spi通信模式
SPI通信协议有以下4种模式:
-
模式0:时钟极性为0,时钟相位为0,数据在时钟下降沿捕获,数据在时钟上升沿改变。
-
模式1:时钟极性为0,时钟相位为1,数据在时钟上升沿捕获,数据在时钟下降沿改变。
-
模式2:时钟极性为1,时钟相位为0,数据在时钟上升沿捕获,数据在时钟下降沿改变。
-
模式3:时钟极性为1,时钟相位为1,数据在时钟下降沿捕获,数据在时钟上升沿改变。
不同模式的区别在于时钟极性和相位,不同的设备在进行SPI通信时需要根据其支持的模式来进行设置。
stm32、fpga spi通信方案
STM32和FPGA之间可以使用多种通信方式进行通信,例如SPI、I2C、UART、USB等。其中,SPI是一种常用的通信方式,可以实现高速数据传输。以下是基于SPI通信的STM32与FPGA通信步骤:
-
确定通信协议:确定通信协议,包括数据传输方式、数据帧格式、时序等。
-
连接硬件接口:将STM32和FPGA之间的硬件接口连接起来,例如将STM32的SPI接口与FPGA的SPI接口连接。
-
配置STM32和FPGA:通过编程配置STM32和FPGA的通信参数,例如时钟频率、数据位数、校验方式等。
-
开始通信:通过STM32发送数据到FPGA,或者从FPGA发送数据到STM32。
-
处理数据:在STM32或FPGA中对接收到的数据进行处理,例如进行数据分析、转换等。
-
关闭通信:通信完成后,关闭STM32和FPGA之间的通信连接。
需要注意的是,STM32和FPGA之间的通信需要进行一定的硬件和软件的开发工作,具体实现方式需要根据实际需求进行设计和开发。
spi数据格式
主从SPI通信的帧格式和时序如下:
1.帧格式:
在SPI通信中,每一次数据交换都需要一个帧格式。
主机发送帧格式(8位数据):
| 位数 | 功能 |
|---|---|
| 1 | 同步引导位(低电平) |
| 2 | 传输方向(0-主机向从机发送,1-从机向主机发送) |
| 3-8 | 数据位(可以是控制信号或数据) |
从机响应帧格式(8位数据):
| 位数 | 功能 |
|---|---|
| 1 | 检测同步引导位(低电平) |
| 2-8 | 数据位(可以是控制信号或数据) |
SPI通信的帧格式通常由命令字、地址、数据等部分组成。针对FPGA作为从机的场景,以下是一种常见的帧格式:
| 命令字 | 地址 | 数据 |
|---|---|---|
| 1 byte | 1-4 bytes | N bytes |
- 命令字:表示数据传输的类型,如读写等。
- 地址:表示FPGA中需要读写的寄存器地址。
- 数据:表示要读写的数据,长度可变。
2.时序:
SPI通信的时序通常由时钟、数据输入、数据输出等信号组成。
- SCK:时钟信号,由主机控制,用于同步数据传输。
- MOSI:主机到从机的数据信号,数据由主机发出。
- MISO:从机到主机的数据信号,数据由从机发出。
- SS:片选信号,用于选择从机。
主机通过SPI总线与从机进行通信,其时序如下:
(1)选中从机
主机通过片选信号(CS)将需要通信的从机选中,从而与其建立通信。CS信号一般为低电平有效。在通信开始和结束后需将CS信号拉高。
(2)时钟相关
主机通过时钟信号(SCK)控制时序,SCK的空闲状态一般为高电平。
(3)主机发送数据
在SCK信号的上升沿,主机发出一个字节的数据,并在下降沿读取从机响应的数据。在此期间,从机也发送了一个字节的数据。
(4)从机响应数据
从机接收主机发送的数据,并根据数据进行相应操作。从机在接收到主机数据后,也可以发送一个字节的数据给主机。
(5)时序结束
在完成数据传输后,主机将CS信号拉高,从而结束通信。
3.传输模式
在SPI总线上,可以选择不同的传输模式:
(1)全双工传输:主机和从机同时发送和接收数据。
(2)半双工传输:主机和从机交替进行发送和接收数据,一次只能进行发送或接收操作。
(3)单向传输:主机向从机发送数据或从机向主机发送数据。
4.示例程序
以下是一个简单的示例程序,演示了如何使用STM32作为主机与FPGA进行SPI通信。其中,FPGA的寄存器地址为0x01,要写入的数据为0xABCD。
#include "stm32f10x.h"
// 初始化SPI接口
void SPI2_Init()
{
GPIO_InitTypeDef GPIO_InitStruct;
SPI_InitTypeDef SPI_InitStruct;
// 使能SPI2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO | RCC_APB2Periph_SPI1, ENABLE);
// 配置SPI引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
// 配置SPI参数
SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStruct.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStruct.SPI_CPOL = SPI_CPOL_High;
SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStruct.SPI_Mode = SPI_Mode_Master;
SPI_InitStruct.SPI_NSS = SPI_NSS_Soft;
SPI_Init(SPI1, &SPI_InitStruct);
// 使能SPI接口
SPI_Cmd(SPI1, ENABLE);
}
// 发送数据到FPGA
void SPI_SendData(uint8_t cmd, uint32_t addr, uint8_t *data, uint8_t len)
{
// 选择从机
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
// 发送命令字
SPI_I2S_SendData(SPI1, cmd);
// 发送地址
for (int i = 0; i < 4; i++)
SPI_I2S_SendData(SPI1, (addr >> (24 - i * 8)) & 0xFF);
// 发送数据
for (int i = 0; i < len; i++)
SPI_I2S_SendData(SPI1, data[i]);
// 等待发送完成
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_BSY) == SET)
;
// 取消从机选择
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
int main(void)
{
uint8_t data[] = {0xAB, 0xCD};
// 初始化SPI接口
SPI2_Init();
// 发送数据到FPGA
SPI_SendData(0x01, 0x00000001, data, 2);
while (1)
;
return 0;
}
注意,在实际使用中,需要根据具体的硬件平台、通信协议等情况进行相应的调整。
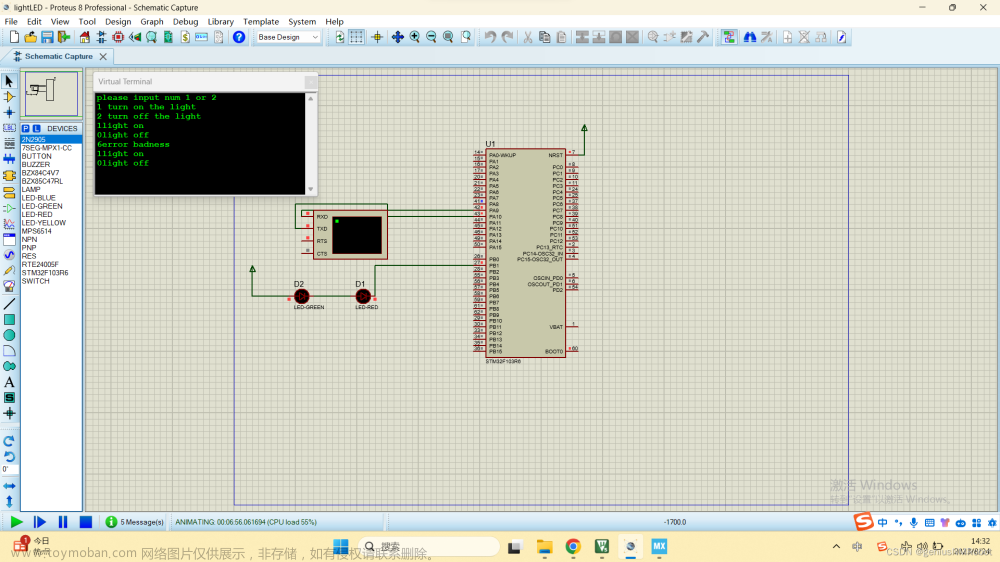
连接硬件接口
- SCK:时钟信号,stm32输出,fpga输入;
- MOSI:主机(Master)输出,从机(Slave)输入,stm32输出,fpga输入;
- MISO:主机(Master)输入,从机(Slave)输出,stm32输入,fpga输出;
- CS:片选信号,用于选择从机。
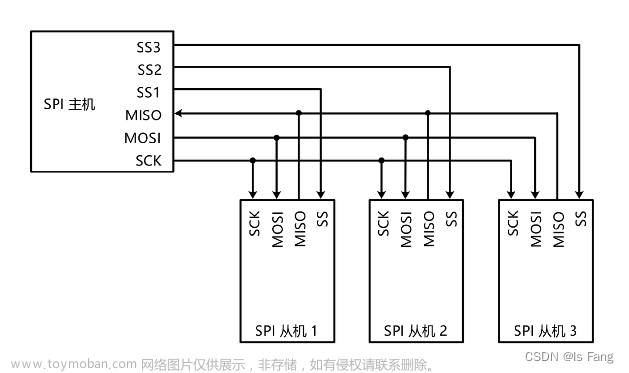
要连接STM32和FPGA,可以使用SPI接口进行通信。SPI接口包括四根信号线:SCK、MOSI、MISO和SS。其中,SCK是时钟信号,MOSI是主机发送数据到从机的信号线,MISO是从机发送数据到主机的信号线,SS是片选信号,用于选择从机设备。
在连接STM32和FPGA时,需要将SCK、MOSI、MISO和SS分别连接到对应的引脚上。具体的连接方式可以根据不同的硬件平台和开发板来确定,通常会在开发板上标注SPI接口的引脚编号。
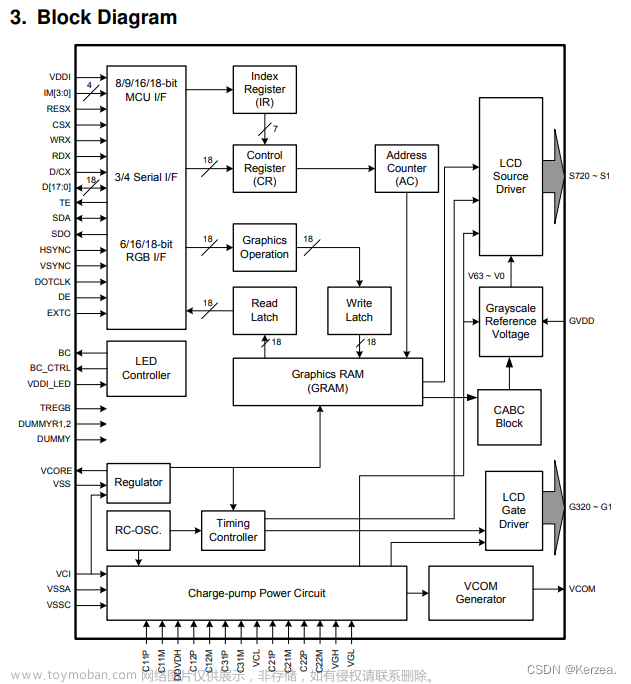
FPGA作为从机,它的SPI接口的引脚需要根据具体的FPGA型号来确定,一般可以在FPGA的开发板手册中找到对应的信息。
需要注意的是,在连接SPI接口时,需要确保信号线的电平兼容性,即STM32和FPGA的信号电平要相同。如果有不同,需要考虑使用电平转换器等器件来实现。
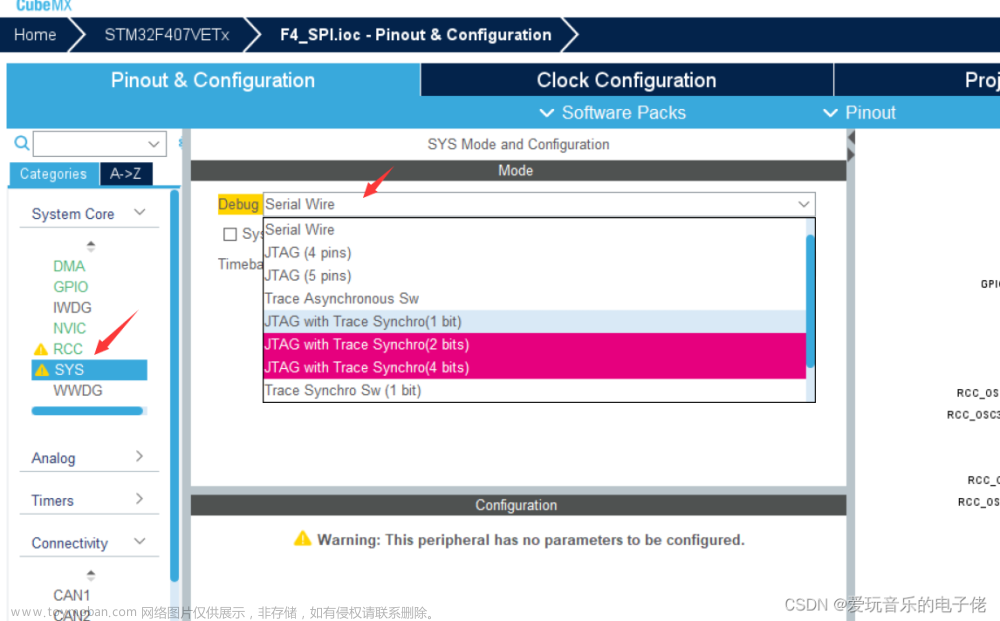
配置STM32和FPGA
在SPI通信中,STM32作为主机,需要配置GPIO口和SPI外设,FPGA作为从机,需要将SPI接口引出到FPGA芯片的引脚上,并设置FPGA的SPI控制器。
下面是STM32和FPGA的配置步骤:
1、STM32的配置:
a. 配置GPIO口:选择STM32的GPIO口,将其配置为SPI模式,以便与FPGA进行SPI通信。
b. 配置SPI外设:选择STM32的SPI外设,设置SPI时钟频率、数据位数、CPOL和CPHA等参数。在SPI模式下,STM32可以主动发送数据,还可以通过SPI中断或DMA方式接收FPGA发送的数据。
2、FPGA的配置:
a. 引脚分配:将FPGA的SPI接口引出到FPGA芯片的引脚上,以便与STM32进行SPI通信。
b. SPI控制器配置:将FPGA的SPI控制器配置为从机模式,设置SPI时钟频率、数据位数、CPOL和CPHA等参数,以便与STM32进行SPI通信。
以上是大致的配置步骤,具体的实现要根据具体的芯片型号和开发环境而定。
开始通信
SPI通信是通过主机(STM32)发出时钟信号来控制从机(FPGA)发送和接收数据的。通信开始前,需要进行以下操作:
| 1、确认接口连接 | 包括SCK(时钟)、MOSI(主机输出从机输入)、MISO(主机输入从机输出)和SS(从机片选)信号 |
| 2、stm32初始化 | 在STM32的代码中初始化SPI接口,包括时钟频率、数据位数、传输模式等参数 |
| 3、fpga准备 | 在FPGA的代码中等待主机的片选信号,并回复从机的准备信号。当接收到主机发出的SPI时钟信号后,从机开始发送和接收数据,直到传输完成 |
| 4、结束 | 主机按照通信协议向从机发送命令和数据,并等待从机的响应。通信结束后,关闭SPI接口 |
需要注意的是,通信协议需要主从双方约定好,并按照该协议进行通信。在通信过程中,需要保证时序正确和数据的完整性,以确保通信的稳定和可靠。
处理数据
在SPI通信中,STM32作为主机,需要与FPGA作为从机进行通信。FPGA可以通过配置SPI接口作为从机,在主机发起读写请求后,需要根据协议规定进行相应的数据处理,并将处理后的数据返回给主机。
具体来说,FPGA作为SPI从机,需要实现以下功能:
| 1、解析命令 | FPGA从机接收到主机发来的读取寄存器命令,根据协议规定解析命令,并确定需要读取的寄存器地址 |
| 2、读取寄存器 | FPGA从机根据确定的寄存器地址,读取相应的寄存器值,并将其缓存到一个数据缓存区中 |
| 3、数据处理 | FPGA从机对缓存区中的数据进行一些处理,如加密、校验等 |
| 4、发送响应数据 | FPGA从机将处理后的数据发送回主机,主机根据协议接收响应数据,并进行相应的处理 |
-
接收主机发来的读写命令:在接收到主机发来的读写命令后,需要根据协议规定解析命令,并根据读写请求读取/写入相应的寄存器或存储器。
-
处理读写数据:在接收到主机发来的读写数据后,需要对数据进行相应的处理,如校验、加密等操作。
-
发送响应数据:在处理完读写数据后,需要将处理结果返回给主机,根据协议规定发送响应数据。
总的来说,在SPI通信中,FPGA作为从机需要实现SPI接口的相应协议,并根据协议规定进行数据处理和发送响应数据,以完成与主机的通信。
在SPI通信中,FPGA可以作为从机,接收来自STM32主机的指令并执行相应的操作。FPGA内部有多个SPI模块,可以通过配置不同的寄存器来实现不同的功能。
以下是一个基本的FPGA从机的代码示例,它与STM32的主机通信并接收数据:
module spi_slave (
input wire clk,
input wire rst,
input wire [7:0] spi_in,
output reg [7:0] spi_out
);
reg [7:0] rx_data; // 存储接收到的数据
reg [7:0] tx_data; // 存储发送的数据
reg tx_valid; // 标志数据是否可以发送
reg rx_valid; // 标志数据是否接收完毕
// 定义SPI状态机,处理接收和发送操作
parameter IDLE = 0;
parameter RX = 1;
parameter TX = 2;
reg [1:0] state;
always @(posedge clk, posedge rst) begin
if (rst) begin
state <= IDLE;
rx_valid <= 0;
tx_valid <= 0;
spi_out <= 0;
tx_data <= 0;
end else begin
case (state)
IDLE: begin
if (spi_in[7] == 1) begin // 判断是否为接收模式
rx_data <= 0;
state <= RX;
end else if (tx_valid == 1) begin // 判断是否为发送模式
spi_out <= tx_data;
state <= TX;
end
end
RX: begin
rx_data <= {rx_data[6:0], spi_in[7]};
if (spi_in[7] == 0) begin
rx_valid <= 1;
state <= IDLE;
end
end
TX: begin
tx_data <= {tx_data[6:0], spi_in[7]};
if (spi_in[7] == 0) begin
tx_valid <= 0;
state <= IDLE;
end
end
endcase
end
end
// 接收完毕后将数据输出
always @(posedge clk, posedge rst) begin
if (rst) begin
spi_out <= 0;
end else begin
if (rx_valid == 1) begin
spi_out <= rx_data;
rx_valid <= 0;
end
end
end
// 发送数据的接口
task send_data;
input [7:0] data;
begin
tx_data <= data;
tx_valid <= 1;
end
endtask
endmodule
在此代码中,FPGA通过spi_in和spi_out输入和输出数据。可以设置spi_in的最高位来选择是接收还是发送模式,其余7位用于传输数据。如果最高位为1,则表示接收模式,FPGA会接收所有的数据,并将其存储到rx_data中。如果最高位为0,则表示发送模式,FPGA从tx_data寄存器中读取数据,并将其发送到spi_out中。可以使用send_data任务发送数据。当rx_data中存储的数据完全接收并解码完成后,数据会被输出到spi_out中,stm32主机可以读取这个数据。
使用这个代码,可以轻松实现STM32和FPGA之间的SPI通信。在STM32主机中,可以使用SPI发送指令和数据,FPGA接收并执行相应的操作,并在需要时发送数据。
关闭通信
SPI通信中,FPGA可以作为从设备与STM32作为主设备进行通信。FPGA作为从设备,接收STM32主设备发送的数据,在数据传输结束后需要给出结束信号,通知主设备通信已经结束。
一种典型的结束通信方法是在FPGA上产生一个特定的电平信号,称为片选信号(Chip Select,CS)。在SPI通信中,STM32主设备向FPGA发送数据时,需要先拉低片选信号,将FPGA从设备选中,然后发送数据。在数据传输结束后,STM32主设备再将片选信号拉高,通知FPGA从设备,通信已经结束。
具体实现方式有两种:
-
通过GPIO控制片选信号。在FPGA的设计中,通过将一个GPIO模块与SPI接口相连,用于控制片选信号。当STM32主设备需要进行数据传输时,会通过设定该GPIO模块的输出电平来控制片选信号的状态,从而实现SPI通信的开始和结束。
-
通过SPI协议进行控制。在SPI协议中,片选信号是一种特殊的信号,可以通过定义特定的通信协议,在通信过程中实现从设备发送片选信号。在数据传输结束时,FPGA从设备可以发送一个特定的片选信号,通知主设备通信已经结束。
以上是两种常用的结束通信方式,不同的实现方式适用于不同的应用场景,需要根据具体要求进行选择。
为什么要建立stm32与fpga之间的spi通信
FPGA与MCU相比有以下优势:
-
高度可编程性:FPGA可根据应用程序的要求进行高度定制化的编程。反之,MCU程序通常是确定的,难以修改或扩展。
-
处理能力:FPGA具有强大的并行处理能力,可以同时执行多个复杂的操作,而MCU则需要单独执行每个操作。
-
快速响应:FPGA芯片可以在微秒级别响应输入信号,而MCU需要一些时间来检测、解析和响应输入。
-
低功耗:使用FPGA芯片可以实现极低的功耗,因为它们只在需要时才会执行操作。相比之下,MCU通常需要一直运行以维持其功能。
-
应用场景:FPGA通常用于高速信号处理、数字信号处理、图像处理等应用领域,而MCU则更多用于低功耗、周期性处理、控制领域等。
文章来源地址https://www.toymoban.com/news/detail-853170.html文章来源:https://www.toymoban.com/news/detail-853170.html
到了这里,关于基于SPI实现stm32与fpga通信(一)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!