一、雅可比矩阵介绍
雅可比矩阵:机器人操作空间速度与关节空间速度的线性映射关系,可以视作从关节空间向操作空间运动速度的传动比。
令机械手的运动方程为: 表示操作空间与关节空间的位移关系
则两边同时对时间求导,就可以求解出q与x之间的微分关系 ,其中J(q)是6*n的偏导数矩阵。表示机械手的雅可比矩阵。
,其中J(q)是6*n的偏导数矩阵。表示机械手的雅可比矩阵。
由于刚体坐标系的广义速度由线速度和角速度组成,即 。则其中J(q)的上三行表示对夹手线速度的传递比,下三行表示对夹手角速度的传递比。而每一列表示对相应的关节速度对于夹手线速度和角速度的传递比,具体如下:
。则其中J(q)的上三行表示对夹手线速度的传递比,下三行表示对夹手角速度的传递比。而每一列表示对相应的关节速度对于夹手线速度和角速度的传递比,具体如下:

则,相应的夹手线速度和角速度可以表示为各关节速度的线性函数如下:

二、矢量积法计算雅可比矩阵
根据关节速度的传递情况,末端夹手的线速度和角速度与某一关节速度存在一定的关系,具体传递情况分析如下:
1.对于移动关节,关节变量只引起末端夹手线速度的变化,其映射关系为:

其中,Xi表示关节变量qi对应的移动轴。
2.对于转动关节,关节变量步进引起末端线速度变化还引起了角速度变化,其映射关系为:

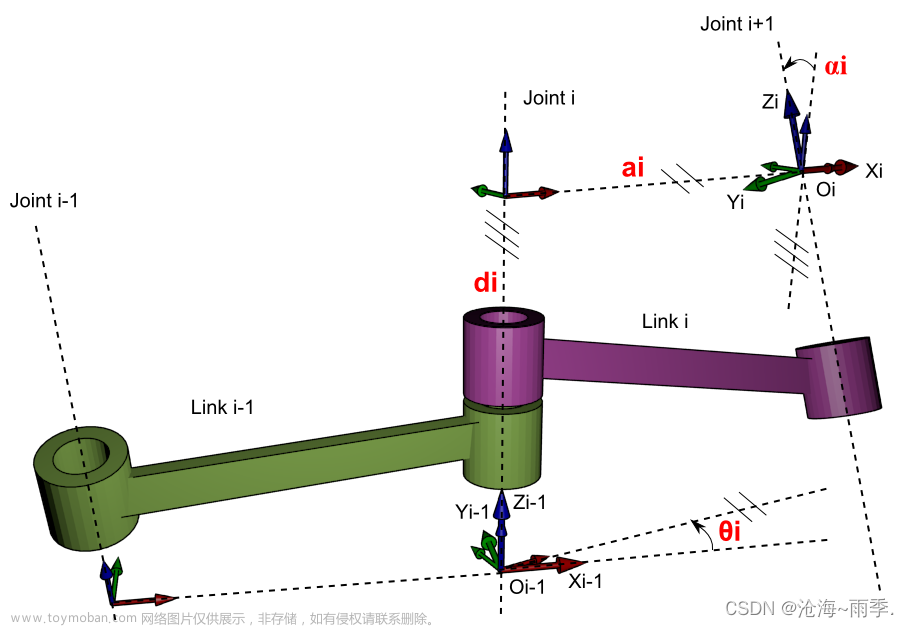
其中, 表示关节变量qi对应的转动轴在基系下的表达。
表示关节变量qi对应的转动轴在基系下的表达。 表示夹手坐标原点相对于坐标系{i-1}的位置矢量在基座标系中的表达。
表示夹手坐标原点相对于坐标系{i-1}的位置矢量在基座标系中的表达。
则相应的雅可比矩阵的第i列可以表示为:

通过上述关系即可以获得相应的雅可比矩阵。文章来源:https://www.toymoban.com/news/detail-859916.html
本文参考《机器人学》第三版 蔡自兴、谢斌编著。文章来源地址https://www.toymoban.com/news/detail-859916.html
到了这里,关于机器人逆运动学求解——矢量积法计算雅可比矩阵的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!