串口发送

#include "stm32f10x.h" // Device header
#include<stdio.h>
#include<stdarg.h>
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //片上外设,复用推免
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate = 9600; //波特率
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx; //启用发送
USART_InitStruct.USART_Parity = USART_Parity_No;
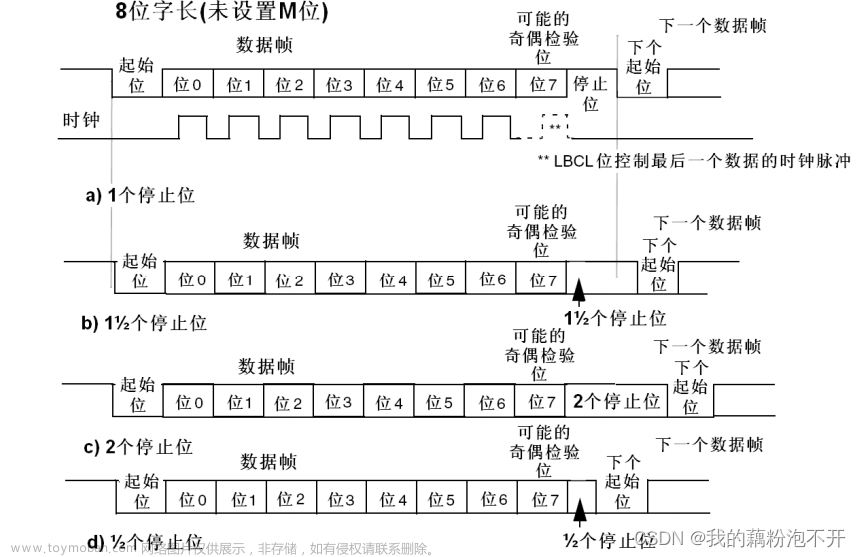
USART_InitStruct.USART_StopBits = USART_StopBits_1;//指定传输的停止位数
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&USART_InitStruct);
USART_Cmd(USART1,ENABLE);
}
void Serial_SendByte(uint8_t Byte) //发送数据函数
{
USART_SendData(USART1,Byte);//调用后byte就写入TDR
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待标志位,且下一次标志位会清零
}
void Serial_SendArray(uint8_t *Array,uint16_t length)//传数组
{
for(int i= 0;i<length;++i)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)//发送字符串
{
uint8_t i;
for(int i = 0; String[i] != '\0';++i)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t x,uint8_t y)
{
uint32_t Result = 1;
while(y--)
{
Result *= x; //表示取x的y次方
}
return Result;
}
//发送数字的逻辑
void Serial_SendNumber(uint32_t Num,uint8_t len)//发送一个数字以字符串返回
{
uint8_t i;
for(i = 0;i<len;i++)
{
Serial_SendByte(Num / Serial_Pow(10, len - i - 1) % 10 + '0');//+字符偏移
}
}
//printf函数在打印的时候在不断调用底层fputc
int fputc(int ch,FILE *f)//对printf函数重定向到串口
{
Serial_SendByte(ch);
return ch;
}
//1.定义一个函数,最后一个参数为省略号,省略号前面可以设置自定义参数
//2.在函数定义中创建一个 va_list 类型变量\n\n该类型是在 stdarg.h 头文件中定义的
//3.使用 int 参数和 va_start 宏来初始化 va_list 变量为一个参数列表\n\n宏 va_start 是在 stdarg.h 头文件中定义的
//4.使用 va_arg 宏和 va_list 变量来访问参数列表中的每个项
//5.使用宏 va_end 来清理赋予 va_list 变量的内存
//用来接收格式化字符串 省略号代表,传递可变数量的参数
void Serial_Printf(char *format,...)//多个串口用printf
{
char String[100];
va_list arg;//定义参数列表变量
va_start(arg,format);
vsprintf(String,format,arg);
va_end(arg);//释放参数表
Serial_SendString(String);
}
串口库函数
//配置同步时钟输出 时钟是否输出,时钟的极性相位等参数
void USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct);
void USART_ClockStructInit(USART_ClockInitTypeDef* USART_ClockInitStruct);
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
//开启DMA的触发通道
void USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState);
//设置地址
void USART_SetAddress(USART_TypeDef* USARTx, uint8_t USART_Address);
//唤醒单元
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
uint8_t KeyNum;
int main(void)
{
//使用RCC开启GPIO的时钟
//使用GPIO_Init函数初始化GPIO
//使用输入输出的函数控制GPIO口
OLED_Init();
Serial_Init();
Serial_SendByte('B');
//uint8_t arr[] = {0x41,0x42,0x43};
// Serial_SendNumber(12345,5);
//printf("num = %d",123);
char String[100];
//sprintf(String,"num = %d\n",999);//将999写入String C语言可变参数
//Serial_SendString(String);
//Serial_Printf("num = %d\n",999);
//--no-multibyte-chars
Serial_Printf("你好");
while(1)
{
}
}
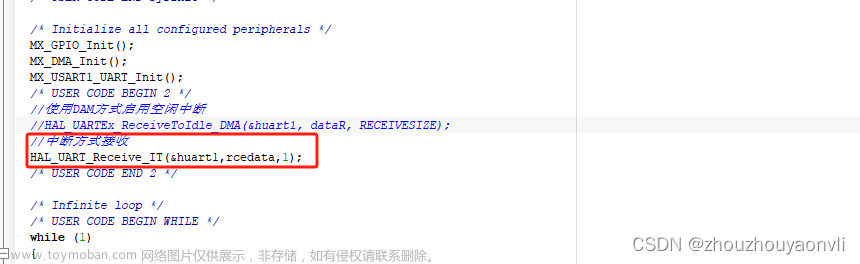
数据模式


#include "stm32f10x.h" // Device header
#include<stdio.h>
#include<stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //片上外设,复用推免
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//配置接收
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; //片上外设,上拉输入:开始为高电平
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate = 9600; //波特率
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx|USART_Mode_Rx; //启用发送/和接收
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;//指定传输的停止位数
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&USART_InitStruct);
//选择中断源
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
//配置优先级分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//使用中断
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
USART_Cmd(USART1,ENABLE);
}
//发送/接收和上面一样,自己添加
//.....
//.....
uint8_t Serial_GetRxFlag(void)
{
if(Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
//配置中断函数
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET)
{ //如果已经发生中断,就清空
Serial_RxData = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
HEX数据包

文本数据包

HEX数据包接收


串口收发HEX数据包
#include "stm32f10x.h" // Device header
#include<stdio.h>
#include<stdarg.h>
uint8_t Serial_TxPacket[4]; //FF 01 02 03 04 FE
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
//RCC和GPIO配置和上面一样
//串口配置和上面一样
//中断配置和上面一样
USART_Cmd(USART1,ENABLE);
}
//数据收发部分自己写
//....
//....
void Serial_SendPacket(void)
{
Serial_SendByte(0xFF);
Serial_SendArray(Serial_TxPacket, 4);
Serial_SendByte(0xFE);
}
uint8_t Serial_GetRxFlag(void) //判断是否有数据报
{
if(Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
//配置中断函数
void USART1_IRQHandler(void)
{ //利用状态姐接收数据包
static uint8_t RXState = 0;
static uint8_t pRxPacket = 0; //数据包长度
if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET)
{ //如果已经发生中断,就清空
uint8_t RxData = USART_ReceiveData(USART1);
if(RXState == 0)
{
if(RxData == 0xFF) //判断包头
{
RXState = 1;
pRxPacket = 0;
}
}
else if(RXState ==1)
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket++;
if(pRxPacket>= 4)
{
RXState = 2;
}
}
else if(RXState == 2)
{
if(RxData == 0xFE) //判断包尾
{
RXState = 0;
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"
uint8_t RxDaTa;
uint8_t keynum;
int main(void)
{
//使用RCC开启GPIO的时钟
//使用GPIO_Init函数初始化GPIO
//使用输入输出的函数控制GPIO口
OLED_Init();
Key_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
Serial_TxPacket[0] = 0x01;
Serial_TxPacket[1] = 0x02;
Serial_TxPacket[2] = 0x03;
Serial_TxPacket[3] = 0x04;
while (1)
{
keynum = Key_GetNum();
if(keynum == 1)
{
Serial_TxPacket[0]++;
Serial_TxPacket[1]++;
Serial_TxPacket[2]++;
Serial_TxPacket[3]++;
Serial_SendPacket();
OLED_ShowHexNum(2, 1, Serial_TxPacket[0], 2);
OLED_ShowHexNum(2, 4, Serial_TxPacket[1], 2);
OLED_ShowHexNum(2, 7, Serial_TxPacket[2], 2);
OLED_ShowHexNum(2, 10, Serial_TxPacket[3], 2);
}
if (Serial_GetRxFlag() == 1)
{
OLED_ShowHexNum(4, 1, Serial_RxPacket[0], 2);
OLED_ShowHexNum(4, 4, Serial_RxPacket[1], 2);
OLED_ShowHexNum(4, 7, Serial_RxPacket[2], 2);
OLED_ShowHexNum(4, 10, Serial_RxPacket[3], 2);
}
}
}
串口收发文本数据包

void USART1_IRQHandler(void)
{
static uint8_t RXState = 0;
static uint8_t pRxPacket = 0; //数据包长度
if(USART_GetITStatus(USART1,USART_IT_RXNE) == SET)
{ //如果已经发生中断,就清空
uint8_t RxData = USART_ReceiveData(USART1);
if(RXState == 0)
{
if(RxData == 0xFF) //判断包头
{
RXState = 1;
pRxPacket = 0;
}
}
else if(RXState ==1)
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket++;
if(pRxPacket>= 4)
{
RXState = 2;
}
}
else if(RXState == 2)
{
if(RxData == 0xFE) //判断包尾
{
RXState = 0;
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"
uint8_t RxDaTa;
uint8_t keynum;
int main(void)
{
//使用RCC开启GPIO的时钟
//使用GPIO_Init函数初始化GPIO
//使用输入输出的函数控制GPIO口
OLED_Init();
Key_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
Serial_TxPacket[0] = 0x01;
Serial_TxPacket[1] = 0x02;
Serial_TxPacket[2] = 0x03;
Serial_TxPacket[3] = 0x04;
while (1)
{
keynum = Key_GetNum();
if(keynum == 1)
{
Serial_TxPacket[0]++;
Serial_TxPacket[1]++;
Serial_TxPacket[2]++;
Serial_TxPacket[3]++;
Serial_SendPacket();
OLED_ShowHexNum(2, 1, Serial_TxPacket[0], 2);
OLED_ShowHexNum(2, 4, Serial_TxPacket[1], 2);
OLED_ShowHexNum(2, 7, Serial_TxPacket[2], 2);
OLED_ShowHexNum(2, 10, Serial_TxPacket[3], 2);
}
if (Serial_GetRxFlag() == 1)
{
OLED_ShowHexNum(4, 1, Serial_RxPacket[0], 2);
OLED_ShowHexNum(4, 4, Serial_RxPacket[1], 2);
OLED_ShowHexNum(4, 7, Serial_RxPacket[2], 2);
OLED_ShowHexNum(4, 10, Serial_RxPacket[3], 2);
}
}
}
(FlyMcu)利用串口下载程序

2.
将跳线帽置在boot1 按复位键,点击开始编程即可。
由于该单片机只有串口1支持串口烧录。因此连接线连在串口1的所在的引脚上。
程序加载到bootloader完成后,再将跳线帽换到boot0,按复位键
为什么可以使用串口下载?
原理是实现程序的自我更新,即利用bootloader(程序代码),更新程序存储器。
串口下载的过程:Bootloader接收usart1的数据,刷新程序存储器。这时主程序处于瘫痪状态,主程序更新完成再启动主程序,执行新程序。
那为什么切换boot引脚,为什么每次要复位?
Boot0时,启动时主闪存存储器
Boot1时,启动再系统存储器
而Bootloader在更新系统存储器时需要切换到boot1,而更新完成运行更新后的主闪存存储器需要切换到Boot0。
而由于sysclk的第四个上升沿,Boot引脚会被锁定,因此每次都需要复位。配置新得启动模式。
每次下载都要切换跳线帽,太麻烦了,怎么解决?
1.设计一个外置电路。利用程序控制Boot0和Boot1 的切换文章来源:https://www.toymoban.com/news/detail-855582.html
为什么要使用串口下载?
- 比如使用烧录器烧录时,使得某个IO口失能,可以利用串口下载将它改回来。
- 读取flash中的程序(可用于读取他人flash的程序)

选项字节
存储不随程序变化而变化的参数。 就是一直爆出不变的参数
读保护,保护程序不被读出。
写保护,就无法再写入。
硬件参数,用户参数
STLK Utlity
:可以读取bin文件
:选项字节的配置文章来源地址https://www.toymoban.com/news/detail-855582.html
到了这里,关于【江科大】STM32:串口HEX/文本数据接收和发送(代码部分)(下)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!