机器人在点位与点位之间的运动,会存在速度上的变化,加速度指令的添加可以减小机器人在运动中,由高速到低速间惯性的带来的影响,修正机器人的路径误差,让机器人的运动更加顺滑。
一、ABB机器人指令添加
ABB机器人加速度指令为ACCSET指令
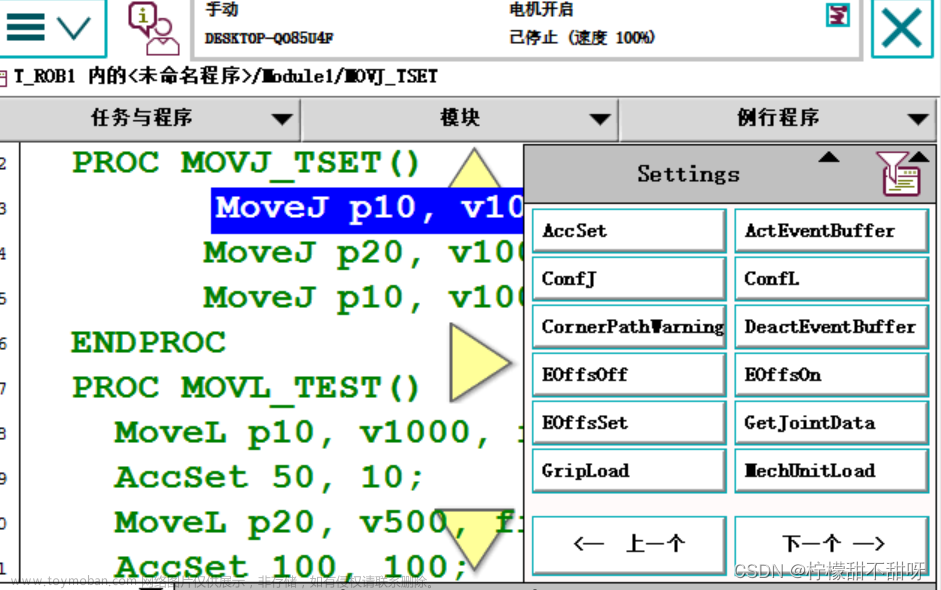
ACCSET指令中的第一个参数是设置加速度,第二个参数为设置减速度

将指令穿插添加在两个机器人两个运动指令之间

二、FANUC机器人指令添加
将光标移动至运动指令最后的空白栏位置,点击下方的选择

选择其中的ACC选项进行添加

输入需要修改的加减速的值,在单独的运动指令后文章来源:https://www.toymoban.com/news/detail-852733.html
 文章来源地址https://www.toymoban.com/news/detail-852733.html
文章来源地址https://www.toymoban.com/news/detail-852733.html
到了这里,关于ABB、FANUC机器人点位加速度用法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!











