中国内部控制研究中心官网
-
光伏发电系统的MPPT控制策略研究
面对全球日趋严重的能源危机问题,可再生能源的开发和利用得到了人们的高度重 视。其中辐射到地球太阳能资源是十分富饶的,绿色清洁的太阳能不会危害我们的生存 环境,因而受到了人们的广泛利用。光伏发电作为当前利用太阳能的主要方式之一,得 到了不断的应用与
-
论文阅读(一)城市干道分段绿波协调控制模型研究
[1]酆磊,赵欣,李林等.城市干道分段绿波协调控制模型研究[J].武汉理工大学学报(交通科学与工程版),2021,45(06):1034-1038. 主要内容: 该文介绍了基于绿波带宽和关联度的城市干道分段绿波协调控制模型。通过将主干道划分为不同子区域,并根据路段特点进行精准化控制,实现了分
-

汽车自适应巡航系统车距控制策略研究
1 引言 自适应巡航控制( Adaptive Cruise Control,ACC) 是汽车驾驶辅助系统的重要组成部分,其作用是根据车距传感器探测到本车( ACC 车辆) 与主目标车辆( 前车) 之间的相对位置和相对速度信息,自动调节ACC 车辆的节气门开度或部分制动力矩( 即ACC 车辆的加速度) ,实时控制本车与
-
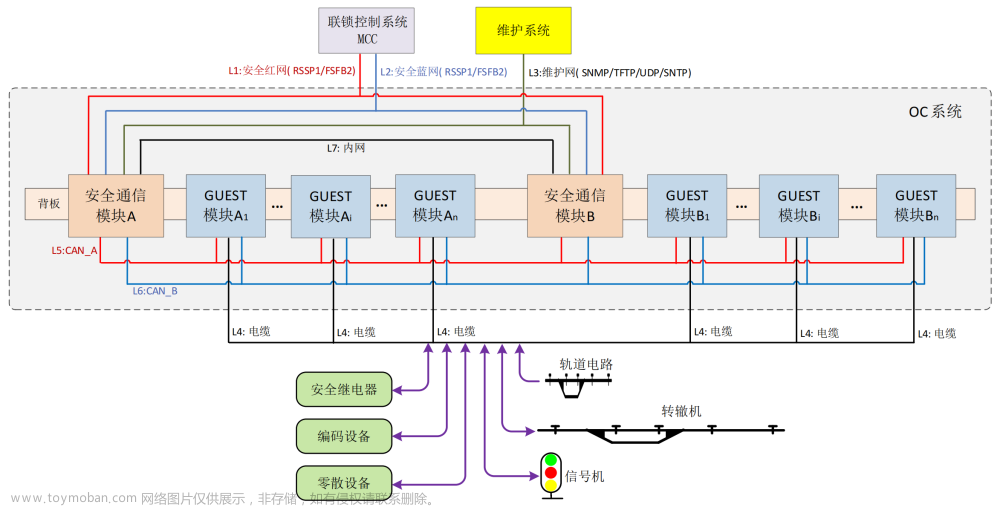
目标控制器数字孪生系统的研究与设计
文章来源: 铁路计算机应用,2023,32(10):36-41. 作者: 许婧,杨硕,季志均 摘要: 随着目标控制器(OC,Object Controller)系统在轨道交通领域的推广应用,其硬件投入较高、研发周期较长、环境搭建较为复杂的问题逐渐显现。文章根据OC系统的架构和特点,基于模块化设计,研
-

如何通过群晖Docker搭建HomeAssistant打造智能家居控制中心
HomeAssistant 是一个可以控制 苹果 、 小米 、MQTT等设备的智能家居平台。本文首先介绍如何使用 群晖NAS 的 Docker 套件来安装 HomeAssistant平台 ,安装成功后,如何结合cpolar内网穿透工具实现 公网访问。 基本条件: 有正版群晖或黑群辉,可以装docker。 打开群晖 容器 管理 套件(
-
基于单片机的智能交通控制系统研究
摘 要:随着汽车保有量不断增加,对交通提出新的要求和挑战,针对愈发拥挤的交通、有限的资源和环境的压力,需积极消 除依附原有滞后方法满足交通需求,选用合理、高效的交通控制手段,优化和改善交通控制运行现状,是当下控制的重点内 容。结合交通实际需求,以
-
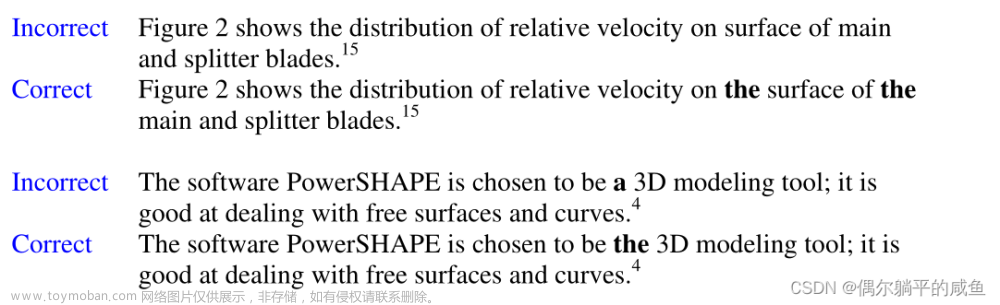
中国工科研究生200多篇英文论文中最常见的习惯(The Most Common Habits from more than 200 English Papers written by Gradua)
原文地址:http://staff.ustc.edu.cn/~jpq/writing/The%20Most%20Common%20Habits.pdf 本文介绍了中国作家在200多篇英语科技论文中观察到的一些最常见的汉英习惯。这些习惯会被解释,在大多数情况下,来自实际论文的示例文本会与首选文本一起给出。试图解释如何纠正和防止此类错误。在某
-
外星人控制中心(AWCC)出现错误日志导致电脑卡顿的解决建议
我的设备是一台19年的戴尔G3 3590,在更新了最新的AWCC之后电脑出现随机卡顿,于是开始尝试解决问题,最后在戴尔支持技术人员的帮助下解决了卡顿问题,AWCC正常工作,G模式也能正常开启。以下是一些解决建议。 按照戴尔支持技术人员的说法,戴尔针对新版本的AWCC导致电
-
容错控制系统故障诊断及重构技术研究的开题报告
一、研究背景 随着现代工业的高度自动化和信息化,工业控制系统在生产过程中扮演着越来越重 要的角色。但是,由于控制系统本身的复杂性和工作环境的恶劣性,控制系统故障 频繁发生,给生产带来了严重的影响。因此,如何在控制系统故障发生时及时准确 地诊断和重构
-
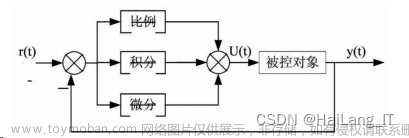
毕业设计-基于 PID 控制算法仿真算法研究- Matlab
目录 前言 课题背景和意义 实现技术思路 一、 基本原理 二、无超调 PID 控制器的设计 三、无超调 PID 设计的验证 代码 实现效果图样例 最后 📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。
-

综述:运动想象脑机接口控制机器人的研究
BCI是一种特殊的信息交换系统,它使大脑能够直接与外部环境互动,而不依赖于大脑的外周神经系统和人体的运动系统。随着BCI的快速发展,对于思维正常但患有神经系统疾病或严重残疾的患者,BCI可使他们重新获得锻炼或与环境沟通的能力,提高生活质量。对于健康人群来
-
【win11】Windows安全中心黄色叹号,应用与浏览器控制不存在/闪退
我在win11 21h2环境下进行了系统重置。重置后,系统托盘的Windows安全中心(Windows Defender)出现黄色叹号,提示需要进行操作,但点进去后并没有看到有黄标提示的控制选项,并且找不到”应用和浏览器控制“这个大选项。同时,设备安全性中的选项也提示不可用。 在系统设置
-
图像识别在自动驾驶汽车中的决策规划与控制策略研究。
图像识别在自动驾驶汽车中的决策规划与控制策略研究 随着自动驾驶技术的不断发展,图像识别已经成为实现自动驾驶的关键技术之一。在自动驾驶汽车中,图像识别技术主要用于环境感知、决策规划和控制系统。本文将重点探讨图像识别在自动驾驶汽车中的决策规划与控制
-
机器人控制系统学习和研究中数学的重要性
其实具备科学思维的方式非常非常难,很多情况下脑海中并非客观事实,而是充满了幻觉。 如果在各种AI工具中问及这样的问题,会得到类似如下回复: 机器人控制系统学习和研究中数学的重要性主要体现在以下几个方面: 机器人运动学:机器人控制系统需要处理机器
-
Dell Alienware Command Center(戴尔/外星人控制中心AWCC)禁止自动更新
1、右击开始,选择 Windows powershell(管理员) 打开,复制下面命令按回车执行 netsh advfirewall firewall add rule name=\\\"awcc1\\\" dir=out program=\\\"C:Program FilesWindowsAppsDellInc.AlienwareCommandCenter_ 5.4.35.0 _x64 __htrsf667h5kn2AWCC.exe\\\" action=block 注意:版本号要按照自己当前版本的来写,例如上面命令中我
-

群晖Docker搭建HomeAssistant,结合内网穿透实现远程访问智能家居控制中心
HomeAssistant 是一个可以控制 苹果 、 小米 、MQTT等设备的智能家居平台。本文首先介绍如何使用 群晖NAS 的 Docker 套件来安装 HomeAssistant平台 ,安装成功后,如何结合cpolar内网穿透工具实现 公网访问。 基本条件: 有正版群晖或黑群辉,可以装docker。 打开群晖 容器 管理 套件(
-

ROS小车研究笔记1/31/2023 小车硬件结构及键盘移动控制节点
1 小车硬件结构 1 中控设备 上方的单片机用于控制电机运动,搭载wifi模块和电量显示屏。下方为树莓派,安装了ROS系统和Ubuntu系统,用于整个小车控制。显示屏和树莓派相连 2 传感器系统 激光雷达及转换器。激光雷达和转换器相连,再由转换器连接树莓派以控制激光雷达 摄
-
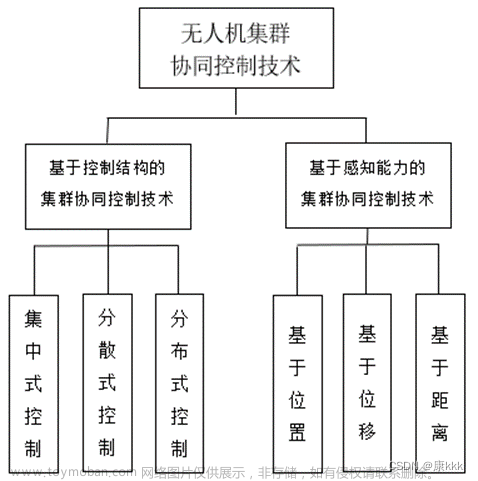
基于一致性的多无人机协同编队控制——(1)研究现状
随着现代化社会的快速发展,智能体编队在军事、航空领域都呈现出了巨大的应用发展前景,多智能体编队也逐渐成为了自动控制领域的研发热门。无人机编队控制是多智能体系统自主协同控制的重要部分,无人机编队从初始位置出发,采用一定的控制算法,通过
-
增强型PID-自适应-前馈-神经网络控制研究(Matlab代码实现)
💥💥💞💞 欢迎来到本博客 ❤️❤️💥💥 🏆博主优势: 🌞🌞🌞 博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️ 座右铭: 行百里者,半于九十。 📋📋📋 本文目录如下: 🎁🎁🎁 目录 💥1 概述 📚2 运行结果 2.1 RBFNN_Optimized_hideen_node_20 2.2 RBFNN_Lat
-
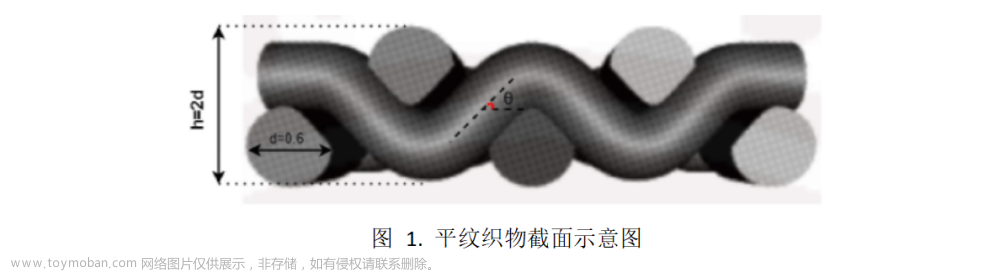
2023华数杯数学建模A题思路 - 隔热材料的结构优化控制研究
# 1 赛题 A 题 隔热材料的结构优化控制研究 新型隔热材料 A 具有优良的隔热特性,在航天、军工、石化、建筑、交通等 高科技领域中有着广泛的应用。 目前,由单根隔热材料 A 纤维编织成的织物,其热导率可以直接测出;但是 单根隔热材料 A 纤维的热导率 (本题实验环境下