linux移植到arm的论文
-
【周口师范学院毕业论文】基于ARM平台的智能网关设计_基于arm的工业物联网网关的论文
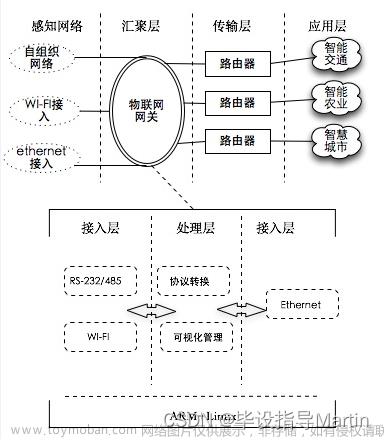
●广泛的接入能力,即解决感知层网络接入以及多种终端设备连接的问题。 ●异构网络互通的能力,即能完成数据协议转换的问题。 ●图形化界面管理能力,即解决智能人机交互的问题[8]。 2.2.1广泛的接入能力 物联网网关需要对感知层网络以及多种终端设备的接入提供接口
-

Linux 内核移植
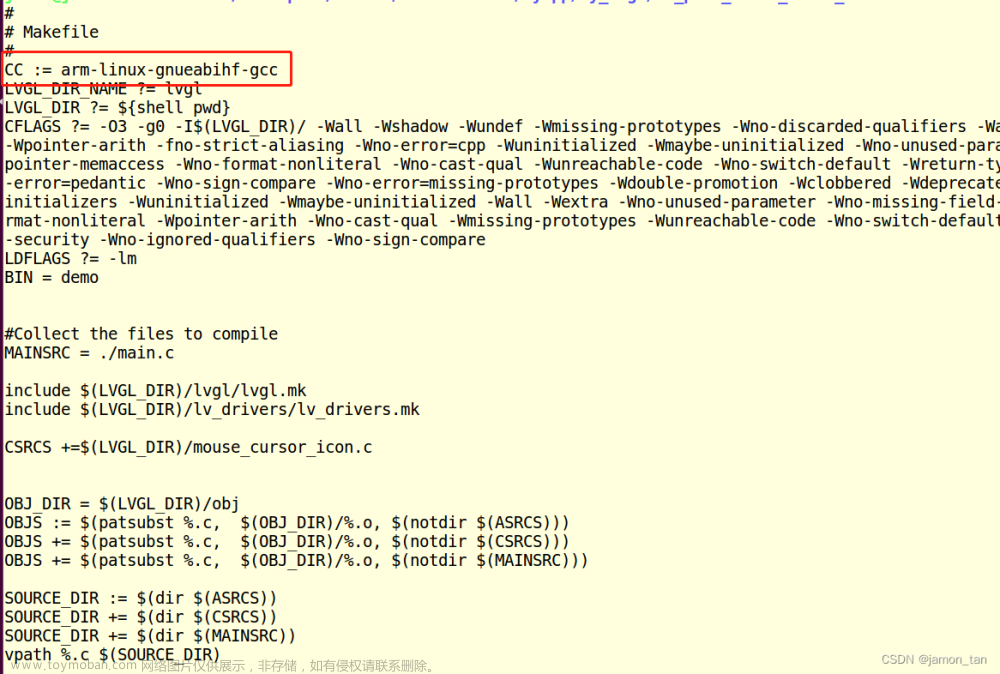
linux内核移植和uboot移植总体上差不多 解压内核文件,这里改名如图一 图一 安装 lzop 库,否则内核编译会失败,提示“ recipe for target ‘arch/arm/boot/compressed/piggy.lzo sudo apt-get install lzop 创建打开工程目录 直接在顶层 Makefile 文件里面定义 ARCH 和 CROSS_COMPILE 这两个的变量值为 “
-
keil移植linux(makefile)
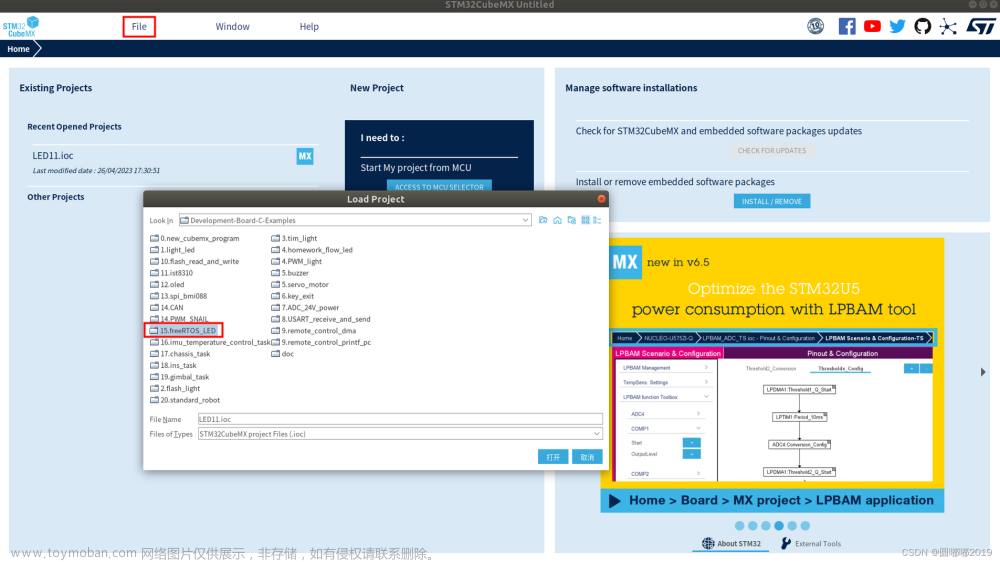
ubuntu18.04.melodic 宏基暗影骑士笔记本 stm32f427IIH6 stlink 9-24v可调电源 robomaster A 板 1)修改cubeMX配置 选择makefile 2)setting设置 3)launch设置 修改成以下内容:可执行文件名是freeRTOS_LED.elf 4)修改makefile makefile中只包含工程生成的src文件,没有包含applications中的编写的 .c 文件 make,报错内
-
OpenSSH移植到Linux开发板
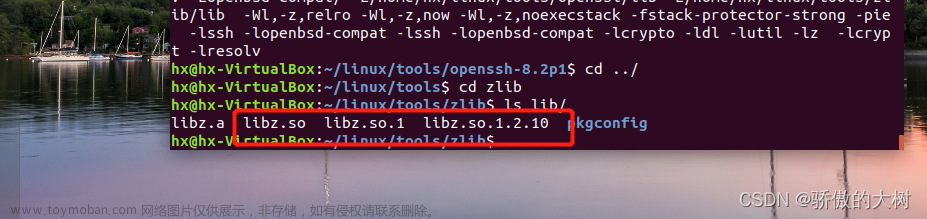
在Linux开发中,有时候需要远程登录到开发板上对系统进行一些操作,这个时候就需要用到SSH服务。SSH(Secure Shell 安全外壳协议)是较可靠,专为远程登录会话和其他网络服务提供安全性的协议,OpenSSH是SSH协议的一个免费开源版本。 这里一共需要移植三个软件包: zlib,openss
-

rk3399移植linux kernel
参考文章: 1.RK3399移植u-boot 2.I.MX6Q-SDB开发板移植ubuntu 3.Rockchip RK3399 - 移植ubuntu 20.04.4根文件系统 4.Rockchip RK3399 - 移植uboot 2023.04 linux 6.3 在前一节中移植了rk3399的u-boot,这一节就继续移植linux kernel。不过rk3399在移植kenel前,需要先制作根文件系统,这样才能在生成内核镜像
-
linux(全志)初始环境到移植lvgl
安装vim: 安装git工具 对于F1C200S,使用的交叉工具链必须高于,使用的交叉工具链必须高于6.0。 本文选择7.2.1进行u-boot和kernel的编译。 官网下载链接:https://releases.linaro.org/components/toolchain/binaries/7.2-2017.11/arm-linux-gnueabi/gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi.tar.xz 下载后解压 或右
-
嵌入式开发之linux内核移植
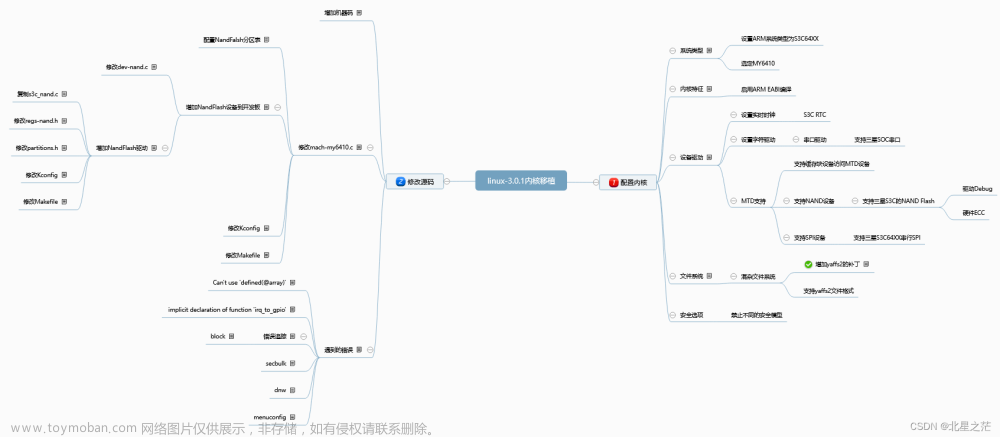
目录 前言 一、下载内核源码 1.1 下载linux-3.0.1 1.2 解压源码文件 二、 内核添加yaffs2文件系统支持 2.1 下载yaffs2 2.2 内核添加yaffs2文件补丁 三、配置开发板 3.1 修改机器ID 3.2 添加开发板初始化文件 3.3 配置NandFalsh 3.3.1 添加NandFlash设备 3.3.2 添加NandFlash驱动 3.3 修改Kconfig(支持
-
Linux系统移植一:移植U-BOOT 添加自己的板子并编译(非petalinux版)
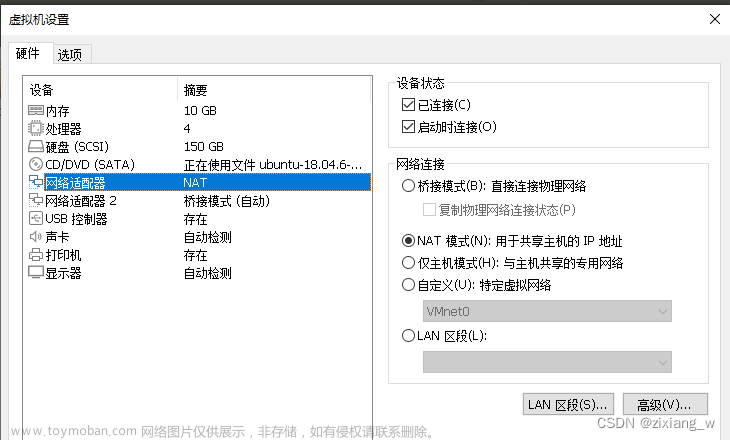
hdf设计:vivado 2017.4套件 交叉编译环境: arm-linux-gnueabihf- 虚拟机Linux系统版本:ubuntu 16.04 开发板:ALINX AX7Z100 开发板(ZYNQ7100) 不使用 petalinux 工具,尽管它提升了开发效率,能直接生成 BOOT.BIN 和 image.ub 但是这种方法既不利于学习移植过程,又不灵活,一旦有什么新的需要就
-
Uboot、Linux BSP定制,最小系统移植
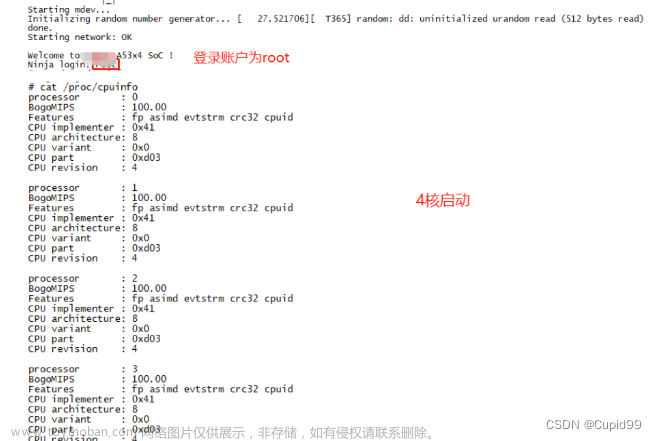
目录 一、linux操作系统支持哪些处理器 二、linux支持哪些版本 三、linux支持哪些外设IP 四、 现有操作系统举例 五、 uboot下支持的外设 目前已经linux SOC有Cortex-A5x2 Cortex-A9x4,Cortex-A53x4,Riscv-v 已经支持的linux版本有:4.14.158, 5.4.179,5.4.0 UART串口打印 支持,并且支持多路串口,快
-
linux | RK3568 Debian AIC8800移植
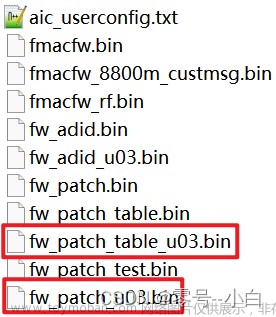
一、WiFi 1.看RK的文档,把DTS节点配好 然后直接从安卓13的项目中把驱动给移过来,文件位置是 kernel/drivers/net/wireless/rockchip_wlan/,然后在Makefile和Kconfig中加入对应的宏 然后再在rockchip_linux_defconfig中加入对应的宏: 然后编译,编译后出错: 然后编译就成功了 先手动将
-
【移植Ardupilot的日志记录方法到linux上】
采用二进制文件记录,可在mission planer查看 支持所有数据类型记录 精巧移植方便 可直接在地面站绘制曲线查看 可导出生成mat文件在matlab上分析 提供的日志目标结构 日志头 日志消息类型 消息长度 日志消息名称 数据类型标识 数据标签 数据单位 数据格式 数据结构体定义:
-

FTP服务器移植到Linux开发板
提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档 提示:这里可以添加本文要记录的大概内容: 将Linux开发板作为一个小型的 FTP 服务器,这样就可以通过 FileZilla 软件直接在开发板和 windows 之间通过网络进行文件互传。在开发板上搭建 FTP 服务器很简单
-
嵌入式Linux下LVGL的移植与配置
https://github.com/lvgl/lvgl git下载方式 git clone https://github.com/lvgl/lvgl.git 链接:https://pan.baidu.com/s/1jyqIennsQpv-RB4RyKvZyg?pwd=c68e 提取码:c68e 注意: 以下的配置均基于个人移植的sdk上修改. 解压sdk源码后修改Makefile文件,修改如下 直接修改编译器(编译器需要添加进系统的
-
分享一种快速移植OpenHarmony Linux内核的方法
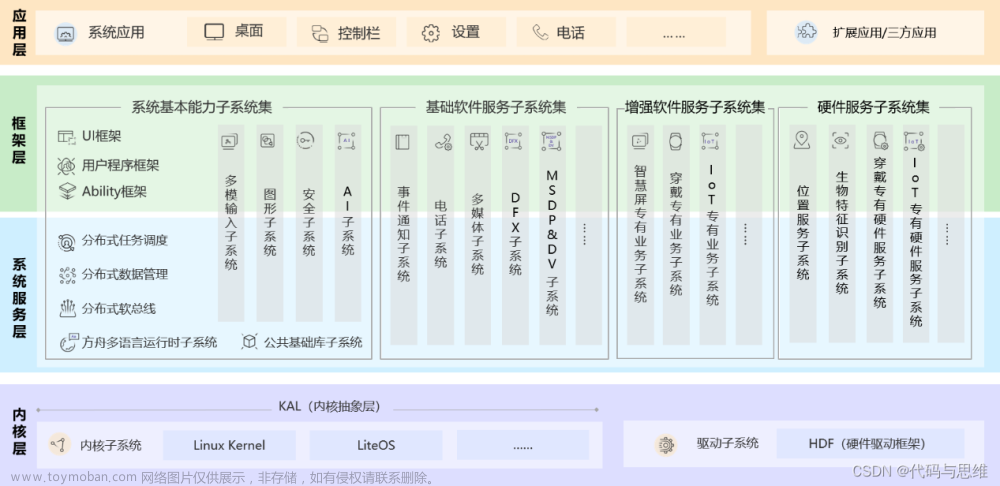
本文面向希望将 OpenHarmony 移植到三方芯片平台硬件的开发者,介绍一种借助三方芯片平台自带 Linux 内核的现有能力,快速移植 OpenHarmony 到三方芯片平台的方法。 内核态层和用户态层 为了更好的解释整个内核移植,首先需要介绍一些概念: 我们可以把 OpenHarmony 简单的分为
-
嵌入式Linux底层系统开发 +系统移植+内核文件系统(基础)
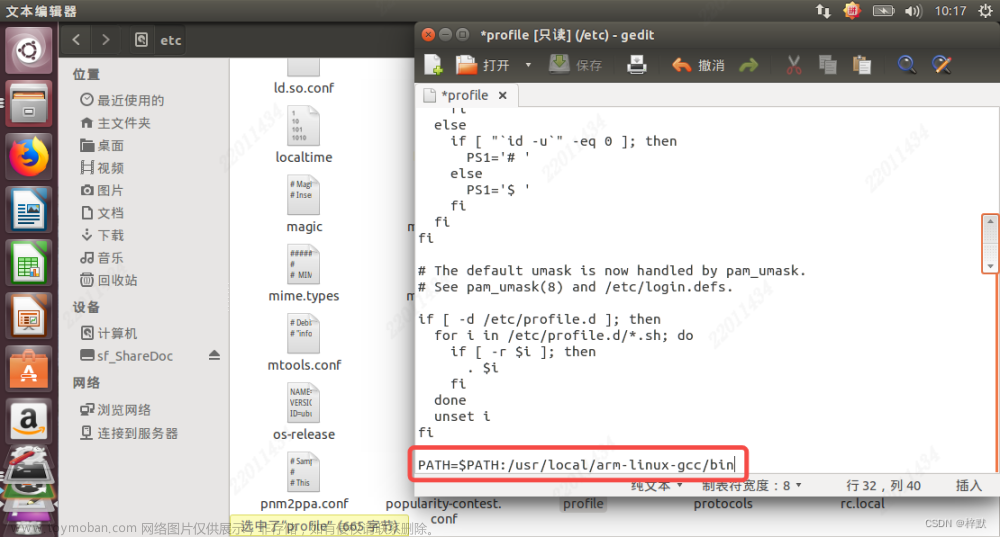
搭建交叉编译开发环境 bootloader的选择和移植 kernel的配置、编译、移植和调试 根文件系统的制作 前两个要点通常芯片厂家提供。后边两个要点是公司的工作重点。 学习方法:先整体后局部,层层推进 如何编译—如何添加命令和功能—如何定义自己的开发板。 移植的基本步
-
PHY芯片的使用(三)在linux下网络PHY的移植
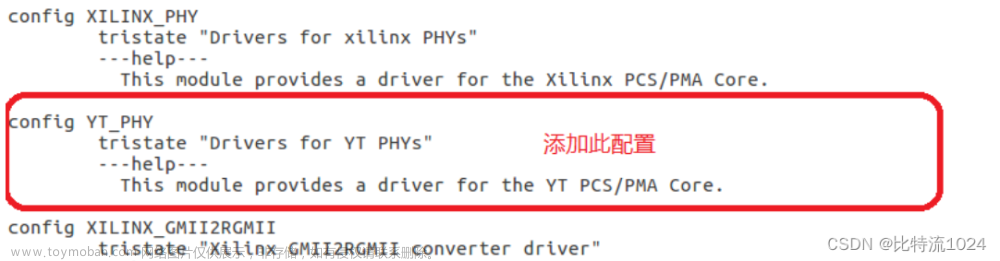
1 前言 配置设备树请参考上一章。此次说明还是以裕太的YT8511芯片为例。 2 需要配置的文件及路径 a. 在 .. /drivers/net/phy 目录下添加 yt_phy.c 文件(一般来说该驱动文件由厂家提供); b. 修改.. /drivers/net/phy 目录下的 Kconfig 文件,如下图所示。 c. 修改.. /drivers/net/phy 目录下的
-
Linux内核移植:内核的启动过程分析、启动配置与rootfs必要文件
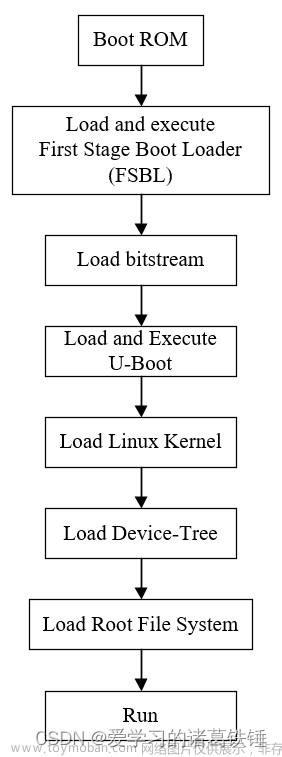
内核启动通常包括4个阶段: iROM代码启动(BIOS启动)。开发板上电后,先执行内部iROM中的固化代码,类似于BIOS,执行通电自检和初始化过程,包括初始化CPU、存储器、时钟、总线等一些必要的硬件资源。 启动引导加载程序BootLoader。根据启动引脚的电平,读取相应的存储
-
linux(全志F1C100S/F1C200S)系列02:移植LCD st7789驱动,LVGL8.3移植
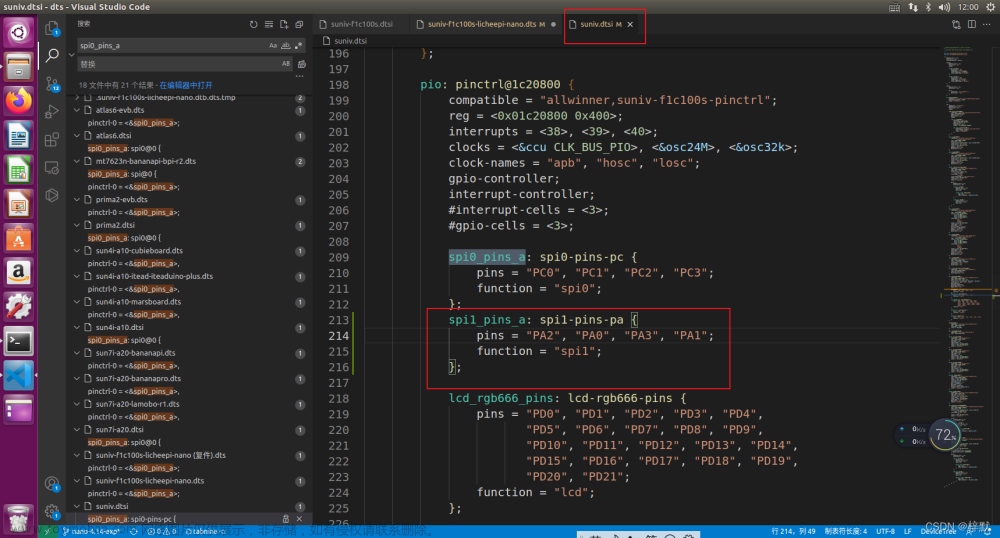
st7789V中指定了rst与dc引脚,pio 4 3 对应PE3,pio 4 5对应PE5; 详细配置方式见链接:全志 :gpio使用 需要根据自身硬件配置。 Tips:更改 spi-max-frequency = 32000000 - spi-max-frequency = 100000000; 和 fps = 30; 改为 fps = 60; 感谢楼下老哥提示。 rotate = 90;根据屏幕方向更改。 只需要更改下面的三个地
-

Zynq-Linux移植学习笔记之62- PL挂载复旦微flash
现在为了全国产化需要,之前所有的进口flash全部要换成国产flash 其中EFM25QU256和EFM25QL256对标winbond的w25q256 nor flash 复旦微flash只支持单线模式,当使用PL侧的IP核访问时,需要设置模式为standard 内核中修改m25p80.c,设置兼容的flash型号 同时复旦微flash推荐使用jffs2文件
-
基于全志A33开发板linux系统移植学习记录(Boot0)
第一章 Boot0基于ARMGCC的编译与修改 入行快两年,希望通过学习系统移植巩固下相关的知识,目标板使用基于全志A33 的astar-parrot开发板,开始本来想着使用Boot0来加载uboot,但后期发现为了代码统一和便捷性,最终还是选择了SPL作为跳板,但Boot0流程相对清晰,所以将对其做的