目录
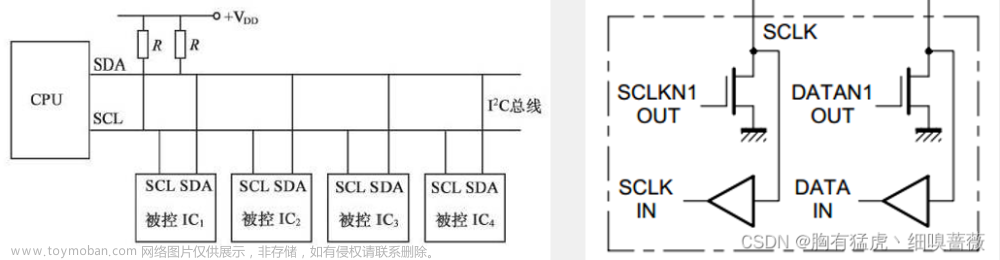
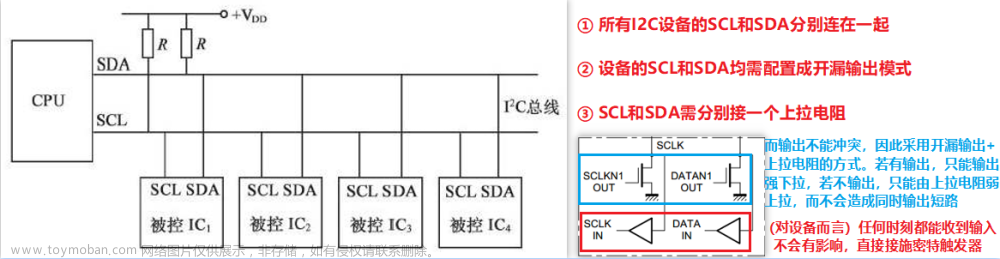
1、I2C简介
2、I2C时序单元
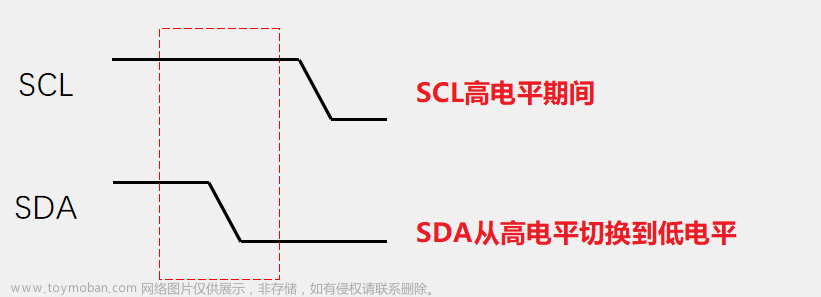
2.1 起始条件
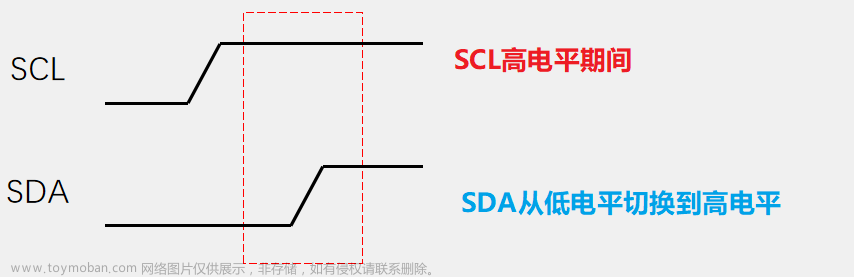
2.2 终止条件
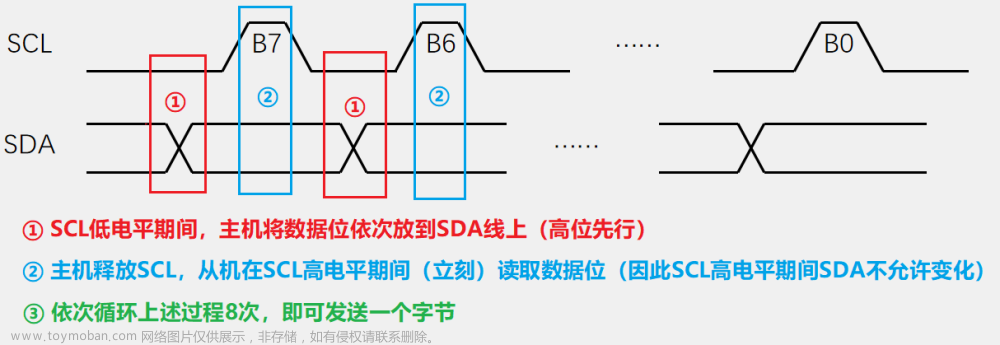
2.3 发送一个字节
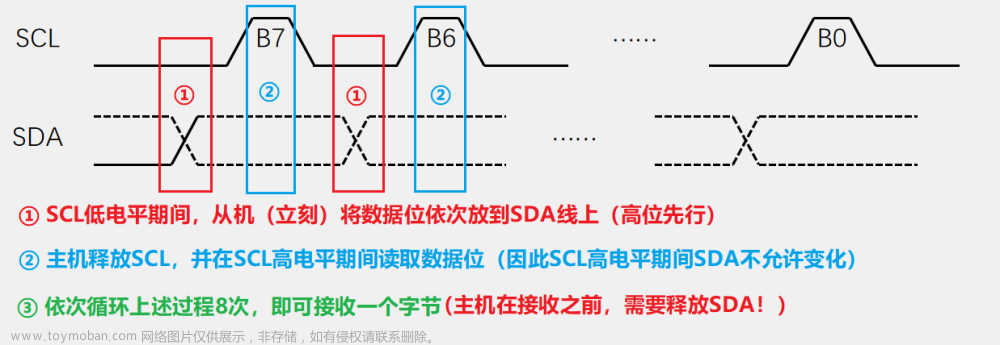
2.4 接收一个字节
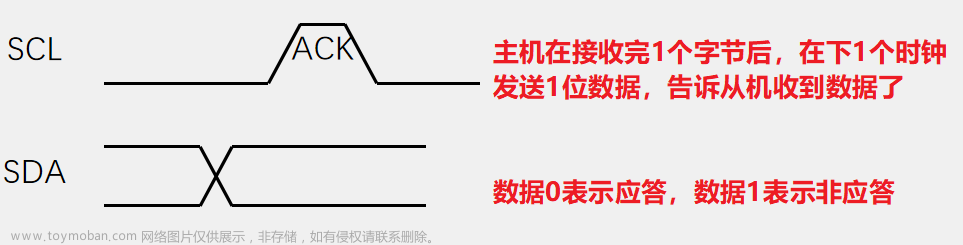
2.5 发送应答
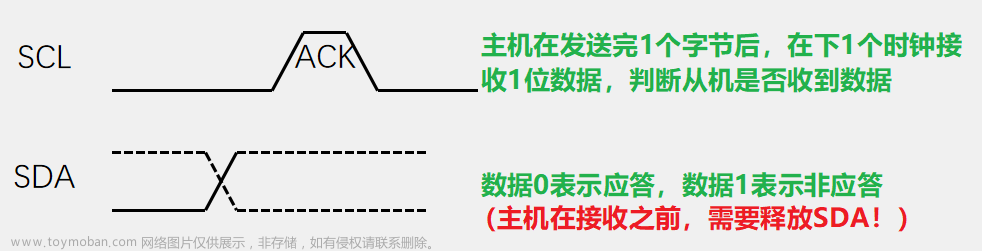
2.6 接收应答
3、I2C完整时序
3.1 指定地址写一个字节
3.2 当前地址读一个字节
3.2 指定地址读一个字节
4、简单软件I2C代码(HAL)
4.1 软件I2C
4.2 软件I2C读MPU6050寄存器
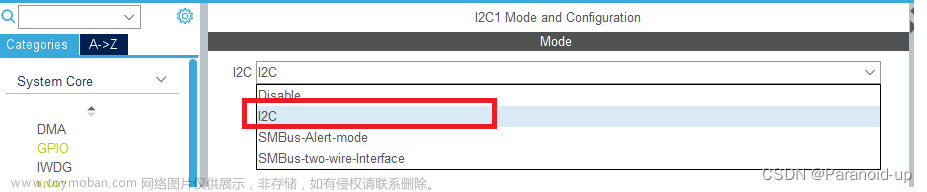
5、STM32硬件I2C
5.1 I2C外设框图
5.2 主机发送流程图
5.3 主机接收流程图
6、简单硬件I2C代码(HAL)
7、例程下载
1、I2C简介
2、I2C时序单元
2.1 起始条件
2.2 终止条件
2.3 发送一个字节
2.4 接收一个字节
2.5 发送应答
2.6 接收应答
3、I2C完整时序
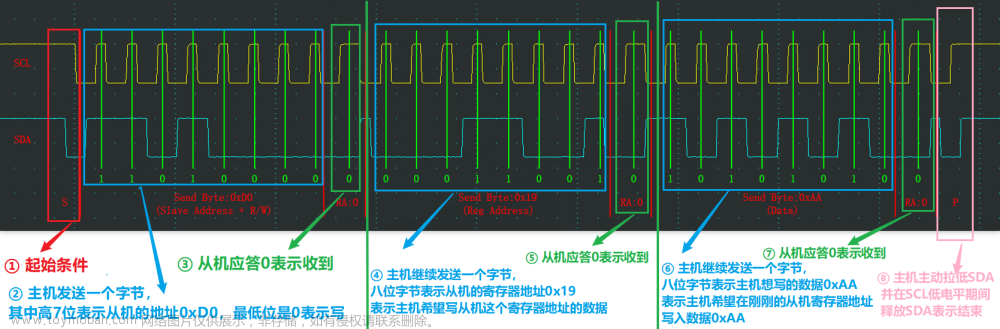
3.1 指定地址写一个字节
指定地址写一个字节的时序分析如下:
如果需要连续写多个字节,只需要最后主机不需要主动拉低SDA,并且重复⑥⑦步,直到写完所有字节,再执行⑧步即可。④~⑦步传输的数据含义是双方约定的,不一定是这个时序中的含义。
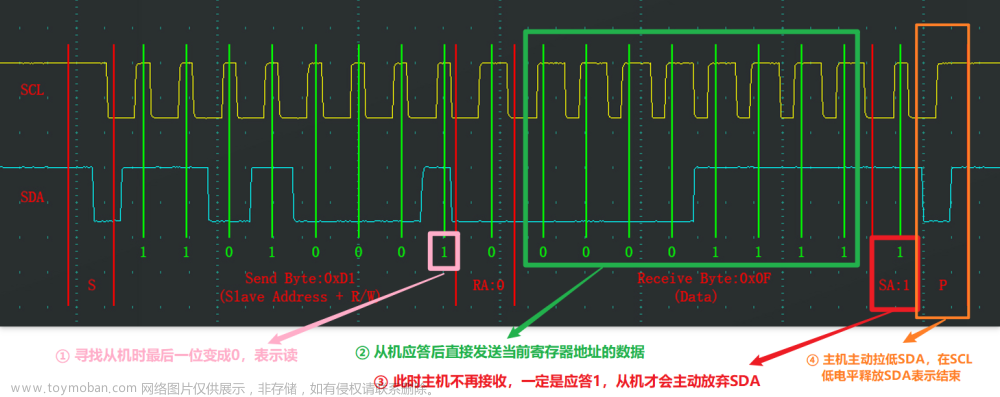
3.2 当前地址读一个字节
如果主机还需要继续接收,那么③步应答0,从机继续发送数据(重复②,但是寄存器地址会自增),直到主机不再需要读数据,那么执行③④步表示结束。
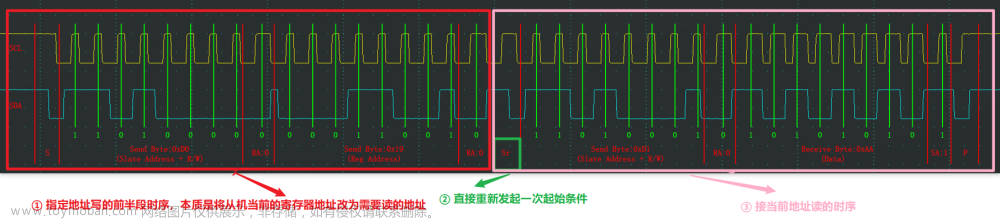
3.2 指定地址读一个字节
如果主机还需要继续接收,那么最后重复当前地址读中的③步应答0,从机继续发送数据(重复②,但是寄存器地址会自增),直到主机不再需要读数据,那么执行③④步表示结束。
4、简单软件I2C代码(HAL)
4.1 软件I2C
可以看到除了结束条件,任何一个时序单元,SCL都以低电平结束,便于拼接、避免错误
#include "stm32f1xx_hal.h"
#include "Dealy.h"
//PB6和PB7配置成普通开漏输出模式
#define SCL_PORT GPIOB
#define SDA_PORT GPIOB
#define SCL_PIN GPIO_PIN_6
#define SDA_PIN GPIO_PIN_7
/**
* 函 数:I2C写SCL引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SCL的电平,范围0~1
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SCL为低电平,当BitValue为1时,需要置SCL为高电平
*/
void MyI2C_W_SCL(uint8_t BitValue)
{
HAL_GPIO_WritePin(SCL_PORT, SCL_PIN, (GPIO_PinState)BitValue); //根据BitValue,设置SCL引脚的电平
Delay_us(10); //延时10us,防止时序频率超过要求
}
/**
* 函 数:I2C写SDA引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SDA的电平,范围0~0xFF
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SDA为低电平,当BitValue非0时,需要置SDA为高电平
*/
void MyI2C_W_SDA(uint8_t BitValue)
{
HAL_GPIO_WritePin(SDA_PORT, SDA_PIN, (GPIO_PinState)BitValue); //根据BitValue,设置SDA引脚的电平,BitValue要实现非0即1的特性
Delay_us(10); //延时10us,防止时序频率超过要求
}
/**
* 函 数:I2C读SDA引脚电平
* 参 数:无
* 返 回 值:协议层需要得到的当前SDA的电平,范围0~1
* 注意事项:此函数需要用户实现内容,当前SDA为低电平时,返回0,当前SDA为高电平时,返回1
*/
GPIO_PinState MyI2C_R_SDA(void)
{
GPIO_PinState BitValue;
BitValue = HAL_GPIO_ReadPin(SDA_PORT, SDA_PIN); //读取SDA电平
Delay_us(10); //延时10us,防止时序频率超过要求
return BitValue; //返回SDA电平
}
/*协议层*/
/**
* 函 数:I2C起始
* 参 数:无
* 返 回 值:无
*/
void MyI2C_Start(void)
{
MyI2C_W_SDA(1); //释放SDA,确保SDA为高电平
MyI2C_W_SCL(1); //释放SCL,确保SCL为高电平
MyI2C_W_SDA(0); //在SCL高电平期间,拉低SDA,产生起始信号
MyI2C_W_SCL(0); //起始后把SCL也拉低,即为了占用总线,也为了方便总线时序的拼接
}
/**
* 函 数:I2C终止
* 参 数:无
* 返 回 值:无
*/
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0); //拉低SDA,确保SDA为低电平
MyI2C_W_SCL(1); //释放SCL,使SCL呈现高电平
MyI2C_W_SDA(1); //在SCL高电平期间,释放SDA,产生终止信号
}
/**
* 函 数:I2C发送一个字节
* 参 数:Byte 要发送的一个字节数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++) //循环8次,主机依次发送数据的每一位
{
MyI2C_W_SDA(Byte & (0x80 >> i)); //使用掩码的方式取出Byte的指定一位数据并写入到SDA线
MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间读取SDA
MyI2C_W_SCL(0); //拉低SCL,主机开始发送下一位数据
}
}
/**
* 函 数:I2C接收一个字节
* 参 数:无
* 返 回 值:接收到的一个字节数据,范围:0x00~0xFF
*/
GPIO_PinState MyI2C_ReceiveByte(void)
{
uint8_t i;
GPIO_PinState Byte = (GPIO_PinState)0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到
MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送
for (i = 0; i < 8; i ++) //循环8次,主机依次接收数据的每一位
{
MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDA
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);} //读取SDA数据,并存储到Byte变量
//当SDA为1时,置变量指定位为1,当SDA为0时,不做处理,指定位为默认的初值0
MyI2C_W_SCL(0); //拉低SCL,从机在SCL低电平期间写入SDA
}
return Byte; //返回接收到的一个字节数据
}
/**
* 函 数:I2C发送应答位
* 参 数:Byte 要发送的应答位,范围:0~1,0表示应答,1表示非应答
* 返 回 值:无
*/
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit); //主机把应答位数据放到SDA线
MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间,读取应答位
MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
}
/**
* 函 数:I2C接收应答位
* 参 数:无
* 返 回 值:接收到的应答位,范围:0~1,0表示应答,1表示非应答
*/
GPIO_PinState MyI2C_ReceiveAck(void)
{
GPIO_PinState AckBit; //定义应答位变量
MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送
MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDA
AckBit = MyI2C_R_SDA(); //将应答位存储到变量里
MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
return AckBit; //返回定义应答位变量
}
4.2 软件I2C读MPU6050寄存器
#include "stm32f1xx_hal.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(Data); //发送要写入寄存器的数据
MyI2C_ReceiveAck(); //接收应答
MyI2C_Stop(); //I2C终止
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_Start(); //I2C重复起始
MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取
MyI2C_ReceiveAck(); //接收应答
Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据
MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出
MyI2C_Stop(); //I2C终止
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}
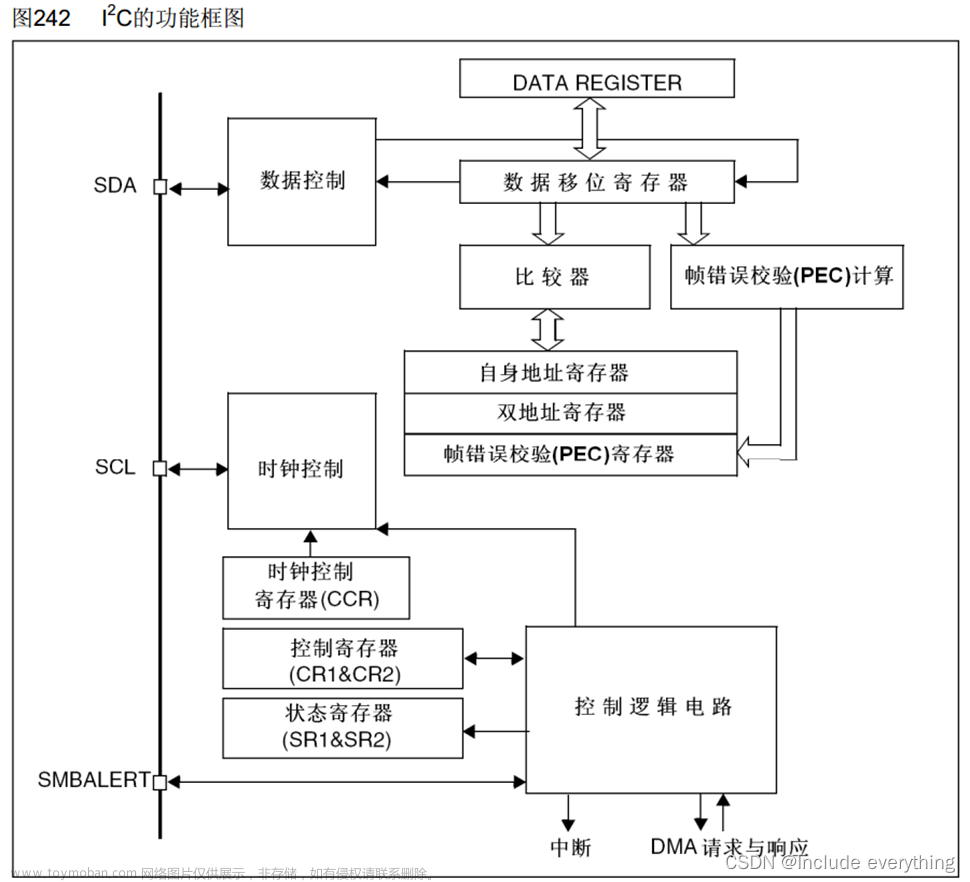
5、STM32硬件I2C
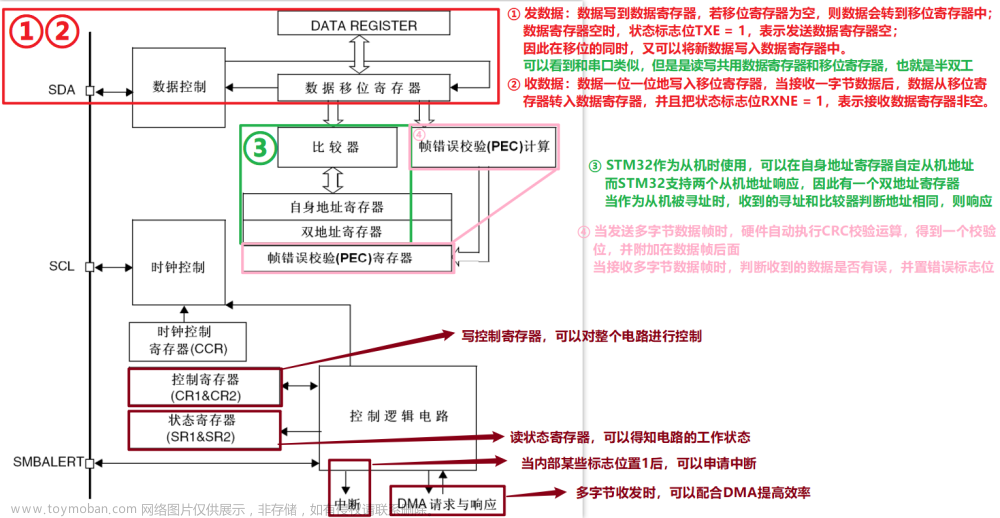
5.1 I2C外设框图
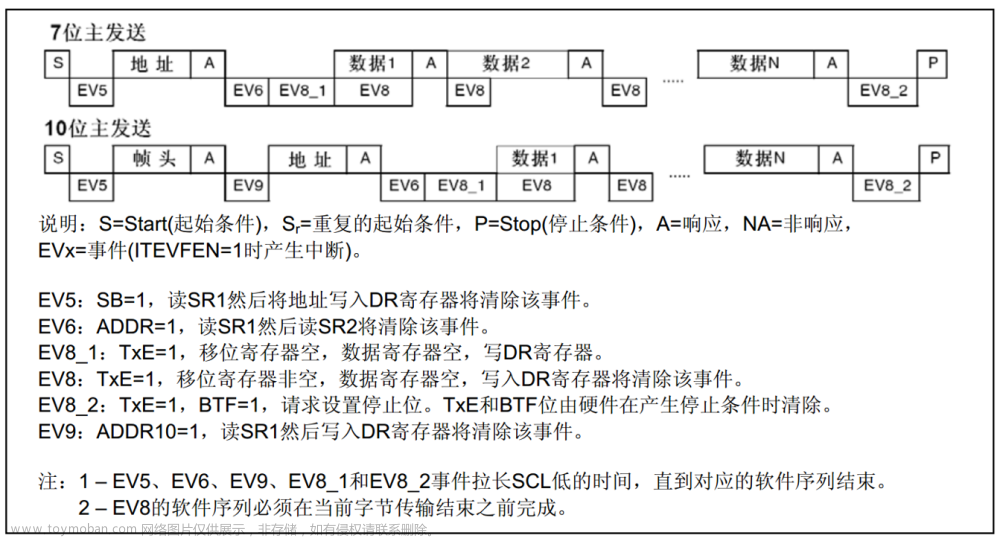
5.2 主机发送流程图
5.3 主机接收流程图
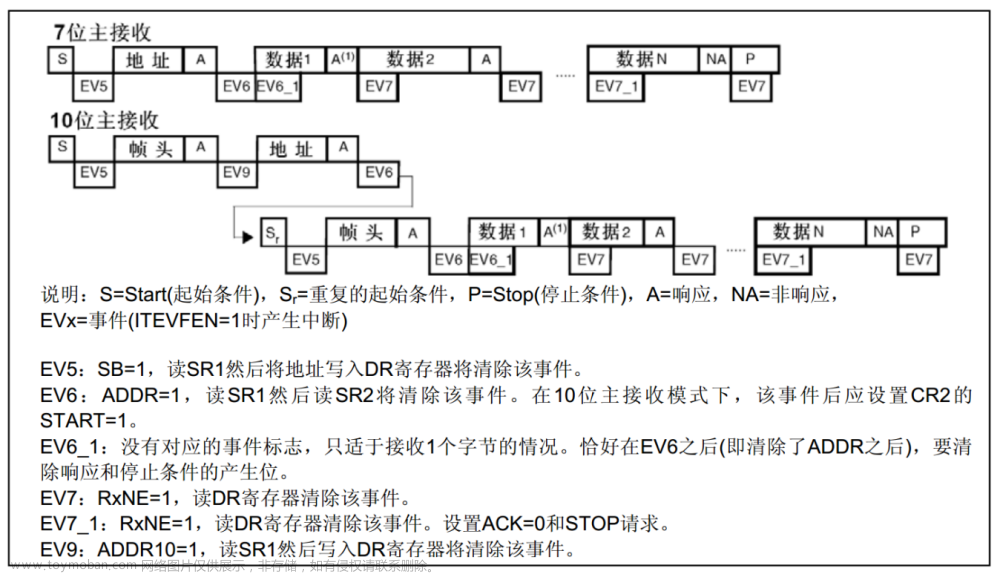
总之,就是看上去比较复杂,实际上只需要写入控制寄存器CR或者数据寄存器DR,就可以控制时序单元的产生;时序单元发生后,查看相应的EV事件(检查状态寄存器SR),等待时序单元完成依次循环,也就是操作----等待----操作----等待......
6、简单硬件I2C代码(HAL)
#include "stm32f1xx_hal.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址
extern I2C_HandleTypeDef hi2c1;
static I2C_HandleTypeDef* hi2c_MPU6050 = &hi2c1;
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
//MyI2C_Start(); //I2C起始
//MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_SendByte(RegAddress); //发送寄存器地址
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_SendByte(Data); //发送要写入寄存器的数据
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_Stop(); //I2C终止
HAL_I2C_Master_Transmit(hi2c_MPU6050, MPU6050_ADDRESS, (uint8_t*)RegAddress, 1, 10000);
HAL_I2C_Master_Transmit(hi2c_MPU6050, MPU6050_ADDRESS, &Data, 1, 10000);
//或者直接指定地址写:
//HAL_I2C_Mem_Write(hi2c_MPU6050, MPU6050_ADDRESS, RegAddress, 1, &Data, 1, 10000);
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
//MyI2C_Start(); //I2C起始
//MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_SendByte(RegAddress); //发送寄存器地址
//MyI2C_ReceiveAck(); //接收应答
//MyI2C_Start(); //I2C重复起始
//MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取
//MyI2C_ReceiveAck(); //接收应答
//Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据
//MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出
//MyI2C_Stop(); //I2C终止
HAL_I2C_Mem_Read(hi2c_MPU6050, MPU6050_ADDRESS, RegAddress, 1, &Data, 1, 10000);
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}
7、例程下载
链接:https://pan.baidu.com/s/1XFT_WHGA8Nsf7Q52niipnw?pwd=1145
提取码:1145文章来源:https://www.toymoban.com/news/detail-854852.html
师承江科大,大部分截图为江科大PPT截图修改,例程由江科大标准库代码改为HAL库文章来源地址https://www.toymoban.com/news/detail-854852.html
到了这里,关于01_STM32软件+硬件I2C读取MPU6050(HAL库)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!