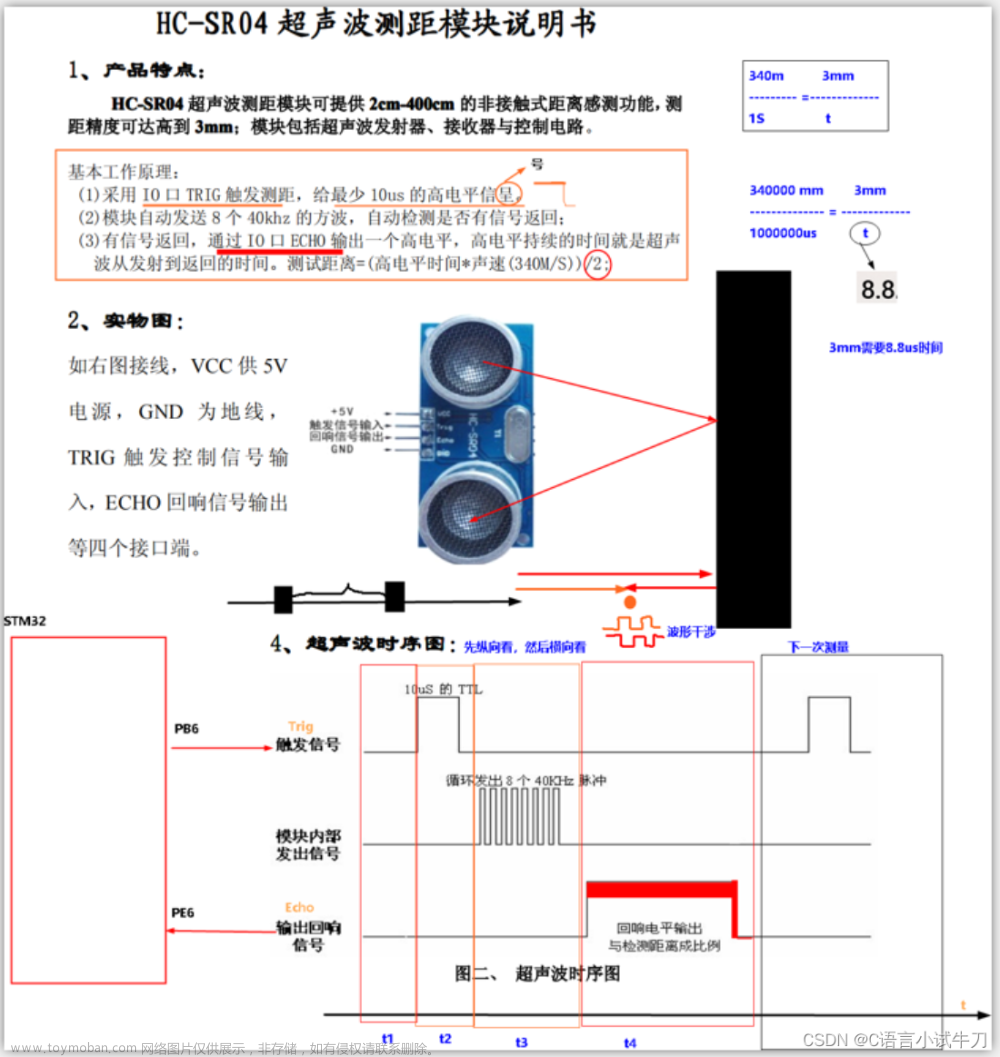
超声波模块HC-SR04的工作原理很简单,有很多办法可以完成超声波测距,这里简单介绍两种。
1.定时器中断法
配置定时器的中断并声明一个Time的变量,在中断中先判断标志位,然后检查echo端口是否为高电平,如果是,Time++,然后变量time乘以定时时间就能得到echo端口高电平持续的时间,经过计算就可以得到距离。
Timer.c
#include "stm32f10x.h" // Device header
#include "Timer.h"
extern uint16_t Time; //Time变量在HCSR04.c文件中定义
void Timer_Init()
{
Time = 0;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //选择APB1总线下的定时器Timer3
TIM_InternalClockConfig(TIM3); //TIM3使用内部时钟
//默认使用内部时钟,不写这句代码也没关系
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟1分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数模式,此处为向上计数
TIM_TimeBaseInitStructure.TIM_Period = 7200 - 1; //ARR 1 = 0.0001S,自动重装器的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 0; //PSC,预分频器的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //高级计时器特有,重复计数
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); //使能中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //将中断优先级分为两组,即组1和组2。
NVIC_InitTypeDef NVIC_InitStructure;// 定义一个NVIC_InitTypeDef结构体变量,用于初始化中断控制器
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;// 设置中断通道为TIM3的IRQn中断
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;// 使能中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;// 设置中断优先级为2,表示高优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;// 设置中断子优先级为1,表示低优先级
NVIC_Init(&NVIC_InitStructure);// 使用NVIC_Init函数初始化中断控制器
TIM_Cmd(TIM3, ENABLE);// 使能定时器TIM3
}
void TIM3_IRQHandler(void) // 定时器3的中断函数
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) // 检查定时器3的更新中断标志位是否被设置
{
if (GPIO_ReadInputDataBit(Echo_Port, Echo_Pin) == 1) // 读取回声传感器端口上的引脚状态
{
Time++; // 如果引脚状态为高电平,则增加时间计数器
}
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清空标志位,表示中断已经处理完毕
}
}
Timer.h
#ifndef __TIMER_H
#define __TIMER_H
#define Trig_Port GPIOA
#define Trig_Pin GPIO_Pin_5
#define Trig_RCC RCC_APB2Periph_GPIOA
#define Echo_Port GPIOA
#define Echo_Pin GPIO_Pin_6
#define Echo_RCC RCC_APB2Periph_GPIOA
void Timer_Init(void);
#endif
2.输入捕获法
配置定时器的输入捕获,在echo端口的上升沿捕获一次,下降沿捕获一次,通过“TIM_GetCapture2(TIM3)”这句代码直接可以将时间读取出来。
IC.c
#include "stm32f10x.h" // Device header
void IC_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); // TIM3->使用引脚PA6
//在超声波模块已经配置过
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// GPIO_InitTypeDef GPIO_InitStructure;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;//PB6引脚,接入超声波Echo引脚
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//配置时基单元
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC分频系数
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//通道一
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//TIM3的通道1
TIM_ICInitStructure.TIM_ICFilter = 0xF;//配置滤波器,参数决定滤波效果,高频滤波
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;//极性选择,选择上升沿触发
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;//每次都触发捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//通道触发选择
//通道二
// TIM_ICInitStructure.TIM_Channel=TIM_Channel_2;//捕获通道二
// TIM_ICInitStructure.TIM_ICFilter=0xF;//滤除高频波动
// TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Falling;//下降触发捕获
// TIM_ICInitStructure.TIM_ICPrescaler=TIM_ICPSC_DIV1;//不分频
// TIM_ICInitStructure.TIM_ICSelection=TIM_ICSelection_IndirectTI;//交叉通道输入
// TIM_ICInit(TIM3,&TIM_ICInitStructure);
TIM_PWMIConfig(TIM3, &TIM_ICInitStructure);//pwmi模式配置通道2,效果相当于上面的代码
TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1);
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);
TIM_Cmd(TIM3, ENABLE);
}
IC.h
#ifndef __IC_H
#define __IC_H
void IC_Init(void);
#endif
#超声波部分
这里将展示如何将获取到的时间值计算得到距离,定时器中断和输入捕获两种方法的实现都在下面的文件中,我们正确添加完文件后,在main文件中直接调用就可以实现测距的功能了。
HCSR04.c文章来源:https://www.toymoban.com/news/detail-852813.html
#include "stm32f10x.h" // Device header
#include "HCSR04.h"
#include "Timer.h"
#include "Delay.h"
uint16_t Time;
void HCSR04_Init()
{
RCC_APB2PeriphClockCmd(Trig_RCC, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = Trig_Pin;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Trig_Port, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStruct.GPIO_Pin = Echo_Pin;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(Echo_Port, &GPIO_InitStruct);
GPIO_ResetBits(Trig_Port, Trig_Pin);//Trig引脚给低电平,为后续启动做准备
}
void HCSR04_Start(void)
{
GPIO_SetBits(Trig_Port, Trig_Pin);
Delay_us(40);
GPIO_ResetBits(Trig_Port, Trig_Pin);
Timer_Init();//定时器初始化
}
uint16_t HCSR04_GetValue(void) //定时器中断测距
{
HCSR04_Start();
Delay_ms(100);
return ((Time * 0.0001) * 34000) / 2;
// return Time;
}
float GetLength(void) //输入捕获测距
{
int i=0;
float length=0;
float sum=0;
float Length;
for(i=0;i<5;i++)
{
//减小误差,计算五次
GPIO_SetBits(GPIOA,GPIO_Pin_5);
Delay_us(20);//发送一段40us的高电平
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
Time=TIM_GetCapture2(TIM3); //获取捕获值
length=(Time/58.0);//固定计算超声波距离公式:时间/58.0;单位厘米
sum=sum+length;
}
Length=sum/5.0;
return Length;
}
HCSR04.h文章来源地址https://www.toymoban.com/news/detail-852813.html
#ifndef __HCSR04_H
#define __HCSR04_H
#define Trig_Port GPIOA
#define Trig_Pin GPIO_Pin_5
#define Trig_RCC RCC_APB2Periph_GPIOA
#define Echo_Port GPIOA
#define Echo_Pin GPIO_Pin_6
#define Echo_RCC RCC_APB2Periph_GPIOA
void HCSR04_Init(void);
uint16_t HCSR04_GetValue(void);
float GetLength(void);
#endif
到了这里,关于STM32:两种方式实现超声波测距的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!