在新质生产力高质量发展的要求下,中国移动在“人工智能+”和 “数据要素X”方面不断发力,持续发布高质量电信数据集。围绕网元智能、运维智能、服务智能三大方向建设,涵盖无线信道、基站、云网、核心网、哑资源等多领域,支持感知、诊断、预测、决策、大模型等多类网络AI能力研发的标志性数据集。相关数据集均由智慧网络开放创新平台承载。
中国移动 - 智慧网络新一代人工智能开放创新平台https://jiutian.10086.cn/open/
智慧海港天线与智能超表面(RIS)规划
中国移动 - 智慧网络新一代人工智能开放创新平台https://jiutian.10086.cn/open/#/taskParticulars/720007/?cid=147
杂信道环境的无线信道状态信息数据及仿真环境,提供了丰富的公共信道数据集和用户自构建数据集,用户可自由组合数据集用于AI模型训练。平台还提供了仿真验证环境,可通过系统仿真得出AI模型的效果指标和对无线网络的性能影响。
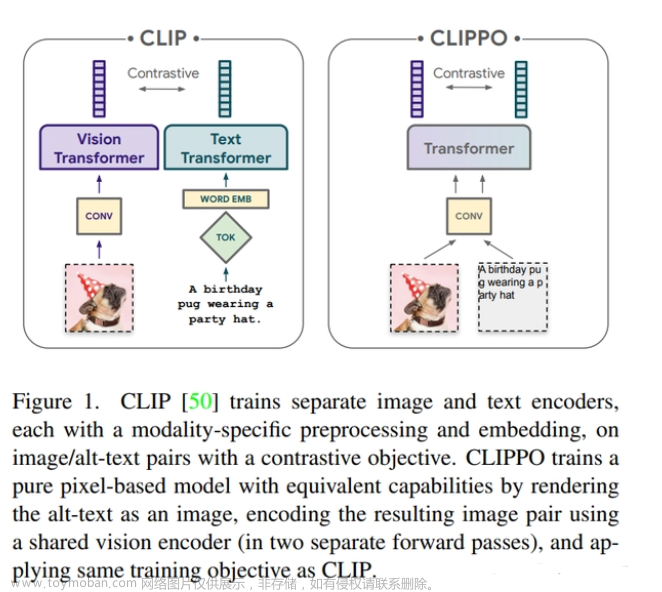
下面详细介绍引自智慧网络开放创新平台官网 基于AI的CSI压缩反馈介绍页面
任务、数据集、代码资源
特色优势
背景介绍
在海港场景中,通过无线通信技术能够实现无人集卡远程智慧驾驶,赋能智慧海港建设。无人集卡对移动轨迹上的网络质量要求较高,如何保证站址规划结果满足多变的海港环境(集装箱,龙门吊,无人集卡动态变化),是网络规划的难点及重点。
本任务基于真实海港场景,构建了一套高精度的海港场景数字孪生能力,包括基站,无线信道,终端,业务孪生建模,并提供智能超表面(RIS)孪生能力,支撑动态变化的海港场景网络规划及效果验证。该任务不仅提供了海港场景的通信仿真能力和 AI 模型验证能力,还开放了丰富的多维度数据集。本任务是由中国移动联合中兴通讯在无线网络数字孪生技术领域开展的攻关研发任务之一。
任务介绍
在 500m * 300m 大小的海港场景下,基于提供的多样的集装箱、场桥和岸桥环境、网络规划结果及对应的覆盖、性能指标等数据集(详见数据集介绍),设计一种 AI 算法对海港场景的天线和 RIS 的个数、工程参数及初始 SSB 波束配置进行寻优,使海港区域覆盖和网络性能指标(如上行吞吐率 / 资源耗费 / RSRP / SINR 等)达到最优,最后调用高精度仿真平台对寻优结果在对应海港场景、某条无人集卡轨迹路线上进行多维指标评估。
平台提供如下功能:
1. 提供 AI 研发环境
2. 丰富的、持续扩充的真实环境海港数据集
3. 自主研发结合 RIS 的高精度全协议栈的仿真验证环境
4. 提供高效仿真平台:多小区多用户仿真时长缩放比为 1(仿真时长):10(真实耗时)左右
5. 多维通信指标可对 AI 模型进行在线推理验证、评估
注:本文中出现的智慧海港场景相关名词释义如下:
集装箱:海港上分布的箱体,大型货物运输容器,如下图 1 中小方块,常见形态如图 2 中右侧示例
场桥、岸桥:场桥指堆货区用的桥式搬运设备,用于内场货物搬运;岸桥指岸边用的桥式设备,用于将集装箱从船舶装卸到码头
无人集卡(集装箱卡车):搭载集装箱运输的无人驾驶卡车
龙门吊:移动的吊车,可以用于移动集装箱
堆场:海港用于保管和交接集装箱的场地,本任务中涉及四个堆场的数据,参考图 3 示例
堆场负荷:用于评估堆场内集装箱的拥挤程度:堆场负荷 = 当前堆场集装箱个数 / 堆场内集装箱满载个数

任务定义
海港网络环境包含基站、RIS、集装箱、龙门吊等,其中 1 个基站至少 1 个小区(天线),天线和 RIS 分布在海港中,集装箱分布在图 3 四个堆场中,无人集卡沿着图 3 中的路线移动,无人集卡接入小区后做上行视频回传业务。
本任务要求在动态的海港场景中对天线和 RIS 的个数、工程参数及小区初始 SSB 波束配置进行寻优,旨在通过设计 AI 算法找出最优参数配置结果,期望能够在最少的站点耗费下,使海港场景多种集装箱负荷下的覆盖和网络性能综合最优。
本任务提供了海港场景下多种集装箱负荷下的小区和 RIS 的个数、工程参数及初始 SSB 波束配置信息,以及每种场景下的覆盖和网络性能指标等组合生成的数据集。用户可利用数据集选取合适的算法模型进行训练和测试,最终生成一套符合本任务要求的输出参数。本任务提供海港场景高精度孪生仿真平台,可调用平台输出多维指标对算法进行评估及打分,其中,本任务要求输出参数包括:
1. 站址规划参数
包括:小区和 RIS 个数,每个小区和 RIS 天线位置(X,Y坐标),高度,下倾角,方位角
2. 初始 SSB 规划参数
包括:每个小区 1 个 SSB 子波束的水平波束 3db 宽度,垂直波束 3db 宽度
表1 无线仿真参数释义
| 参数中文名 | 参数英文名 | 单位 | 取值范围 |
|---|---|---|---|
| 小区个数 | cell_num | - | 1~2 |
| RIS 个数 | ris_num | - | 0~1 |
| 小区n 天线位置 X 坐标 | CoordinatesXOfAntenna | m | 0~255 |
| 小区n 天线位置 Y坐标 | CoordinatesYOfAntenna | m | 0~355 |
| 小区n 天线高度 | HeightOfAntenna | m | 3~12 |
| 小区n SSB 的水平波束 3dB 宽度 | HHBWOfSSB | 度 | 6~90 |
| 小区n SSB 的垂直波束 3dB 宽度 | VHBWOfSSB | 度 | 6~58 |
| 小区n 下倾角 | DowntiltOfAntenna | 度 | -15~15 |
| 小区n 方位角 | OrientationOfAntenna | 度 | 0~360 |
| 第 k 个 RIS 的 X 坐标 | CoordinatesXOfRIS | m | 0~255 |
| 第 k 个 RIS 的 Y 坐标 | CoordinatesYOfRIS | m | 0~355 |
| 第 k 个 RIS 的高度 | HeightOfRIS | m | 3~10 |
| 第 k 个 RIS 的下倾角 | DowntiltOfRIS | 度 | -15~15 |
| 第 k 个 RIS 的方位角 | OrientationOfRIS | 度 | 0~360 |
注:
1. 在调用仿真平台进行评估打分时,需严格按表格中参数顺序提供输入参数,并保证参数在取值范围内,格式为 dataframe
2. 参数均为 float 类型,保留小数点后 1 位
举例图 4:当寻优出 2 个小区和 1 个 RIS 时需要验证的寻优参数打印出的 dataframe:
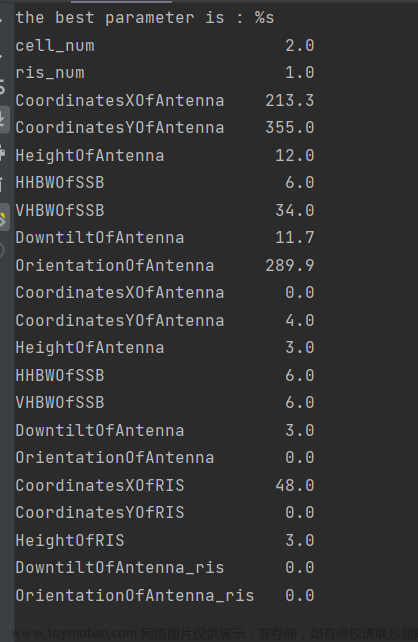
图4 输出参数格式 dataframe 示例,左侧为列名,右侧为数值
任务目标
该任务希望设计一套 AI 算法可以在海港中动态集装箱负荷中寻优出最优的小区和 RIS 的个数、工程参数及初始 SSB 波束配置,以使各种海港场景中无人集卡轨迹点上如下指标最优(参数评估要求参见评测标准页面介绍):
1. 对覆盖的影响 RSRP / SINR
2. 网规优化方案对网络性能指标(上行吞吐率等)的影响
3. 网规优化方案中对资源的消耗
数据集使用说明
本任务提供 2 套数据,用户可根据研究需要,二选一得到训练数据集,初次使用建议选择已处理好的数据 2。
1. 数据 1 - data_entire:全量未处理原始数据,包含集装箱、场桥和岸桥状态信息、小区和 RIS 规划结果、无人集卡轨迹路线信息、覆盖和网络性能指标等。内容介绍详见本页面“附录:数据 1 内容说明”;
2. 数据 2 - data_lightweight:已处理后的训练数据:data_train(小区和 RIS 规划结果)、data_result_train(性能指标),训练数据样本量为 6w+ 条,数据维度分别为 62048 * 21(62048 种规划结果组合,每种组合有 21 个参数维度),62048 * 5(62048 种规划结果组合下的性能指标)。
数据集文件说明如下:
智慧海港的天线与RIS智能规划.zip
- data_entire /
- data /
- Action
- Result
- Scenario
- data /
- data_lightweight /
- data_result_train.csv
- data_train.csv
注:
1. 数据 2 为处理后的简化数据,研究者可基于数据 1 提取更丰富的能表征海港的特征,该任务要求研究者尽量训练泛化性较高的模型,使海港中多种集装箱负荷场景上各项指标均达到较好效果
2. 测试数据由本平台封装,在进行测试时会自动获取测试数据
3. 【重要】 用户寻优得到的最优参数组合需满足参数配置范围才能调用仿真平台验证,否则会提示“重新进行寻优”,参数配置范围见“任务简介 - 表1 无线仿真参数释义”介绍
4. 每个用户每天只能调用一次仿真平台进行评估打分,平台会提示用户选择是否继续进行仿真调用验证
仿真平台介绍
该任务涉及的仿真能力由中兴通讯高精度孪生仿真平台提供,该平台具有以下功能及特色:
1. 基于通用服务器对海港场景及基站、无线信道、终端、业务进行孪生建模,打造基于实体网络的高精度数字孪生体,孪生相似度超过 90%
2. 可支持上层 AI 模型灵活调用,支撑智慧海港天线和 RIS 规划结果的验证
3. 支持覆盖、网络性能指标、资源消耗等多维度仿真结果,可实时调用评估算法效果
附录:数据 1 内容说明
数据 1 包含 3 个文件夹:
1. 海港环境状态文件夹 Scenario
表征海港环境状态,包括不同堆场负荷下集装箱位置和高度、龙门吊位置等环境数据。文件夹以 Scenario_id 命名,Scenario_id 文件夹内包含 堆场.csv、龙门吊.csv 两个文件。堆场.csv 文件中包含 4 个堆场信息,每个堆场有 51 * 12 个位置可以堆放集装箱,每个位置上的数字代表第 i 个堆场对应位置上的集装箱的堆叠数目,因此该 csv 文件的维度为 51 * 48。
注:csv 中每个位置的划分参考图 5 海港建模方法
2. 小区和RIS规划结果文件夹 Action
包括天线和 RIS 的个数、工程参数、初始 SSB 波束配置数据。文件以 action_id 命名,action_id 无实际意义,用于区分不同的参数配置组合,如 0、1、2 等,可用于和 Scenario_id 结合索引性能指标,相关数据示例如下:
表2 Action 文件示例
| 数据字段 | 类型 | x | y | z | 波束水平波宽 | 波束垂直波宽 | 天线方位角 | 天线下倾角 |
|---|---|---|---|---|---|---|---|---|
| 行1 | 0(天线) | 15 | 35 | 5 | 30 | 10 | 10 | 5 |
| 行2 | 1(RIS) | 105 | 50 | 3 | NaN | NaN | 210 | 4 |
注:天线和 RIS 的 x、y、z 分别代表天线和 RIS 在建模系统的位置坐标及高度,RIS 无需规划波束水平波宽,垂直波宽参数
3. 输出指标文件夹 Result
对应 Scenerio场景结合 Action 下的性能指标数据,以 scenario_id_action_id 命名。举例:Scenario_id=10,action_id=1 下的指标文件为 10_1.csv,表示在场景 id 为 10 且动作 id 为 1 的情况下的网络性能指标,相关数据字段如下:
表3 Result 文件示例
| X | Y | rsrp | sinr_dl | sinr_ul | tput_dl | tput_ul | 举例 | |
|---|---|---|---|---|---|---|---|---|
| 行1 | 10 | 12 | -86 | NaN | NaN | NaN | NaN | 非轨迹点 |
| 行2 | 34 | 15 | -89 | 12 | 6 | 67 | 47 | 轨迹点 |
注:当 rsrp、sinr_dl、sinr_ul、tput_dl、tput_ul 均为非 NaN 时为轨迹点,其他情况为非轨迹点
一行代表一个数据点,各列参数解释如下:
表4 参数解释
| 参数名 | 单位 | 含义 |
|---|---|---|
| X | 米 | 该点的 X 坐标 |
| Y | 米 | 该点的 Y 坐标 |
| rsrp | dBm | 该点下行接收的基站 RSRP 值 |
| sinr_dl | dB | 用户处于该点时候的下行接收信号 SINR |
| sinr_ul | dB | 用户处于该点时候的上行接收信号 SINR |
| tput_dl | Mbps | 用户处于该点时候的下行吞吐量 |
| tput_ul | Mbps | 用户处于该点时候的上行吞吐量 |
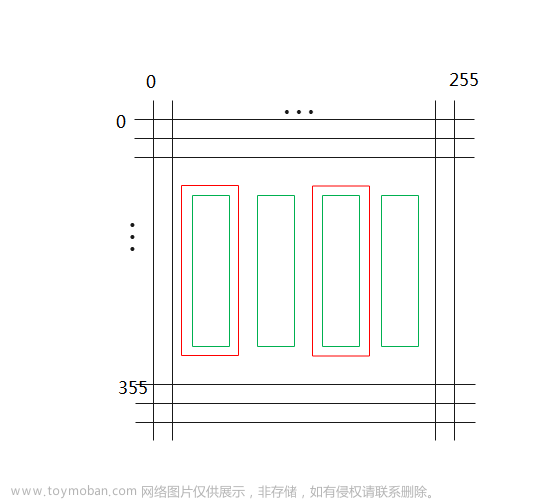
图5 海港建模示意图
以下为海港建模方法:
1. 整个海港建模区域 X:0-255,Y:0-355,网格间隔为 5m,共计 72 * 52 个网格,在网格中心点处测量 RSRP 等指标,每个网格对应数据集中 csv 的一个数值
2. 绿色方框为 4 个堆场的位置,红色线条为两个无人集卡各自的运动轨迹
3. 每个堆场有 51 * 12 个位置可以堆放集装箱
运行环境
本任务运行环境包括 Python 3.7.6、numpy 1.25.5、pandas 1.3.5 和 torch 1.13.1。
代码示例
1. 原始数据读取
以 开放创新平台仿真任务:智慧海港的天线与RIS智能规划/data_lightweight 数据为例:
data_train = pd.read_csv('../data_lightweight/data_train.csv')
for col in data_train.select_dtypes(include=[np.number]):
data_train[col] = data_train[col].round(1)
data_train.columns = columns_pre
# 训练数据性能指标
data_result_train = pd.read_csv('../data_lightweight/data_result_train.csv')
data_result_train.fillna(data_result_train.mean(), inplace=True)
2. 模型训练
定义深度强化学习 DDPG文章来源:https://www.toymoban.com/news/detail-856602.html
# 定义 Agent
class DDPGAgent(object):
def __init__(self, state_dim, action_dim, action_bound):
self.actor = Actor(state_dim, action_dim, action_bound)
self.critic = Critic(state_dim, action_dim)
self.actor_target = Actor(state_dim, action_dim, action_bound)
self.critic_target = Critic(state_dim, action_dim)
self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=LR)
self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=LR)
self.loss_func = nn.MSELoss()
self.memory = np.zeros((MEMORY_CAPACITY, N_STATES*3+1))
self.epsilon = 1.0
self.learn_step_counter = 0
self.memory_counter = 0
self.memory = ReplayBuffer(MEMORY_CAPACITY)
......
# 训练 Agent
ddpg_agent = DDPGAgent(N_STATES, action_space.shape[1], ACTION_BOUND)
3. 调用仿真平台仿真并存储结果
注:一个账号每天仅能调用一次仿真平台文章来源地址https://www.toymoban.com/news/detail-856602.html
para_cell, para_ris = para_ceris.papa_judge_info(parametr_best)
# 调用仿真平台前的数据处理,parametr_best 为调用仿真平台的一套规划和优化参数,格式参考任务定义章节的参数输入介绍,经过该行代码进行数据处理
parametr_best_kpi = rissdk.complete_simulation(para_cell, para_ris)
# 通过 rissdk.complete_simulation 函数调用仿真平台,仿真结束后结果将自动存储到 /root/teamshare/ 下,便于用户提交结果得到评测到了这里,关于新质生产力人工智能+系列4:6G时代AI研究-智慧海港天线与智能超表面(RIS)规划(含任务、数据、代码、仿真资源)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!