学物联网,来万物简单IoT物联网!!

一、产品简介
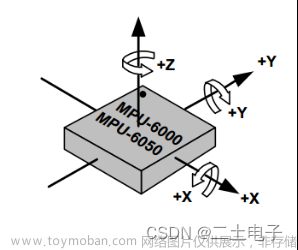
MPU6050是一款6轴运动传感器,它集成了3 轴MEMS 陀螺仪,3 轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C 或SPI 接口输出一个9 轴的信号。
MPU6050主要应用在智能手机、平板电脑、可穿戴设备、机顶盒、3D遥控器和游戏控制器等产品中。
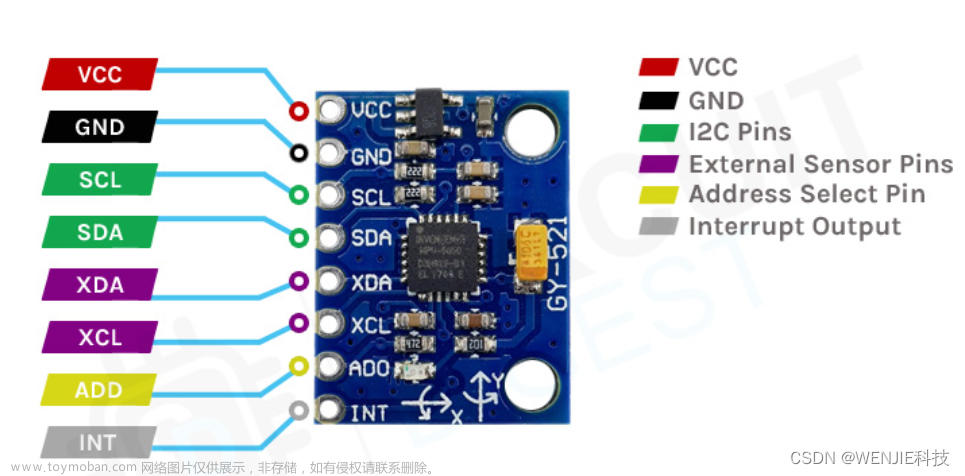
引脚定义
- VCC:电源正(5V)
- GND:电源地
- SCL:I2C时钟线,用于与主设备通讯
- SDA:I2C数据线,用于与主设备通讯
- XDA:I2C数据线,用于与拓展处理器通讯
- XCL:I2C时钟线,用于与拓展处理器通讯
- AD0:I2C地址控制引脚
- INT:中断上报引脚
二、技术参数
- 工作电压:2.375V~3.46V
- 睡眠电流:<=10uA@25°C
- 工作电流(Low-Noise Mode):
(1) 6轴(陀螺仪+加速度):<=3mA
(2) 3轴(加速度):<=370uA
(3) 3轴(陀螺仪):<=2.8mA - 工作温度:-40°C~+85°C
- 通信接口:400KHz I2C或10MHz SPI
- 三轴陀螺仪可编程范围:±250dps、±500dps、±1000dps和±2000dps
- 陀螺仪灵敏度误差:±1%
- 陀螺仪噪声:4mdps/√Hz
- 三轴加速度计可编程范围:±2g、±4g、±8g和±16g
- 加速度计噪声:100μg/√Hz
- 片上16位ADC和可编程滤波器
- 用户可编程中断
- 封装尺寸:LGA 3mm _ 3mm _ 0.75mm
三、软件接口
MPU6050(i2cObj) - 创建MPU6050驱动对象
- 函数原型:
MPU6050Obj = MPU6050(i2cObj)
- 参数说明:
| 参数 | 类型 | 必选参数? | 说明 |
|---|---|---|---|
| i2cObj | I2C | 是 | 传入I2C对象 |
- 返回值:
MPU6050对象成功,返回MPU6050对象;MPU6050对象创建失败,抛出Exception - 示例代码:
from machine import Pin,SoftI2C
from mpu6050 import MPU6050
i2cObj = SoftI2C(sda=Pin(25), scl=Pin(26)) # 创建i2c对象
mpu6050Obj = MPU6050(i2cObj, i2cAddr=0x68) # 创建mpu6050对象
getTemperature - 测量温度
- 函数功能:
量测周围温度并返回测量结果 - 函数原型:
MPU6050.getTemperature()
- 参数说明:
无 - 返回值:
成功返回温度测量结果(数据类型:浮点型;单位:摄氏度);失败抛出Exception - 示例:
from machine import Pin,SoftI2C
from mpu6050 import MPU6050
i2cObj = SoftI2C(sda=Pin(25), scl=Pin(26)) # 创建i2c对象
mpu6050Obj = MPU6050(i2cObj, i2cAddr=0x68) # 创建mpu6050对象
temp = mpu6050Obj.getTemperature()
print("temperature is ", temp, "°C")
- 输出:
temperature is 28.9°C
getAcceleration - 获取加速度值
- 函数功能:
获取传感器的加速度值 - 函数原型:
MPU6050.getAcceleration()
- 参数说明:
无 - 返回值:
成功返回加速度计的原始值数值,其数据类型为tuple (gx,gy,gz) ;失败抛出Exception - 示例:
from machine import Pin,SoftI2C
from mpu6050 import MPU6050
i2cObj = SoftI2C(sda=Pin(25), scl=Pin(26)) # 创建i2c对象
mpu6050Obj = MPU6050(i2cObj, i2cAddr=0x68) # 创建mpu6050对象
acc = mpu6050Obj.getAcceleration()
print(acc)
- 输出:
(7382, 14618, 3306)
getGyroscope - 获取陀螺仪值
- 函数功能:
获取传感器的陀螺仪值 - 函数原型:
MPU6050.getGyroscope()
- 参数说明:
无 - 返回值:
成功返回陀螺仪的原始值数值,其数据类型为tuple (gx,gy,gz) ;失败抛出Exception - 示例:
from machine import Pin,SoftI2C
from mpu6050 import MPU6050
i2cObj = SoftI2C(sda=Pin(25), scl=Pin(26)) # 创建i2c对象
mpu6050Obj = MPU6050(i2cObj, i2cAddr=0x68) # 创建mpu6050对象
gyro = mpu6050Obj.getGyroscope()
print(gyro)
- 输出:
(14, 9, -49)
四、接口案例
对于MPU6050而言,其 I2C 地址并不是完全确定的,开发者可以通过MPU6050的AD0引脚来决定其 I2C 通讯地址。 其DataSheet中相关的描述如下:
AD0是从I2C接口的地址控制引脚,该引脚控制I2C地址的最低位。如果接GND,则MPU60SO的IIC地址是:0x68,如果接VDD,则是0x69。
因此,开发者在配置和使用此段案例时,需注意ETT物联网开发板上内嵌MPU6050传感器,地址是:0x68。文章来源:https://www.toymoban.com/news/detail-854772.html
from machine import Pin,SoftI2C
from mpu6050 import MPU6050
i2cObj = SoftI2C(sda=Pin(25), scl=Pin(26)) # 创建i2c对象
mpu6050Obj = MPU6050(i2cObj, i2cAddr=0x68) # 创建mpu6050对象
acc = mpu6050Obj.getAcceleration()
print("The Acceleration data is:", acc)
gyro = mpu6050Obj.getGyroscope()
print("The Gyro data is: ", gyro)
- 输出:
Testing mpu6050 ...
The Acceleration data is: (7382, 14618, 3306)
The Gyro data is: (14, 9, -49)
参考文献及购买链接
[1] MPU6050六轴陀螺仪购买链接文章来源地址https://www.toymoban.com/news/detail-854772.html
到了这里,关于物联网AI MicroPython传感器学习 之 mpu6050六轴陀螺仪传感器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!