目录
选择适合的硬件
连接电路
编写代码
参考示例
程序一
程序二
测试与调试
注意事项
使用单片机(如常见的Arduino、STM32等)通过PWM(脉冲宽度调制)控制MOS管(金属氧化物半导体场效应管)是一种常见的电路控制方法。以下是一个基本的设计步骤指南:
选择适合的硬件

单片机:选择一款具有PWM输出功能的单片机。
MOS管:根据应用需求选择N沟道或P沟道的MOS管。
电源和电阻:为单片机和MOS管提供适当的电源,并考虑使用电阻来限制电流。
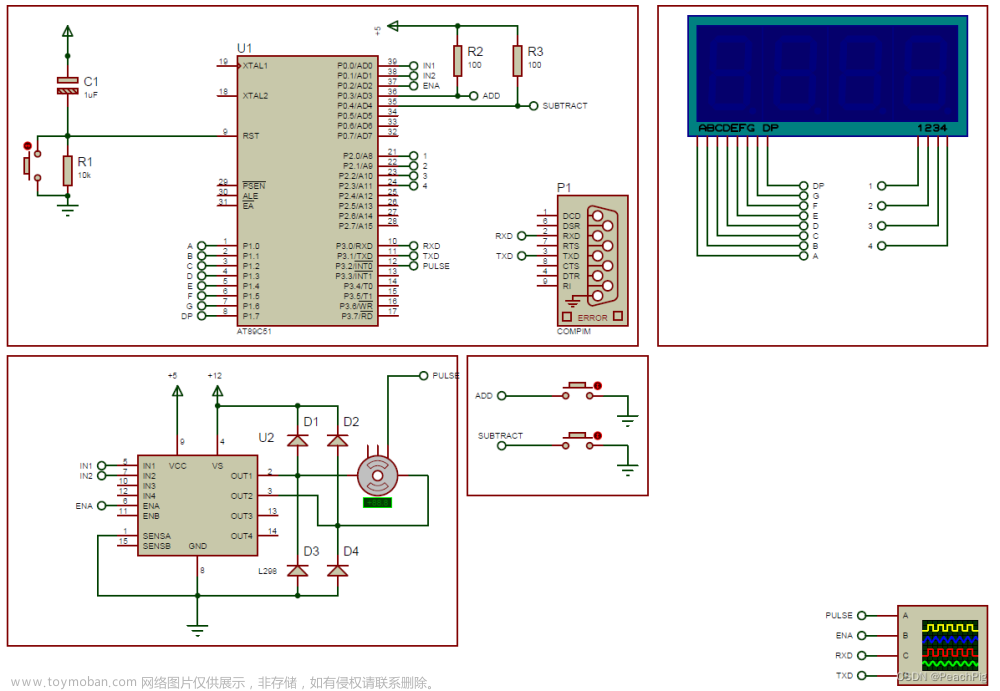
连接电路

单片机PWM引脚连接:将单片机的PWM输出引脚连接到MOS管的栅极(G)。
MOS管源极和漏极连接:根据电路需求,将MOS管的源极(S)和漏极(D)连接到相应的电路元件上。
电源连接:为MOS管提供适当的电源,并连接到其源极或漏极。
编写代码
初始化PWM:在单片机代码中,首先初始化PWM功能,并设置PWM的频率和分辨率。
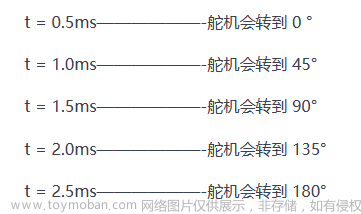
控制PWM占空比:通过改变PWM的占空比(高电平时间占总周期时间的比例),可以控制MOS管的导通程度,从而控制电路的电流或电压。
参考示例
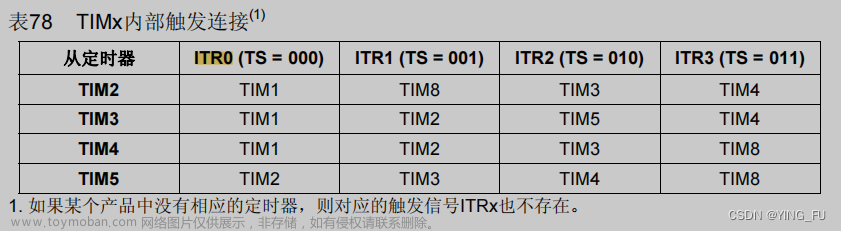
AT89C52是一款经典的8位微控制器,它具有8KB的可编程闪烁存储器(FPEROM),可以被用来编写各种嵌入式系统程序。

在本例中,我们将使用AT89C52的P2.0口来输出一个可调节占空比的PWM信号。以下是一个简单的PWM生成程序的示例。
程序一
#include <reg52.h> // 包含AT89C52的寄存器定义
#define PWM_MAX_DUTY 100 // PWM最大占空比
#define PWM_MIN_DUTY 0 // PWM最小占空比
// 假设使用定时器1产生PWM
// 定时器1的计数初值,用于控制PWM周期
unsigned int Timer1InitValue = 0;
// 定时器1的中断服务程序
void Timer1Interrupt() interrupt 3 {
// 重新加载定时器初值
TH1 = (unsigned char)(Timer1InitValue >> 8);
TL1 = (unsigned char)Timer1InitValue;
// 切换P2.0口的状态,产生PWM信号
P2_0 = !P2_0;
}
// 主函数
void main() {
// 设置P2.0口为输出模式
P2 = 0xFF; // 将P2口的所有位设置为高电平,确保P2.0可以输出
// 初始化定时器1
TMOD |= 0x10; // 设置定时器1为模式1(16位定时器)
TH1 = 0xFF; // 设置定时器1的高8位初值
TL1 = 0xFF; // 设置定时器1的低8位初值
ET1 = 1; // 开启定时器1中断
EA = 1; // 开启全局中断
TR1 = 1; // 启动定时器1
while (1) {
// 在这里可以根据需要调整PWM占空比
// 通过改变Timer1InitValue的值来改变PWM占空比
// 例如,下面的代码将占空比设置为50%
Timer1InitValue = (65536 - (PWM_MAX_DUTY * 65536) / (PWM_MAX_DUTY + PWM_MIN_DUTY)) & 0xFFFF;
}
}
在这个程序中,我们首先定义了PWM的最大和最小占空比,然后设置了定时器1的模式和初值。在定时器1的中断服务程序中,我们切换P2.0口的状态来产生PWM信号。在主函数中,我们通过调整Timer1InitValue的值来改变PWM的占空比。
程序二
#include <reg52.h> // 包含AT89C52寄存器定义的头文件
#define PWM_PIN P2_0 // 定义PWM输出引脚为P2.0
sbit PWM_PIN = P2^0; // 使用sbit定义单个位的别名
unsigned int pwm_count = 0; // PWM计数器
unsigned int pwm_period = 1000; // PWM周期,可以根据需要调整
unsigned int pwm_duty = 500; // PWM占空比,可以根据需要调整(0-1000之间)
void Timer0_Init() {
TMOD &= 0xF0; // 清除定时器0模式位
TMOD |= 0x01; // 设置定时器0为模式1 (16位定时/计数器)
TH0 = (65536 - pwm_period) / 256; // 设置定时器0高8位初值
TL0 = (65536 - pwm_period) % 256; // 设置定时器0低8位初值
ET0 = 1; // 使能定时器0中断
EA = 1; // 开启全局中断
TR0 = 1; // 启动定时器0
}
void Timer0_ISR() interrupt 1 { // 定时器0中断服务程序
TH0 = (65536 - pwm_period) / 256; // 重新加载定时器0高8位初值
TL0 = (65536 - pwm_period) % 256; // 重新加载定时器0低8位初值
if (++pwm_count >= pwm_period) { // 达到一个PWM周期
pwm_count = 0; // 重置计数器
PWM_PIN = ~PWM_PIN; // 切换P2.0口状态,形成PWM波形
}
if (pwm_count < pwm_duty) { // 如果在占空比时间内
PWM_PIN = 1; // 设置P2.0口为高电平
} else {
PWM_PIN = 0; // 设置P2.0口为低电平
}
}
void main() {
Timer0_Init(); // 初始化定时器0
while(1) {
// 主循环保持空闲,PWM波形由定时器中断生成
}
}
在这段代码中,我们设置了定时器0(Timer0)来生成PWM波。pwm_period变量定义了PWM的周期,而pwm_duty变量定义了高电平的持续时间(占空比)。通过调整pwm_duty的值,您可以改变PWM的占空比。
这个程序是一个基础的示例,实际应用中可能需要根据具体的硬件和需求进行调整。
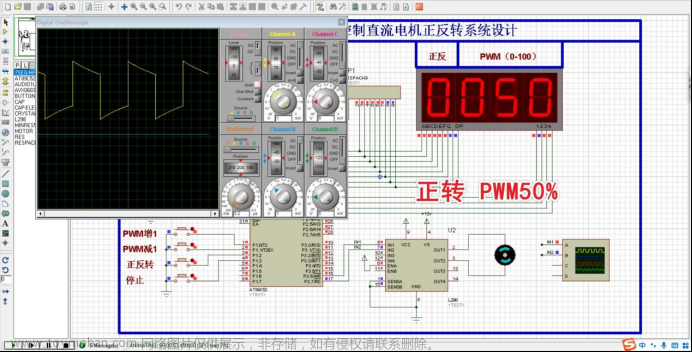
测试与调试
在连接电路和编写代码后,进行测试以确保MOS管按预期工作。
使用示波器或逻辑分析仪观察PWM信号和MOS管的栅极电压。
根据需要调整PWM参数和电路连接。
注意事项
确保单片机的PWM输出范围与MOS管的栅极电压要求相匹配。
在实际应用中,可能需要考虑保护电路,如添加限流电阻或反向二极管等。文章来源:https://www.toymoban.com/news/detail-851988.html
注意单片机的电源电压和MOS管的电源电压是否兼容。文章来源地址https://www.toymoban.com/news/detail-851988.html
到了这里,关于如何使用单片机 pwm 控制 mos 管?的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![如何使用单片机点亮LED灯,并使用按键控制[51单片机]](https://imgs.yssmx.com/Uploads/2024/02/448375-1.png)