主要展示开源的README
开源仓库KDRobot_RM2023Sentry_Navigation
SLAM以及路径规划部分
河北科技大学机器人战队Actor&Thinker RM2023哨兵导航部分代码
本项目基于ros-noetic
-
学习时间很短加之本人水平有限,请各位大佬发现问题不吝赐教
-
有批评问题欢迎各位佬联系QQ:2782760102
-
user_package软件包下的package.xml,为了不让各位使用它报错,建议删除他或者是删除整个user_package,他对整个开源项目是没有帮助的
-
README部分会随着作者不断深入学习一直更新的QAQ
本文主要描述了本赛季六个来月学习的一些小理解,主要讲一些常用topic
首先学习哨兵底盘算法之前建议了解一下无人驾驶系统的架构
零、写在前面
本项目更多的提供一个很多开源的整合框架。其中包含了大量作者在学习阶段乱写的注释笔记等。建议直接去各个仓库自己克隆拼凑
- fast_lio 注意它包含了子模块
- autonomous_exploration_development_environment
- far_planner
- livox_ros_driver 注意安装SDK
- livox_ros_driver2 注意安装SDK
- tear_planner 此处用不上,他是和far_planner算法处在同一层,两个应用场景,一个是探索未知环境,一个是做路径规划
一、算法的架构组成

首先拿出无人驾驶系统架构
需要重点强调一下的就是规划层的任务规划和运动规划。其中任务规划属于是一个大范围低分辨率的路径规划,它能够规划从车体到goal-point的整体路径,他的主要作用是纵观全局的去做规划,当无人车走到死角的时候能够及时的重新规划一条路径,并将整体路径分成小部分距离无人车近的路径,发布话题给运动规划。运动规划属于是一个小范围高分辨率的路径规划,他的主要作用是小范围的导航,但是他包含了避障等功能
- 规划层的部分非常建议搭配论文食用,论文是同名的,我翻译了一下,看不惯英文的各位佬移步我的另一个仓库
- PS:仓库里也有论文原文的跳转。这是一个类似文档的论文,没有复杂的理论以及数学公式,小白也能看懂
1.感知层
- 感知层使用的算法是fast-lio2
2.规划层
- 任务规划使用的算法是far_planner
- 运动规划使用的算法是autonomous_exploration_development_environment
- 注意:运动规划算法实车部署的时候,起作用的是里面的内置算法ground_based_autonomy_basic,autonomous_exploration_development_environment实际上是一个仿真平台。用起来更方便
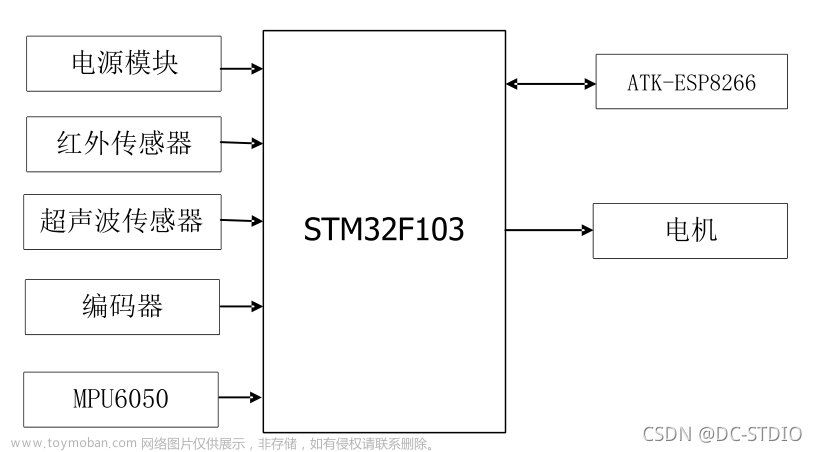
3.控制层
- 发送x y yaw指令到单片机执行。
二、算法中的部分pkg的作用
感知层
感知层只用了fastlio,地图话题为/cloud_registered,里程计话题为/Odometry
规划层
任务规划
任务规划为far_planner,只部署的话,far_planner.cpp中有一个话题/goal_point为目标点,拥有目标点之后,他会计算整体路径并且拆分整体路径发送航路点到行为规划。
如果行为规划和运动规划所运用的都是cmu官方的开源代码,则不需要修改话题。否则需要修改far_planner.launch中的话题
行为规划
行为规划一般是自己写的决策
运动规划
local_planner
pathFollower
运动规划放在一起说
在开源代码autonomous_exploration_development_environment中,有以下pkg
-
joystick_drivers
-
loam_interface
-
local_planner
-
sensor_scan_generation
-
terrain_analysis
-
terrain_analysis_ext
-
vehicle_simulator
-
velodyne_simulator
-
visualization_tools
-
waypoint_example
-
waypoint_rviz_plugin
其中,
1为ros的手柄pkg,用于订阅手柄的消息,手柄可控制小车移动,用作调试用。比如1. 避障效果:前方有障碍物的时候,及时手柄操控一直向前,也是可以自动避障的。2. 底层嵌入式的坐标系方向与ros坐标系方向是否一致:检查运动方向是否一致,往左推向右走就是有问题。3. 底层嵌入式相对于pc的反应速度:反应速度太慢会导致使用时车身抖动。
2为slam接口pkg直接修改loam_interface的launch文件,可以修改点云图和里程计的话题以及是否需要坐标变换,并且cmu官方给出了部分常用slam开源代码与规划层代码对接的实例
3.为运动规划的主要代码,其中,local_planner作为局部路径规划器,通过MATLAB生成了小车的所有可行驶路径:在rviz中可视为车身(雷达)坐标系周围的一圈或者一部分圆弧的黄色路径,路径和matlab源码存储在该pkg下的paths目录中,可通过更改变量scale来改变实际车体的半径(不是很确定)。local_planner中订阅了一个名为/way_point的话题,此话题为航路点,也就是小车局部规划的目标点。他的来源为上层规划算法far_planner发送,自己发送,或者使用rviz+官方的way_point插件,它适用于短距离的避障等行为,far_planner的goal_point更适用于远距离的整体规划。然后通过航路点,地形分析等各种条件local会计算出最优路径通过发布话题/path的行为将最优路径发送到path_follower上,path_follower会使用类似pid控制算法的形式计算出跟随该路径需要的x y yaw的速度,并且通过话题/cmd_vel发布,想要根据雷达,路径规划控制小车移动,可以订阅该消息。
4为传感器等消息的坐标变换
5为地面可通过点云分析,该开源算法,适用于地面四轮机器人,所以在雷达点云中,会有一部分点云是地面,有一部分是障碍物,并且一般情况下地面和障碍物还是相接的,该pkg可以通过几何方式去分析点云是地面还是障碍物还是坡,用于上层规划器(far_planner)和行为规划和运动规划的计算。
6为拓展地面可通过点云分析,和5效果一样,但是6属于是大范围低分辨率,5属于小范围高分辨率,6更多的用于上层规划器的全局的规划,似乎行为规划和运动规划并没有用上。该开源代码就是让大范围低分辨率和小范围高分辨率结合,提高了任务规划的效率,加强了行为规划的稳定性
7为该开源算法的仿真平台的仿真相关的东西,他包含了仿真所需的机器人模型,地图的.ply,地图的.world,在mesh目录下运行download_environment.sh以下载仿真所需环境。他提供了代码去实时的更新gazebo中的模型位置,通过仿真获取雷达点云图,计算里程计等。另外部署真实机器人时,也需要用到该pkg下的launch启动文件system_real_robot.launch
8,9,10,11等均为仿真所用的pkg,能用就行
三、关于调参
调参建议先去autonomous_exploration_development_environmentCV一份原始参数
感知层
如果是室内使用fast_lio,可以参考一下https://github.com/hku-mars/FAST_LIO/issues/169
规划层
规划层调参时主要集中在local_planner的launch文件和terrain_analysis的launch文件中
在local_planner.launch中(不一定对)
- sensorOffsetX、sensorOffsetY:为传感器在X、Y轴上相对于车体中心点的偏移
- twoWayDrive:双向驱动:就是车体能不能反向走(倒车)
- maxSpeed:X、Y轴的最大速度
- autonomyMode:自主模式:跟手柄有关
- vehicleLength:车长
- vehicleWidth:车宽
- obstacleHeightThre:障碍物阈值,高于这个值就会被认定成障碍物,否则坡度合适的情况下会认定为斜坡
- groundHeightThre:地面高度阈值,设置太小会导致原地旋转
- minRelZ、maxRelZ:需要调参,但是并不是很清楚具体意义,应该是点云处理的范围
- maxYawRate:最大角速度(单位:°)
在terrain_analysis.launch中
- vehicleHeight:雷达安装高度
四、关于一些话题
- /stop:在pathFollower.cpp中有以下源码
void stopHandler(const std_msgs::Int8::ConstPtr& stop)
{
safetyStop = stop->data;
}
ros::Subscriber subStop = nh.subscribe<std_msgs::Int8> ("/stop", 5, stopHandler);
if (safetyStop >= 1) vehicleSpeed = 0;
if (safetyStop >= 2) vehicleYawRate = 0;
由此可知,当设置stop >= 2时,就可以让车停止(X Y Yaw期望速度都为0)
- /speed:在pathFollower.cpp中有以下源码
void speedHandler(const std_msgs::Float32::ConstPtr& speed)
{
double speedTime = ros::Time::now().toSec();
if (autonomyMode && speedTime - joyTime > joyToSpeedDelay && joySpeedRaw == 0) {
joySpeed = speed->data / maxSpeed;
if (joySpeed < 0) joySpeed = 0;
else if (joySpeed > 1.0) joySpeed = 1.0;
}
}
ros::Subscriber subSpeed = nh.subscribe<std_msgs::Float32> ("/speed", 5, speedHandler);
此话题用于设置移动速度,但是不会超过在launch文件中的maxspeed,超过则等于maxspeed,可以用于某些情况下加速行驶。
- /cmd_vel:控制话题,包含了X Y Yaw三轴期望速度,订阅后直接做用于底盘期望速度
- /way_point & /goal_point:/way_point用于local_planner的航路点(目标点),localplanner中的目标点其实还有方向,所以不是很建议用这个目标点,应该用/goal_point,但是有一点可圈可点的是:/way_point航路点寻迹的时候如果路径被阻塞,不会全局改变路径。这个可以简单利用一下
五、整体运行流程
首先使用pkg livox_ros_driver2驱动MID360发布点云数据(“/livox/lidar”)和imu数据(“/livox/imu”),这些数据由感知层(fast_lio)订阅并处理。
然后经过fast_lio处理后,fast_lio会发布两个话题,分别是环境感知(点云地图"/cloud_registered")和高精定位(里程计"/Odometry"),这两个话题会被loam_interface订阅并进行旋转变换(也可能不变,看具体用哪个算法)和话题名称,坐标系名称变换,用于整个规划层。文章来源:https://www.toymoban.com/news/detail-859302.html
然后terrain_analysis 和 terrain_analysis_ext进行地面点云分析,分析出来可通行的路面,分别作用于后续的上层规划和下层规划。上层规划far_planner利用他们和goal_point计算出整体路径中的分开的航路点作用于local_planner。下层规划利用他和way_point以及已经生成好的路径计算出可行驶路径中最优的一条,发布话题。由pathfollower订阅,进行路径循迹文章来源地址https://www.toymoban.com/news/detail-859302.html
到了这里,关于无人驾驶系统设计--RoboMaster哨兵机器人的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!