项目地址
项目:https://github.com/212534/Unity-Sentis-YOLOv8
Demo apk:链接:https://pan.baidu.com/s/1agTZRhnCzgT5P5HtuUvgWQ?pwd=ydj7
提取码:ydj7
–来自百度网盘超级会员V5的分享
效果展示
这是在电脑上的测试,用的摄像头拍屏幕
安装Sentis
可以把Sentis看作Barracuda的升级版。
在Package里装com.unity.sentis

使用Sentis推理yolov8的onnx
这一部分比较简单,教程非常多
using System.Collections;
using System.Collections.Generic;
using Unity.Sentis;
using UnityEngine;
using Unity.Sentis.Layers;
public class Test: MonoBehaviour
{
public ModelAsset modelAsset;
private Model model;
private IWorker worker;
Ops ops;
void Start()
{
model = ModelLoader.Load(modelAsset);
worker = WorkerFactory.CreateWorker(BackendType.GPUCompute, model);
ops = WorkerFactory.CreateOps(BackendType.GPUCompute, null);
}
public void Predict(WebCamTexture camImage) //我这里使用的是摄像头图像,你也可以用普通图片。
{
using Tensor inputImage = TextureConverter.ToTensor(camImage,width:640,height:640, channels: 3); //对输入的图像做处理
var m_Inputs = new Dictionary<string, Tensor>
{
{"images", inputImage }
};
worker.Execute(m_Inputs);//执行推理
var output0 = worker.PeekOutput("output0") as TensorFloat; //获取输出结果
output0.MakeReadable(); //从GPU中取出数据,经过这一步之后就可以读取output0中的数据了
}
}
直接把onnx文件拖上去就行了。
YOLOv8的输出格式
需要注意的是,yolov8的onnx的输出结果是一个1x84x8400的张量(当类别数不同时会有变化),具体含义可以参考这篇文章https://blog.csdn.net/yangkai6121/article/details/133843368
简单来讲,这里的8400是8400个预测框。而每个预测框包含以下信息:84 = 边界框预测4 + 数据集类别80
本文使用的yolov8是在coco数据集上训练的,包含80个类别,所以这里是4+80,具体情况与你的训练用的数据集类别有关。
1x84x8400这个输出很明显没法直接使用。所以需要加一个nms来后处理
NMS
yolo属于单阶段的目标检测算法,因此还要对预测框进行后处理。常见的做法是在Unity里用C#自己实现nms,但nms本身就是一个性能开销很大的后处理,自己用C#实现在性能上不划算。
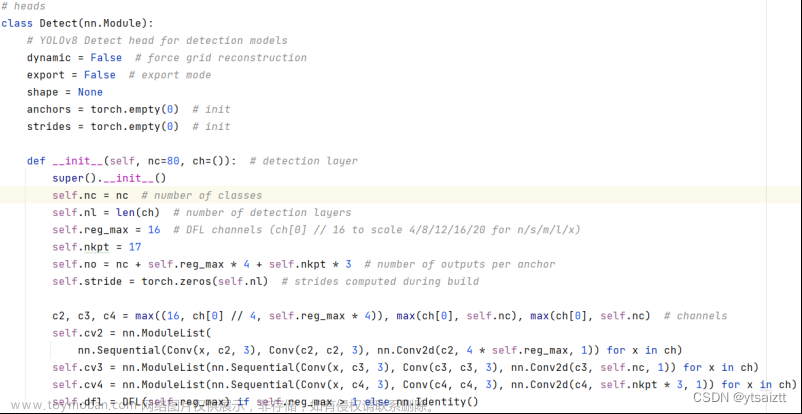
如果是了解目标检测部署的同学,应该知道onnx在opset11及以上版本支持了内置nms层。那么理论上,只要在yolov8的检测头里把torch.ops.torchvision.nms加进去就可以导出自带nms层的ONNX模型。像下图一样
实际上经过测试,Sentis确实可以识别出onnx的内置nms层,但是会报错。
原因可能在于,Sentis内实现的nms层与torch.ops.torchvision.nms在input的shape上存在区别。
举例来讲,在python中对yolov8使用torch.ops.torchvision.nms时,它要求的boxes输入shape为8400x4,scores为8400.
但是Sentis实现的nms层要求的shape分别为,1x8400x4与1x1x8400。
使用Sentis给模型加入NMS层
既然torch.ops.torchvision.nms不能用,那我们可以在Unity里用代码把Sentis实现的nms层加到模型里。
先看一下Sentis中NonMaxSuppression()的输入参数。详细的可以看这里
https://docs.unity3d.com/Packages/com.unity.sentis@1.2/api/Unity.Sentis.Layers.NonMaxSuppression.html
大体来讲与torch.ops.torchvision.nms的输入参数比较一致。
我们需要解决的问题便是把yolov8输出的1x84x8400张量拆解为boxes与scores,也就是NonMaxSuppression()输入。而Sentis是支持在Unity中对模型结构进行修改的。
1.首先我们给模型加入三个新的输入,这也是NonMaxSuppression()所需要的输入。使用新增输入的形式设置这三个值,可以在程序运行时对它们动态修改。
//Set input
model.AddInput("maxOutputBoxesPerClass",DataType.Int, new SymbolicTensorShape(1)); //每个类别最多返回的边框数量。
model.AddInput("iouThreshold",DataType.Float, new SymbolicTensorShape(1)); //iou阈值
model.AddInput("scoreThreshold",DataType.Float, new SymbolicTensorShape(1)); //置信度阈值
2.对1x8400x4进行拆分。比较反人类的是,Sentis在添加层时,有些层的初始化只能输入字符串作为参数,这些字符串实际上是网络里的输出名,输入名,常量名等。所以这里要给模型加入几个常量。
我在注释里加入了每一层的shape变化,方便各位理解这个过程。如果你没搞过深度学习,不理解每一层的含义,可以去官方文档里看具体解释。
https://docs.unity3d.com/Packages/com.unity.sentis@1.2/api/Unity.Sentis.Layers.html
//Set constants
model.AddConstant(new Constant("0", new int[] { 0 }));
model.AddConstant(new Constant("1", new int[] { 1 }));
model.AddConstant(new Constant("4", new int[] { 4 }));
model.AddConstant(new Constant("84", new int[] { 84 })); //这个值根据你自己的类别数进行修改 4 + 类别数
//Add layers
model.AddLayer(new Slice("boxCoords0", "output0", "0", "4", "1")); //1x84x8400 -> 1x4x8400
model.AddLayer(new Transpose("boxCoords", "boxCoords0", new int[] { 0, 2, 1 })); // 1x4x8400 -> 1x8400x4 每个检测框的xywh
model.AddLayer(new Slice("scores0", "output0", "4", "84", "1")); //1x84x8400 -> 1x80x8400
model.AddLayer(new ReduceMax("scores", new[] { "scores0", "1" })); //1x80x8400 -> 1x1x8400 最有可能类别的置信度
model.AddLayer(new ArgMax("classIDs", "scores0", 1)); //1x80x8400 -> 1x1x8400 最有可能类别的index
3.加入NMS层。其中,yolov8输出的边界框信息是xywh的格式,因此设置centerPointBox: CenterPointBox.Center
model.AddLayer(new NonMaxSuppression("nmsOutput", "boxCoords", "scores",
"maxOutputBoxesPerClass", "iouThreshold", "scoreThreshold",
centerPointBox: CenterPointBox.Center
));
4.给网络加入新的输出
model.AddOutput("boxCoords");
model.AddOutput("classIDs");
model.AddOutput("nmsOutput");
最终变成这样:
void Start()
{
model = ModelLoader.Load(modelAsset);
worker = WorkerFactory.CreateWorker(BackendType.GPUCompute, model);
ops = WorkerFactory.CreateOps(BackendType.GPUCompute, null);
//Set input
model.AddInput("maxOutputBoxesPerClass",DataType.Int, new SymbolicTensorShape(1));
model.AddInput("iouThreshold",DataType.Float, new SymbolicTensorShape(1));
model.AddInput("scoreThreshold",DataType.Float, new SymbolicTensorShape(1));
//Set constants
model.AddConstant(new Constant("0", new int[] { 0 }));
model.AddConstant(new Constant("1", new int[] { 1 }));
model.AddConstant(new Constant("4", new int[] { 4 }));
model.AddConstant(new Constant("84", new int[] { 84 }));
//Add layers
model.AddLayer(new Slice("boxCoords0", "output0", "0", "4", "1")); //1x84x8400 -> 1x4x8400
model.AddLayer(new Transpose("boxCoords", "boxCoords0", new int[] { 0, 2, 1 })); // 1x4x8400 -> 1x8400x4
model.AddLayer(new Slice("scores0", "output0", "4", "84", "1")); //1x84x8400 -> 1x80x8400
model.AddLayer(new ReduceMax("scores", new[] { "scores0", "1" })); //1x80x8400 -> 1x1x8400 最有可能类别的置信度
model.AddLayer(new ArgMax("classIDs", "scores0", 1)); //1x80x8400 -> 1x1x8400 最有可能类别的index
model.AddLayer(new NonMaxSuppression("nmsOutput", "boxCoords", "scores",
"maxOutputBoxesPerClass", "iouThreshold", "scoreThreshold",
centerPointBox: CenterPointBox.Center
));
model.AddOutput("boxCoords");
model.AddOutput("classIDs");
model.AddOutput("nmsOutput");
}
使用NMS的输出结果
NonMaxSuppression()的输出是一个Nx3的数据。
N指的是最终保留了几个框,而3则代表[boxID,clsID,boxCoordID] ,有了clsID以及boxCoordID便可以从模型输出的boxCoords以及classIDs中提取出最终预测框的xywh和类别。
1.修改一下网络的输入,因为前文中给网络新加了三个输入,因此这里需要改变输入的数据。
using Tensor inputImage = TextureConverter.ToTensor(camImage,width:640,height:640, channels: 3);
var m_Inputs = new Dictionary<string, Tensor>
{
{"images", inputImage },
{"maxOutputBoxesPerClass", new TensorInt(new TensorShape(1), new int[] { maxOutputBoxesPerClass })},
{"iouThreshold", new TensorFloat(new TensorShape(1), new float[] { iouThreshold })},
{"scoreThreshold",new TensorFloat(new TensorShape(1), new float[] { scoreThreshold })}
};
worker.Execute(m_Inputs);
2.获取网络输出
var boxCoords = worker.PeekOutput("boxCoords") as TensorFloat; //1x8400x4 所有的预测框的xywh
var nmsOutput = worker.PeekOutput("nmsOutput") as TensorInt; //Nx3, N指的是最终保留了几个框. 返回结果为[boxID,clsID,boxCoordID]
var classIDs = worker.PeekOutput("classIDs") as TensorInt; //1x1x8400 每个预测框的类别id
3.处理网络的输出,方便后续使用。
模型的输出结果存在于GPU上,一般来讲,需要先从GPU上取出数据才能用CPU进行处理,这会导致性能的浪费。因此我们可以使用ops调用Sentis的算子,直接在GPU上对网络的结果进行处理,这样可以节省一些性能开销。
if(nmsOutput.shape[0] == 0)//如果NMS之后一个框也未剩下 则终止
{
return;
}
var boxCoordIDs = ops.Slice(nmsOutput, new int[] { 2 }, new int[] { 3 }, new int[] { 1 }, new int[] { 1 }); //Nx3 -> Nx1 取出boxCoordID
var boxCoordIDsFlat = boxCoordIDs.ShallowReshape(new TensorShape(boxCoordIDs.shape.length)) as TensorInt; //Nx1 -> N 展平
var output = ops.Gather(boxCoords, boxCoordIDsFlat, 1) as TensorFloat; //1x8400x4 -> 1xNx4
var labelIDs = ops.Gather(classIDs, boxCoordIDsFlat, 2) as TensorInt; //1x1x8400 -> N
output.MakeReadable(); //将处理好的结果从GPU取出
labelIDs.MakeReadable();
4.经过前面处理过的输出,从GPU里取出来就可以直接使用。一个简单示例如下。
for(int i = 0; i<output.shape[1]; i++)
{
float x=output[0,i,0];
float y=output[0,i,1];
float w=output[0,i,2];
float h=output[0,i,3];
DrawBoundingBoxes(x,y,w,h,labelIDs[i]);//绘制一个Bounding Box
}
最终如下所示:文章来源:https://www.toymoban.com/news/detail-857300.html
public void Predict(WebCamTexture camImage)
{
using Tensor inputImage = TextureConverter.ToTensor(camImage,width:640,height:640, channels: 3);
var m_Inputs = new Dictionary<string, Tensor>
{
{"images", inputImage },
{"maxOutputBoxesPerClass", new TensorInt(new TensorShape(1), new int[] { maxOutputBoxesPerClass })},
{"iouThreshold", new TensorFloat(new TensorShape(1), new float[] { iouThreshold })},
{"scoreThreshold",new TensorFloat(new TensorShape(1), new float[] { scoreThreshold })}
};
worker.Execute(m_Inputs);
var boxCoords = worker.PeekOutput("boxCoords") as TensorFloat; //1x8400x4 所有的预测框的xywh
var nmsOutput = worker.PeekOutput("nmsOutput") as TensorInt; //Nx3, N指的是最终保留了几个框. 返回结果为[boxID,clsID,boxCoordID]
var classIDs = worker.PeekOutput("classIDs") as TensorInt; //1x1x8400 每个预测框的类别id
if(nmsOutput.shape[0] == 0)//如果NMS之后一个框也未剩下 则终止
{
return;
}
var boxCoordIDs = ops.Slice(nmsOutput, new int[] { 2 }, new int[] { 3 }, new int[] { 1 }, new int[] { 1 }); //Nx3 -> Nx1 取出boxCoordID
var boxCoordIDsFlat = boxCoordIDs.ShallowReshape(new TensorShape(boxCoordIDs.shape.length)) as TensorInt; //Nx1 -> N 展平
var output = ops.Gather(boxCoords, boxCoordIDsFlat, 1) as TensorFloat; //1x8400x4 -> 1xNx4
var labelIDs = ops.Gather(classIDs, boxCoordIDsFlat, 2) as TensorInt; //1x1x8400 -> N
output.MakeReadable();
labelIDs.MakeReadable();
for(int i = 0; i<output.shape[1]; i++)
{
float x=output[0,i,0];
float y=output[0,i,1];
float w=output[0,i,2];
float h=output[0,i,3];
DrawBoundingBoxes(x,y,w,h,labelIDs[i]);//绘制一个Bounding Box
}
}
导出到手机
如果你要打包到手机端的话,记得点一下onnx文件,然后点这里。
下面是手机端的运行效果,我手机的CPU是骁龙850,可以发现帧数非常低。主要是我把推理放到了Update()里,所以性能开销很大,因此还有很多优化空间。 文章来源地址https://www.toymoban.com/news/detail-857300.html
文章来源地址https://www.toymoban.com/news/detail-857300.html
到了这里,关于在Unity上使用Sentis部署yolov8与添加NMS,并编译到手机上的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[易语言][]使用易语言部署yolov8的onnx模型](https://imgs.yssmx.com/Uploads/2024/02/489191-1.jpeg)
![[C++]使用纯opencv部署yolov8旋转框目标检测](https://imgs.yssmx.com/Uploads/2024/04/858578-1.jpeg)