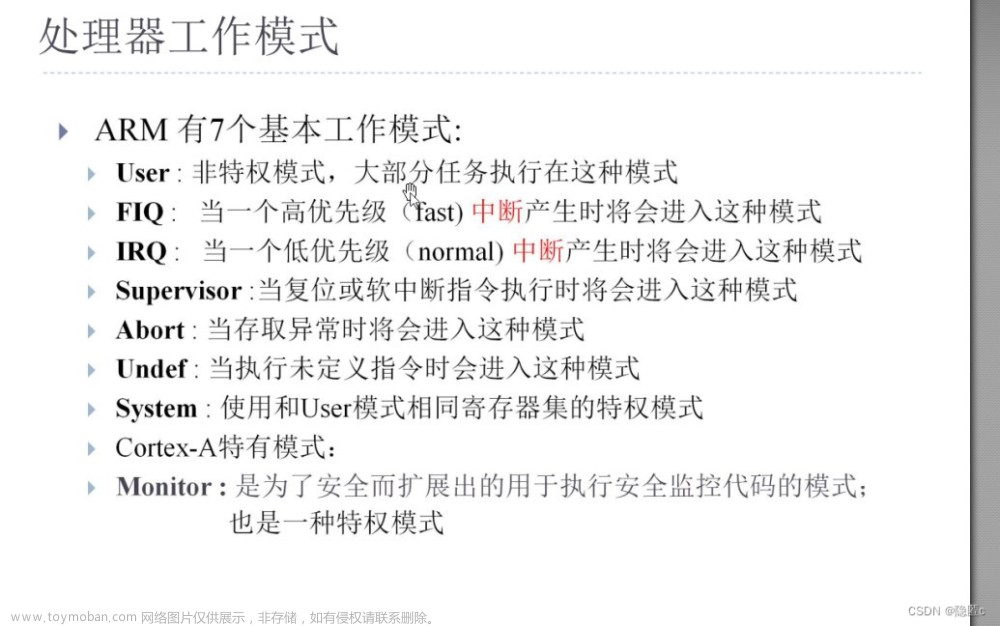
2、ARM9的通用寄存器有几个?
ARM9通用寄存器有 37个 r0-r12 存数据
Cortex通用寄存器有 40个

3、异常向量表中irq的异常向量是多少? 0x18

4、cpsr中的那几位是用来设置工作模式的?
切换arm内核的工作模式(低5位 M)
由于内核的工作模式是由cpsr寄存器的低5位来设置的,那么就可以先把cpsr读出来,更改低5位之后再设置进去。这里读取cpsr使用mrs指令,写cpsr寄存器用msr指令,需要注意的是在keil环境下写cpsr需要写成: msr cpsr_c r0;将r0的值写入到cpsr寄存器
psr分为
cpsr:当前程序状态寄存器
spsr:保存程序状态寄存器(保护现场)
5、r13,r14,15别名是什么?有什么作用?
R15(PC):
程序计数器,用于存储当前取址指令的地址
R14(LR):
链接寄存器,一般有以下两种用途:
1.执行跳转指令(BL/BLX)时,LR会自动保存跳转指令下一条指令的地址
程序需要返回时将LR的值复制到PC即可实现
2.产生异常时,对应异常模式下的LR会自动保存被异常打断的指令的下
一条指令的地址,异常处理结束后将LR的值复制到PC可实现程序返回
R13(SP):
栈指针,用于存储当前模式下的栈顶地址(栈里都是临时数据)
6.那么是什么立即数呢?
指令要操作的 数据以常量的 形式出现在 指令 中,称为立即数
12位立即数的条件是?
- 如果某个数的数值范围是0~255之间,那么这个数一定是立即数;
- 把某个数展开成2进制,这个数的最高位1至最低位1之间的二进制数序列的位数不能超过8位;
- 这个数的二进制序列的右边必须为偶数个连续的 0
例如:0x234 = 0000 0000 0000 0000 0000 0010 0011 0100
最高位1至最低位1之间的二进制数序列:1000 1101没有超过8位
末尾1的右边有2个0,所以0x234是立即数
最高位1至最低位1之间的二进制数序列:0011 1110 1010 1101 从第一个1开始到最后一个1之间超过8位,不满足条件1,所以这个数不是立即数
这是因为ARM中将这 12bits 分为 8bit 常数(0~255)和 4bit 循环右移位值(0~15)
8bit 常数范围(0~255),位移的步进值是以2为单位(即实际位移 2 * rotate 位),可以表示循环有以(0~30)偶数位: 0、2、4、6、8、10、12、14、16、18、20、22、24、26、28、30。在实际存储这个数值的时候,要想办法把这个数压缩到这12位中去。压缩的方法就是找一个数,这个数必须是一个8bit数,之后循环右移2 * rotate位。如果能找打这个数,那么待保存的数就是立即数,否则就不是。
7.RAM 1. sram 2. dram 3. sdram 4. ddr ram

8.ROM
1.rom 2.prom 3.eprom 4.eeprom 5.flash闪存 新一代非易失性存储器

存储大小比较文章来源:https://www.toymoban.com/news/detail-851453.html
 文章来源地址https://www.toymoban.com/news/detail-851453.html
文章来源地址https://www.toymoban.com/news/detail-851453.html
到了这里,关于嵌入式学习52-ARM1的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!