目录
存储器
RAM
ROM
存储器简化模型
AT24C02介绍
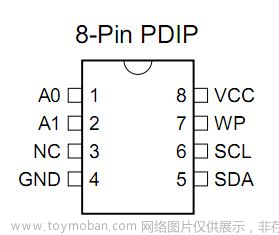
引脚及应用电路
内部结构框图
I2C总线
I2C总线介绍
I2C电路规范
I2C时序结构
起始条件
终止条件
发送一个字节
接受一个字节
发送应答
接收应答
I2C数据帧
AT24C02数据帧
字节写
随机读
代码部分
遇到的问题
代码
硬件
今天我们来介绍一下AT24C02,首先呢,它是一种可以实现掉电不丢失的存储器,可用于保存单片机运行时想要永久保存的数据信息,在介绍AT24C02之前,我们先来介绍一下存储器!
存储器
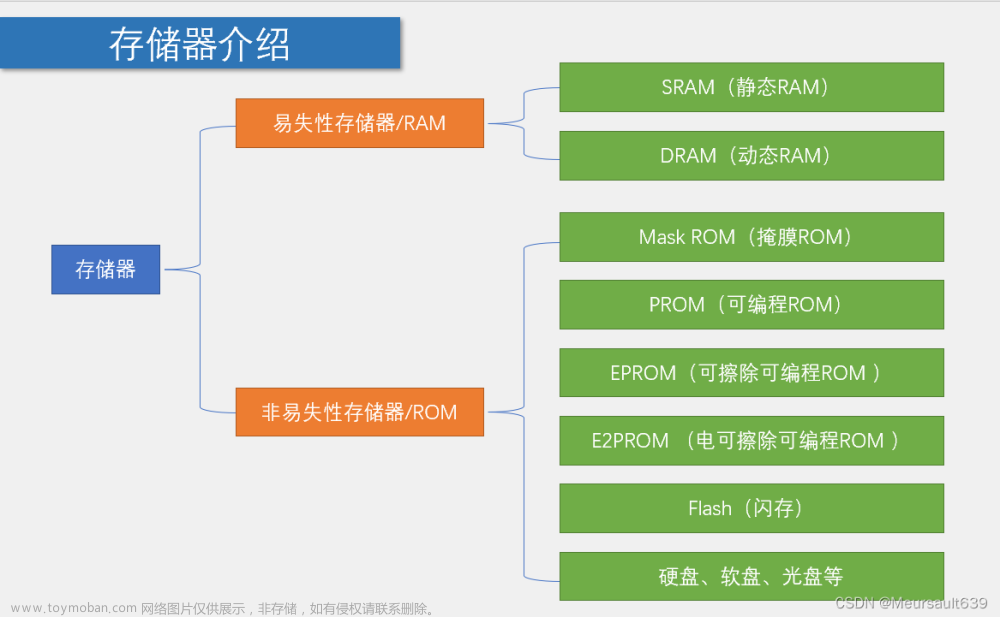
先来简单介绍一下RAM(随机存储器)以及ROM(只读存储器)的优缺点吧!
| 优点 | 缺点 | |
|---|---|---|
| RAM | 储存速度快 | 掉电丢失 |
| ROM | 存储速度慢 | 掉电不丢失 |
RAM
RAM主要分为SRAM(静态RAM)和DRAM(动态RAM),SRAM主要用于电脑CPU以及我们的单片机CPU;而DRAM主要用在电脑内存条以及手机的运行内存,因为电容器会掉电,所以需要不断进行扫描。
| 组成 | 优点 | 缺点 | |
|---|---|---|---|
| SRAM | 触发器 | 存储速度较快 | 容量小,成本较高 |
| DRAM | 电容 | 存储速度较慢 | 容量大,成本较低 |
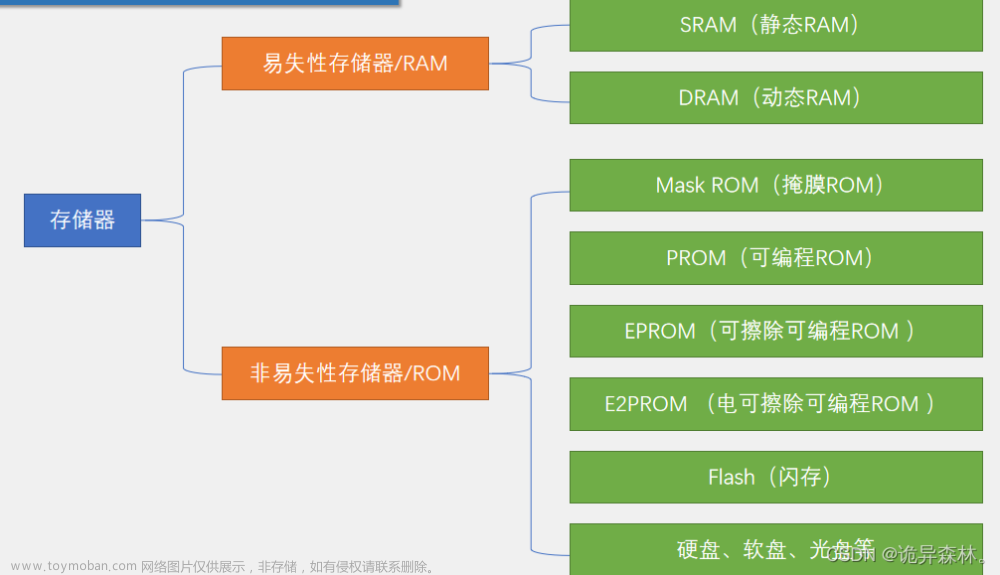
ROM
ROM主要分为Mask ROM(掩膜ROM),PROM(可编程ROM),EPROM(可擦除可编程ROM ),E2PROM (电可擦除可编程ROM ),这四个是一家的,还有Flash(闪存),硬盘、软盘、光盘等,其中Flash目前使用十分广泛,基本上打败了ROM一家。
| 特点 | |
|---|---|
| Mask ROM | 只能读 |
| PROM | 可以写,但只能一次 |
| EPROM | 可以写多次,但要紫外线照射30分钟 |
| E2PROM | 可以写多次,并且只要几毫秒即可 |
| Flash | 与E2PROM类似,但集成度更高 |
| 硬盘、软盘、光盘等 | 软盘和光盘目前见的比较少了 |
存储器简化模型


这个地方涉及到了数电的知识,稍后会出数电寄存器一章的笔记,目前我们只能简单的讲解一下。左边是地址总线,下面是数据总线,首先我们选择地址总线,比如像赋值10000000,相当于打开了第一行,之后选择连接的结点(之前都没有连接上),将其连上,Mask ROM使用的方法是一个二极管(这么做的原因是防止电流经过上面的节点导致数据混乱),而PROM使用了两个二极管(一个二极管和保险丝),但是其中一个二极管(保险丝)比较容易击穿,当给高电压的时候,蓝色电容(保险丝熔断)击穿,实现数据写入。这也是我们“烧录”的由来,然后我们现在的就是属于给电之后会恢复,实现反复写入,具体是怎么样的,我们在稍后的数电笔记中进行详细的介绍。
AT24C02介绍
接下来我们来简单介绍一下AT24C02吧!
- AT24C02是一种可以实现掉电不丢失的存储器,可用于保存单片机运行时想要永久保存的数据信息
- 存储介质:E2PROM
- 通讯接口:I2C总线
- 容量:256字节

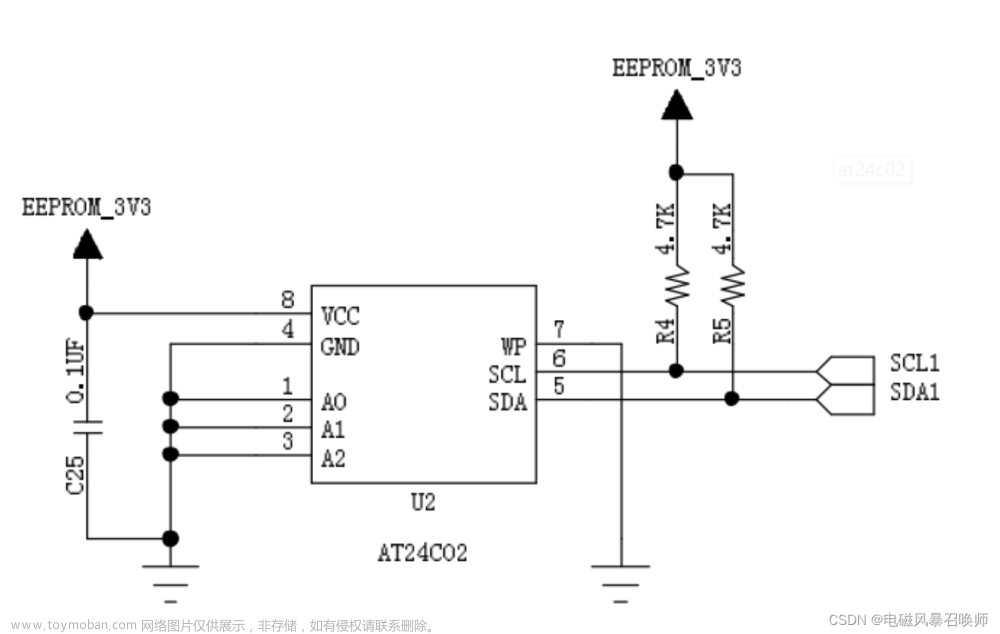
引脚及应用电路

内部结构框图

接下来我们来简单的介绍一下内部结构,我们从每个部分进行讲解!
- 第一个就是我们刚刚介绍的存储器简化模型那样,网状结构
- 第二个是一个译码器,用于输入地址
- 第三个是输入输出端,通过Y DEC将数据输出
- 第四个也是译码器,用来帮助MUX输出数据,然后就直接输出数据
- 第五个是用来擦除数据用的
- 第六个是用来设置地址的,里面有个寄存器是用来存储地址的,每写入和读出寄存器自动加一,读出不指定地址,默认拿出寄存器的地址
- 第七个是开始结束逻辑
- 第八个是一个地址比较器
- 第九个是一个控制串行逻辑
I2C总线
-
I2C总线介绍
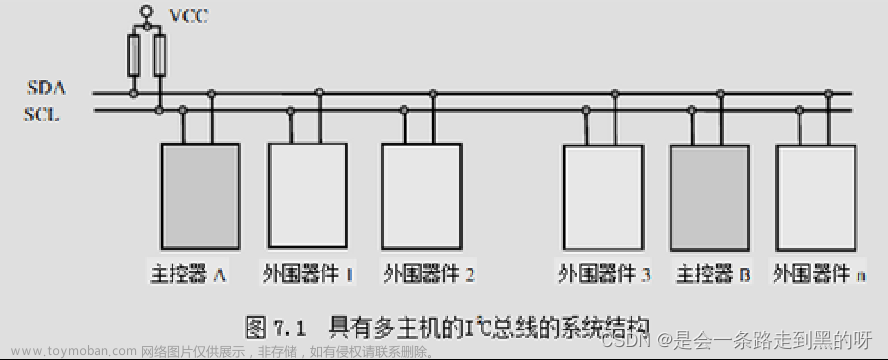
- I2C总线(Inter IC BUS)是由Philips公司开发的一种通用数据总线
- 两根通信线:SCL(Serial Clock)、SDA(Serial Data)
- 同步、半双工,带数据应答
- 通用的I2C总线,可以使各种设备的通信标准统一,对于厂家来说,使用成熟的方案可以缩短芯片设计周期、提高稳定性,对于应用者来说,使用通用的通信协议可以避免学习各种各样的自定义协议,降低了学习和应用的难度
I2C电路规范

其中一个IC的内部结构

我们来抽象一下I2C的通信方式
通信规则:
1、杠子在上方代表1,下方代表0
2、每个人只能拉杆子或者松开手
3、每个人需要地址进行通信

I2C时序结构
接下来我们来介绍一下六个时序结构,只要集齐了这六个时序结构,就可以召唤数据帧了!
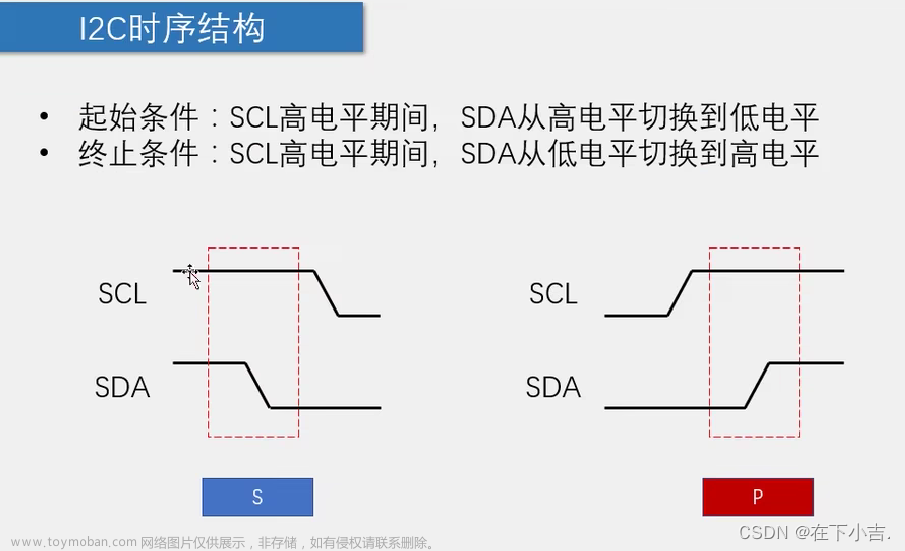
起始条件
起始条件:SCL高电平期间,SDA从高电平切换到低电平(相当于告诉大家我要发送信息了)

终止条件
终止条件:SCL高电平期间,SDA从低电平切换到高电平(相当于告诉大家我要停止了)

发送一个字节
发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位在前),然后拉高SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节

接受一个字节
接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位在前),然后拉高SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)

发送应答
发送应答(SA):在接收完一个字节之后,主机在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答(相当于一个回应)
接收应答
接收应答(RA):在发送完一个字节之后,主机在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)

I2C数据帧
I2C数据帧其实就是上面六个部分拼合在一起,把数据帧拆分开来看,就比较好理解了。
发送一帧数据

相当于老师在讲课,我们给老师回复

相当于老师叫人回答问题

像是一个完整的回答过程,老师提出问题,学生回答
AT24C02数据帧
AT24C02数据帧,其实不止这几个,但我们在这里就简单介绍一下这两种!
字节写
字节写:在WORD ADDRESS处写入数据DATA

随机读
随机读:读出在WORD ADDRESS处的数据DATA


AT24C02的固定地址为1010,可配置地址本开发板上为000,所以SLAVE ADDRESS+W为0xA0,SLAVE ADDRESS+R为0xA1
代码部分
这节内容的代码有一点点面向对象的思想,因为AT24C02的时序帧是根据I2C的六个时序结构拼接而成,所以AT24C02时序帧只需要将他们拼装起来,有点类似与接口和继承的味道,好了,我们先将代码给出!
// I2C.c
#include <REGX52.H>
// 在引脚部分介绍过了,SCL是P21,SDA是P20;
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;
// 单片机比较慢无需delay,这个就是按照时序图来的,按图来就行
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void I2C_Start(void)
{
// 可以理解为初始化,确保一定为高电平
I2C_SDA = 1;
I2C_SCL = 1;
// 按照时序图可得,先SDA为0,再SCL为0
I2C_SDA = 0;
I2C_SCL = 0;
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void I2C_Stop(void)
{
I2C_SDA = 0;
I2C_SCL = 1;
I2C_SDA = 1;
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void I2C_SendByte(unsigned char Byte)
{
unsigned char i;
for(i = 0;i < 8;i++){
I2C_SDA = Byte & (0x80 >> i);
I2C_SCL = 1;
I2C_SCL = 0;
}
}
/**
* @brief I2C接收一个字节
* @param 无
* @retval 接收到的一个字节数据
*/
unsigned char I2C_ReceiveByte(void)
{
unsigned char i,Byte = 0x00;
// 释放SDA
I2C_SDA = 1;
for(i = 0; i < 8; i++)
{
I2C_SCL=1;
if(I2C_SDA){Byte|=(0x80>>i);}
I2C_SCL=0;
}
return Byte;
}
/**
* @brief I2C发送应答
* @param AckBit 应答位,0为应答,1为非应答
* @retval 无
*/
void I2C_SendAck(unsigned char AckBit)
{
I2C_SDA = AckBit;
I2C_SCL = 1;
I2C_SCL = 0;
}
/**
* @brief I2C接收应答位
* @param 无
* @retval 接收到的应答位,0为应答,1为非应答
*/
unsigned char I2C_ReceiveAck(void)
{
unsigned char AckBit;
// 释放SDA
I2C_SDA = 1;
I2C_SCL = 1;
AckBit = I2C_SDA;
I2C_SCL = 0;
return AckBit;
}// AT24C02.c
#include <REGX52.H>
#include "I2C.h"
// SLAVE ADDRESS+W为0xA0,SLAVE ADDRESS+R为0xA1
#define AT24C02_ADDRESS_READ 0xA0
#define AT24C02_ADDRESS_WRITE 0xA1
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址
* @param Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS_READ);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_SendByte(Data);
I2C_ReceiveAck();
I2C_Stop();
}
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval 读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS_READ);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_Start();
// 读地址
I2C_SendByte(AT24C02_ADDRESS_WRITE);
I2C_ReceiveAck();
Data=I2C_ReceiveByte();
I2C_SendAck(1);
I2C_Stop();
return Data;
}接下来我们使用这些代码实现一个数据储存器,代码如下所示:
//main.c
#include <REGX52.H>
#include "LCD1602.h"
#include "Key.h"
#include "Delay.h"
#include "AT24C02.h"
void main(){
unsigned char KeyNum;
unsigned int Num;
LCD_Init();
LCD_ShowNum(1,1,0,5);
while(1){
KeyNum = Key();
if(KeyNum == 1)
{
Num++;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum == 2)
{
Num--;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum == 3)
{
AT24C02_WriteByte(0,Num%256);// 取低八位
Delay(5);// 因为读周期为5毫秒,如果不延时,将读不出结果
AT24C02_WriteByte(1,Num/256);// 取高八位
Delay(5);
LCD_ShowString(2,1,"Write OK");
Delay(1000);
LCD_ShowString(2,1," ");
}
if(KeyNum == 4)
{
Num = AT24C02_ReadByte(0);// 读低八位
Num |= AT24C02_ReadByte(1) << 8;// 读高八位
LCD_ShowNum(1,1,Num,5);
LCD_ShowString(2,1,"Read OK");
Delay(1000);
LCD_ShowString(2,1," ");
}
}
}运行效果如下所示:
AT24C02存储
接下来,我们将会改进之前动态数码管的实现,使用定时器来扫描,然后实现一个具有记忆功能的秒表。
思路
我们使用定时器来扫描按键以及数码管,所以按键以及数码管都需要用到定时器的功能,具体内容如下所示:

但我们只有一个中断函数,这样很容易出错,而且不能达到目的,并且代码耦合性过高,所以我们采用另一种方式,如下所示。就是将定时函数放到主函数里面去,再每隔一段时间调用各个部分的函数以达到目的,好了,接下来我们看看代码是如何实现的吧!

//Nixie.c
#include <REGX52.H>
#include "Delay.h"
// 存放数码管显示缓存区
unsigned char Nixie_Buf[9] = {0, 10, 10, 10, 10, 10, 10, 10, 10};
/**
* @brief 设置显示缓存区
* @param Location 要设置的位置,范围:1~8
* @param Number 要设置的数字,范围:段码表索引范围
* @retval 无
*/
void Nixie_SetBuf(unsigned char Location, unsigned char Number)
{
Nixie_Buf[Location] = Number;
}
/**
* @brief 数码管扫描显示
* @param Location 要显示的位置,范围:1~8
* @param Number 要显示的数字,范围:段码表索引范围
* @retval 无
*/
void Nixie_Scan(unsigned char Location, unsigned char Number)
{
unsigned char NixieTable[] = {0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, 0x6F, 0x00,0x40};
P0 = 0x00;//段码清0,消影
switch(Location)//位码输出
{
case 1:P2_4=1;P2_3=1;P2_2=1;break;
case 2:P2_4=1;P2_3=1;P2_2=0;break;
case 3:P2_4=1;P2_3=0;P2_2=1;break;
case 4:P2_4=1;P2_3=0;P2_2=0;break;
case 5:P2_4=0;P2_3=1;P2_2=1;break;
case 6:P2_4=0;P2_3=1;P2_2=0;break;
case 7:P2_4=0;P2_3=0;P2_2=1;break;
case 8:P2_4=0;P2_3=0;P2_2=0;break;
}
P0 = NixieTable[Number];//段码输出
}
// 数码管扫描
void Nixie_Loop(void)
{
static unsigned char i = 1;
Nixie_Scan(i,Nixie_Buf[i]);
i++;
if(i>=9){i = 1;}
}//Key.c
#include <REGX52.H>
#include "Delay.h"
unsigned char Key_KeyNumber;
/**
* @brief 获取独立按键键码
* @param 无
* @retval 按下按键的键码,范围:0~4,无按键按下时返回值为0
*/
unsigned char Key_GetState()
{
unsigned char KeyNumber=0;
if(P3_1==0){KeyNumber=1;}
if(P3_0==0){KeyNumber=2;}
if(P3_2==0){KeyNumber=3;}
if(P3_3==0){KeyNumber=4;}
return KeyNumber;
}
// 循环调用函数,用来判断哪个键被按下
void Key_Loop(void)
{
static unsigned char NowState, LastState;
LastState = NowState;
NowState = Key_GetState();
// 上一次按键1被按下,然后按键松开,完成一次按键识别
if(LastState == 1 && NowState == 0)
{
Key_KeyNumber = 1;
}
if(LastState == 2 && NowState == 0)
{
Key_KeyNumber = 2;
}
if(LastState == 3 && NowState == 0)
{
Key_KeyNumber = 3;
}
if(LastState == 4 && NowState == 0)
{
Key_KeyNumber = 4;
}
}
unsigned char Key(void){
unsigned char Temp = 0;
Temp = Key_KeyNumber;
// 将Key_KeyNumber置0,因为Key_KeyNumber不会刷新
Key_KeyNumber = 0;
return Temp;
}//main.c
#include <REGX52.H>
#include "Time0.h"
#include "Key.h"
#include "Nixie.h"
#include "Delay.h"
#include "AT24C02.h"
unsigned char KeyNum,Min, Sec, MiniSec,RunFlag;
void main(){
Timer0_Init();
while(1){
KeyNum = Key();
if(KeyNum == 1)//K1按键按下
{
RunFlag =!RunFlag;//启动标志位翻转
}
if(KeyNum == 2)//K2按键按下
{
//分秒清0
Min = 0;
Sec = 0;
MiniSec = 0;
}
if(KeyNum == 3)//K3按键按下
{
//将分秒写入AT24C02
AT24C02_WriteByte(0,Min);
Delay(5);
AT24C02_WriteByte(1,Sec);
Delay(5);
AT24C02_WriteByte(2,MiniSec);
Delay(5);
}
if(KeyNum == 4)//K4按键按下
{
//读出AT24C02数据
Min = AT24C02_ReadByte(0);
Sec = AT24C02_ReadByte(1);
MiniSec = AT24C02_ReadByte(2);
}
//设置显示缓存,显示数据
Nixie_SetBuf(1,Min/10);
Nixie_SetBuf(2,Min%10);
Nixie_SetBuf(3,11);
Nixie_SetBuf(4,Sec/10);
Nixie_SetBuf(5,Sec%10);
Nixie_SetBuf(6,11);
Nixie_SetBuf(7,MiniSec/10);
Nixie_SetBuf(8,MiniSec%10);
}
}
void Sec_Loop(void)
{
if(RunFlag){
MiniSec++;
if(MiniSec >= 100)
{
MiniSec = 0;
Sec++;
if(Sec>=60)
{
Sec = 0;
Min++;
if(Min>=60)
{
Min = 0;
}
}
}
}
}
// 定时函数里面的函数千万不能有延时,因为每一毫秒都要进来一次,会卡住
void Timer0_Routine() interrupt 1
{
static unsigned int T0Count,T0Count1,T0Count2;
TL0 = 0x66; //设置定时初始值
TH0 = 0xFC;
// 20ms一次按键扫描
T0Count++;
if(T0Count >= 20){
T0Count = 0;
Key_Loop();
}
// 2ms一次数码管扫描
T0Count1++;
if(T0Count1 >= 2){
T0Count1 = 0;
Nixie_Loop();
}
//10ms调用一次数秒表驱动函数
T0Count2++;
if(T0Count2 >= 10){
T0Count2 = 0;
Sec_Loop();
}
}运行结果如下所示:
秒表
好了,我们关于AT24C02的知识点就先介绍到这里,接下来还会继续分享关于51单片机的知识!
遇到的问题
代码
编写程序的整个过程中,不小心在中途把Keil的一些启动文件给删了,然后花了一小时重新下载;而且因为这次涉及的模块比较多,而且采用了定时器扫描的思路,导致编写代码过程比较艰难,但不断调试和细心纠错,还是能慢慢找到问题的。 文章来源:https://www.toymoban.com/news/detail-857823.html
硬件
第一次使用单片机的时候就烧坏过CPU,然后点阵屏也出过问题,然后这次编写代码过程中LCD1602以及数码管也出了问题,一直没有办法,都准备换一个单片机了,最后移动了一下CPU,就恢复了,硬件出问题,真的太痛苦了。 文章来源地址https://www.toymoban.com/news/detail-857823.html
到了这里,关于(十一)51单片机——用AT24C02实现存储秒表数据(附成果展示)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!