Intel FPGA (4):uart
前提摘要
-
个人说明:
- 限于时间紧迫以及作者水平有限,本文错误、疏漏之处恐不在少数,恳请读者批评指正。意见请留言或者发送邮件至:“Email:noahpanzzz@gmail.com”。
- 本博客的工程文件均存放在:GitHub:https://github.com/panziping。
- 本博客的地址:CSDN:https://blog.csdn.net/ZipingPan。
-
参考:
- 芯片型号:Intel EP4CE10F17C8(Cyclone IV E)
- 《数字电子技术基础》-阎石
- 《FPGA自学笔记—设计与验证》袁玉卓,曾凯锋,梅雪松
- 《Verilog 数字系统设计教程》夏宇闻
- 《Verilog HDL 高级数字设计》Michael D.Ciletti
- 《Intel FPGA/CPLD设计》(基础篇)王欣 王江宏等
- 《Intel FPGA/CPLD设计》(高级篇)王江宏 蔡海宁等
- 《综合与时序分析的设计约束 Synopsys设计约束(SDC)实用指南》Sridhar Gangadharan
正文
物理层

电平标准
串口通讯分为TTL标准和RS-232标准。
| 通讯标准 | 电平标准 |
|---|---|
| 5V TTL | 逻辑1:2.4V ~ 5V;逻辑0:0 ~ 0.5V |
| RS-232 | 逻辑1:-15V ~ -3V;逻辑0:+3V ~ +15V |
接口标准(DB9)
| 序号 | 名称 | 符号 | 数据方向 | 说明 |
|---|---|---|---|---|
| 1 | 载波检测 | DCD | DTE→DCE | Data Carrier Detect,数据载波检测,用于DTE告知对方,本机是否收到对方的载波信号 |
| 2 | 接收数据 | RXD | DTE←DCE | Receive Data,数据接收信号 |
| 3 | 发送数据 | TXD | DTE→DCE | Transmit Data,数据发送信号 |
| 4 | 数据终端(DTE)就绪 | DTR | DTE→DCE | Data Terminal Ready,数据终端就绪,用于DTE向对方告知本机是否已准备好 |
| 5 | 信号地 | GND | - | 共地线 |
| 6 | 数据设备(DCE)就绪 | DSR | DTE←DCE | Data Set Ready,数据发送就绪,用于DCE告知对方本机是否处于待命状态 |
| 7 | 请求发送 | RTS | DTE→DCE | Request To Send,请求发送,DTE请求DCE本设备向DCE端发送数据 |
| 8 | 允许发送 | CTS | DTE←DCE | Clear To Send,允许发送,DCE回应对方的RTS发送请求,告知对方是否可以发送数据 |
| 9 | 响铃指示 | RI | DTE←DCE | Ring Indicator,响铃指示,表示DCE端与线路已接通 |
实际使用中,受限于设备IO较少,成本等因素,只保留了RXD,TXD,GND三条信号线。
串口协议

需要注意的上图采用的是正逻辑进行数据通信,同样有采用负逻辑进行数据通信。
停止位可以是1bit、1.5bits、2bits。
数据位可以是5bits、6bits、7bits、8bits。
校验位分为无校验、奇校验和偶校验。
verilog代码中数据的校验使用的是异或运算。
module check_parity(
data,
parity_odd,
parity_even
);
input [7:0] data;
output parity_odd;
output parity_even;
assign parity_odd = ~^data;
assign parity_even = ^data;
endmodule
注意上述数据使用的是正逻辑。
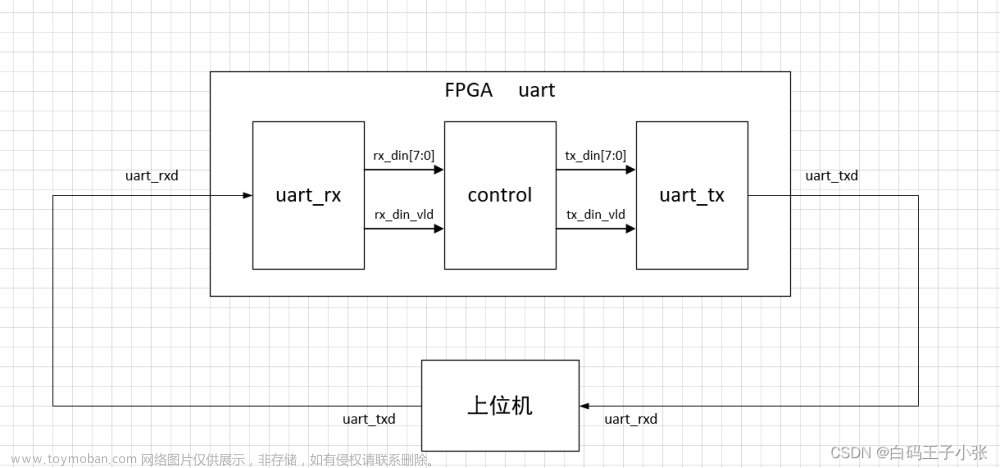
串口接收
波形图

检测接收总线下降沿(起始位),使能串口接收功能,在数据位中间时刻采样,数据更加稳定。
串口接收程序:
module uart_rxd(
clk,
rst_n,
rxd,
parity,
rxd_data,
rxd_data_valid_go
);
input clk;
input rst_n;
input rxd;
input [1:0] parity;
output [7:0] rxd_data;
output rxd_data_valid_go;
localparam BAUD = 115200;
localparam SYS_FREQ = 50_000_000;
localparam BAUD_DR = SYS_FREQ / BAUD;
localparam P_EVEN = 2'b00;
localparam P_ODD = 2'b01;
localparam P_NONE = 2'b10;
reg [3:0] r_bit_width;
always@(*) begin
case(parity)
P_EVEN : r_bit_width = 4'd10;
P_ODD : r_bit_width = 4'd10;
P_NONE : r_bit_width = 4'd9;
default :r_bit_width = 4'd9;
endcase
end
reg [2:0] r_rxd_sync;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_rxd_sync <= 'd0;
else
r_rxd_sync <= {r_rxd_sync[1:0],rxd};
end
wire w_rxd_nedge;
assign w_rxd_nedge = (r_rxd_sync[2:1] == 2'b10) ? 1'b1:1'b0;
reg r_rxd_en;
reg [3:0] r_bit_cnt;
wire w_rxd_end;
reg r_rxd_data_error;
reg [$clog2(BAUD_DR)-1:0] r_baud_cnt;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_rxd_en <= 1'b0;
else if(w_rxd_nedge == 1'b1)
r_rxd_en <= 1'b1;
else if(r_rxd_data_error == 1'b1 || w_rxd_end == 1'b1)
r_rxd_en <= 1'b0;
else
r_rxd_en <= r_rxd_en;
end
assign w_rxd_end = (r_baud_cnt == BAUD_DR >> 1) && (r_bit_cnt == r_bit_width);
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_baud_cnt <= 'd0;
else if(r_rxd_en == 1'b1)
if(r_baud_cnt == BAUD_DR - 1'd1)
r_baud_cnt <= 'd0;
else
r_baud_cnt <= r_baud_cnt + 1'd1;
else
r_baud_cnt <= 'd0;
end
wire w_bps_clk;
assign w_bps_clk = (r_baud_cnt == BAUD_DR >> 1 ) ? 1'b1:1'b0;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_bit_cnt <= 'd0;
else if(r_rxd_en == 1'b1)
if(r_baud_cnt == BAUD_DR - 1'd1)
r_bit_cnt <= r_bit_cnt + 1'b1;
else
r_bit_cnt <= r_bit_cnt;
else
r_bit_cnt <= 'd0;
end
reg [7:0] r_rxd_data;
always@(posedge clk or negedge rst_n) begin
if(!rst_n) begin
r_rxd_data_error <= 1'd0;
r_rxd_data <= 8'd0;
end
else if(w_bps_clk == 1'b1) begin
case(r_bit_cnt)
4'd0: begin r_rxd_data_error <= (r_rxd_sync[2] == 1'b1) ? 1'b1 : 1'b0; end
4'd1: begin r_rxd_data[0] <= r_rxd_sync[2];end
4'd2: begin r_rxd_data[1] <= r_rxd_sync[2];end
4'd3: begin r_rxd_data[2] <= r_rxd_sync[2];end
4'd4: begin r_rxd_data[3] <= r_rxd_sync[2];end
4'd5: begin r_rxd_data[4] <= r_rxd_sync[2];end
4'd6: begin r_rxd_data[5] <= r_rxd_sync[2];end
4'd7: begin r_rxd_data[6] <= r_rxd_sync[2];end
4'd8: begin r_rxd_data[7] <= r_rxd_sync[2];end
4'd9: begin
case(parity)
P_EVEN : r_rxd_data_error <= (^r_rxd_data^r_rxd_sync[2] == 1'b0) ? 1'b0 : 1'b1;
P_ODD : r_rxd_data_error <= (^r_rxd_data^r_rxd_sync[2] == 1'b1) ? 1'b0 : 1'b1;
P_NONE : r_rxd_data_error <= (r_rxd_sync[2] == 1'b0) ? 1'b1 : 1'b0;
default:r_rxd_data_error <= 1'd1;
endcase
end
4'd10: r_rxd_data_error <= (r_rxd_sync[2] == 1'b0) ? 1'b1 : 1'b0;
default:;
endcase
end //else if
else begin
r_rxd_data_error <= 1'd0;
r_rxd_data <= r_rxd_data;
end
end
reg r_rxd_data_valid_go;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_rxd_data_valid_go <= 1'b0;
else if((r_baud_cnt == BAUD_DR >> 1) && (r_bit_cnt == r_bit_width))
r_rxd_data_valid_go <= 1'b1;
else
r_rxd_data_valid_go <= 1'b0;
end
assign rxd_data = r_rxd_data;
assign rxd_data_valid_go = r_rxd_data_valid_go;
endmodule
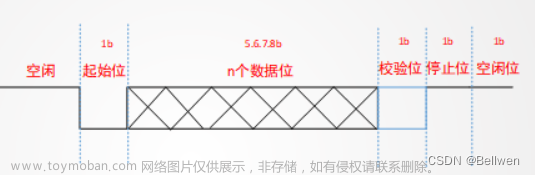
串口发送
波形图

当发送使能脉冲信号到来时,启动发送模块。需要注意此图中r_bit_cnt,应该到12位。
串口发送程序:
module uart_txd(
clk,
rst_n,
txd_data,
txd_en_go,
parity,
txd,
txd_busy
);
input clk;
input rst_n;
input [7:0] txd_data;
input txd_en_go;
input [1:0] parity;
output txd;
output txd_busy;
localparam BAUD = 115200;
localparam SYS_FREQ = 50_000_000;
localparam BAUD_DR = SYS_FREQ / BAUD;
localparam P_EVEN = 2'b00;
localparam P_ODD = 2'b01;
localparam P_NONE = 2'b10;
reg [3:0] r_bit_width;
always@(*) begin
case(parity)
P_EVEN : r_bit_width = 4'd12;
P_ODD : r_bit_width = 4'd12;
P_NONE : r_bit_width = 4'd11;
default :r_bit_width = 4'd11;
endcase
end
reg [7:0] r_txd_data;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_txd_data <= 8'd0;
else if(txd_en_go == 1'b1)
r_txd_data <= txd_data;
else
r_txd_data <= r_txd_data;
end
reg r_txd_en;
reg [3:0] r_bit_cnt;
wire w_txd_end;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_txd_en <= 1'b0;
else if(txd_en_go == 1'b1)
r_txd_en <= 1'b1;
else if(w_txd_end == 1'b1)
r_txd_en <= 1'b0;
else
r_txd_en <= r_txd_en;
end
assign txd_busy = r_txd_en;
assign w_txd_end = (r_bit_cnt == r_bit_width) ? 1'b1 : 1'b0;
reg [$clog2(BAUD_DR)-1:0] r_baud_cnt;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_baud_cnt <= 'd0;
else if(r_txd_en == 1'b1) begin
if(r_baud_cnt == BAUD_DR - 1)
r_baud_cnt <= 'd0;
else
r_baud_cnt <= r_baud_cnt + 1'b1;
end
else
r_baud_cnt <= 'd0;
end
wire w_bps_clk;
assign w_bps_clk = (r_baud_cnt == 1'b1) ? 1'b1:1'b0;
always@(posedge clk or negedge rst_n) begin
if(!rst_n)
r_bit_cnt <= 4'd0;
else if(r_txd_en == 1'b1) begin
if(w_bps_clk == 1'b1)
r_bit_cnt <= r_bit_cnt + 1'b1;
else
r_bit_cnt <= r_bit_cnt;
end
else
r_bit_cnt <= 4'd0;
end
reg r_txd;
always@(posedge clk or negedge rst_n) begin
if(!rst_n) begin
r_txd <= 1'b1;
end
else begin
case(r_bit_cnt)
0: begin r_txd <= 1'b1; end
1: begin r_txd <= 1'b0; end
2: begin r_txd <= r_txd_data[0]; end
3: begin r_txd <= r_txd_data[1]; end
4: begin r_txd <= r_txd_data[2]; end
5: begin r_txd <= r_txd_data[3]; end
6: begin r_txd <= r_txd_data[4]; end
7: begin r_txd <= r_txd_data[5]; end
8: begin r_txd <= r_txd_data[6]; end
9: begin r_txd <= r_txd_data[7]; end
10: begin
case(parity)
P_EVEN : r_txd <= ^r_txd_data;
P_ODD : r_txd <= ~^r_txd_data;
P_NONE : r_txd <= 1'b1;
default: r_txd <= 1'd1;
endcase
end
11: begin r_txd <= 1'd1; end
12: begin r_txd <= 1'd1; end
default:begin r_txd <= 1'd1; end
endcase
end
end
assign txd = r_txd;
endmodule
顶层测试文件
module uart_loop(
i_clk,
i_rst_n,
i_rx,
o_tx
);
input i_clk;
input i_rst_n;
input i_rx;
output o_tx;
localparam P_EVEN = 2'b00;
localparam P_ODD = 2'b01;
localparam P_NONE = 2'b10;
wire [7:0] w_uart_data;
wire w_uart_data_valid_go;
uart_rxd uart_rxd(
.clk(i_clk),
.rst_n(i_rst_n),
.rxd(i_rx),
.parity(P_NONE),
.rxd_data(w_uart_data),
.rxd_data_valid_go(w_uart_data_valid_go)
);
uart_txd uart_txd(
.clk(i_clk),
.rst_n(i_rst_n),
.txd_data(w_uart_data),
.txd_en_go(w_uart_data_valid_go),
.parity(P_NONE),
.txd(o_tx),
.txd_busy()
);
endmodule
本工程名为uart,如有需要请至github仓库查看!!!
总结
工程中很少能够应用到串口回环测试程序。
一般数据流的处理过程应该是:
- 串口接收
- 数据存储(RAM或者FIFO)
- 协议解析
- 数据处理
- 串口发送
本文均为原创,欢迎转载,请注明文章出处:CSDN:https://blog.csdn.net/ZipingPan/FPGA。百度和各类采集站皆不可信,搜索请谨慎鉴别。技术类文章一般都有时效性,本人习惯不定期对自己的博文进行修正和更新,因此请访问出处以查看本文的最新版本。文章来源:https://www.toymoban.com/news/detail-852810.html
非原创博客会在文末标注出处,由于时效原因,可能并不是原创作者地址(已经无法溯源)。文章来源地址https://www.toymoban.com/news/detail-852810.html
到了这里,关于Intel FPGA:uart的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!