linux驱动移植教程
-
linux(全志)初始环境到移植lvgl
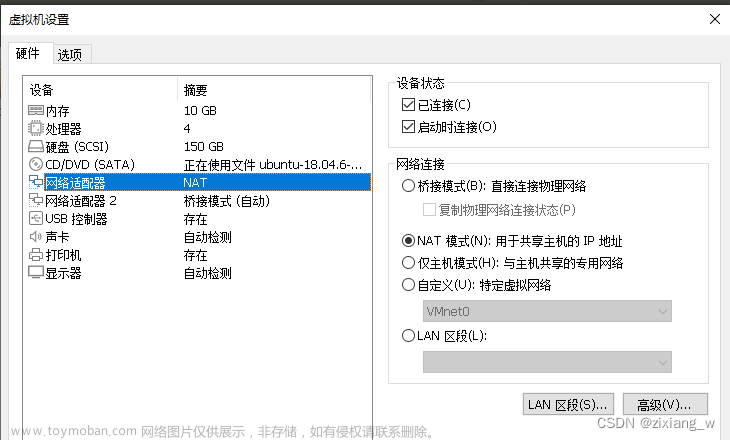
安装vim: 安装git工具 对于F1C200S,使用的交叉工具链必须高于,使用的交叉工具链必须高于6.0。 本文选择7.2.1进行u-boot和kernel的编译。 官网下载链接:https://releases.linaro.org/components/toolchain/binaries/7.2-2017.11/arm-linux-gnueabi/gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi.tar.xz 下载后解压 或右
-
Linux系统移植一:移植U-BOOT 添加自己的板子并编译(非petalinux版)
hdf设计:vivado 2017.4套件 交叉编译环境: arm-linux-gnueabihf- 虚拟机Linux系统版本:ubuntu 16.04 开发板:ALINX AX7Z100 开发板(ZYNQ7100) 不使用 petalinux 工具,尽管它提升了开发效率,能直接生成 BOOT.BIN 和 image.ub 但是这种方法既不利于学习移植过程,又不灵活,一旦有什么新的需要就
-

全网最简单的stm32f103c8t6移植ucosiii教程(附移植好的工程)
最近在做一个机器人项目,需要使用到stm32f103c8t6核心板。考虑程序中的多任务特性,因此决定使用ucosiii用于多任务管理。ucosiii移植可能对于一些嵌入式老鸟来说,可能是信手拈来,但是对于很多新手特别是刚入门的小白来说还是有一定的难度的。尤其是全网的移植教程
-

【万字详细教程】Linux to go——装在移动硬盘里的Linux系统(Ubuntu22.04)制作流程;一口气解决系统安装/引导文件迁移/显卡驱动安装等问题
如果不想看前面的废话😭,请跳转到 1.准备工具 处开始阅读。 制作基于PSSD的Linux to go系统是我很早就打算做的事情,但这毕竟不是常规的装系统,因此在这之前我也调研了许多经验贴,不过我的思路是找到一个看起来最靠谱而且步骤相对简单的帖子,然后一路跟着走下去。
-

LuaJit交叉编译移植到ARM Linux
Lua与LuaJit的主要区别在于LuaJIT是基于JIT(Just-In-Time)技术开发的,可以实现动态编译和执行代码,从而提高了程序的运行效率。而Lua是基于解释器技术开发的,不能像LuaJIT那样进行代码的即时编译和执行。因此,在运行速度方面,LuaJIT要比Lua快得多。此外,LuaJIT还支持更多的
-
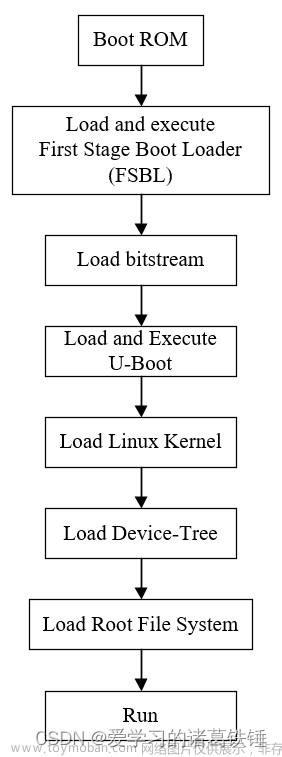
Uboot、Linux BSP定制,最小系统移植
目录 一、linux操作系统支持哪些处理器 二、linux支持哪些版本 三、linux支持哪些外设IP 四、 现有操作系统举例 五、 uboot下支持的外设 目前已经linux SOC有Cortex-A5x2 Cortex-A9x4,Cortex-A53x4,Riscv-v 已经支持的linux版本有:4.14.158, 5.4.179,5.4.0 UART串口打印 支持,并且支持多路串口,快
-
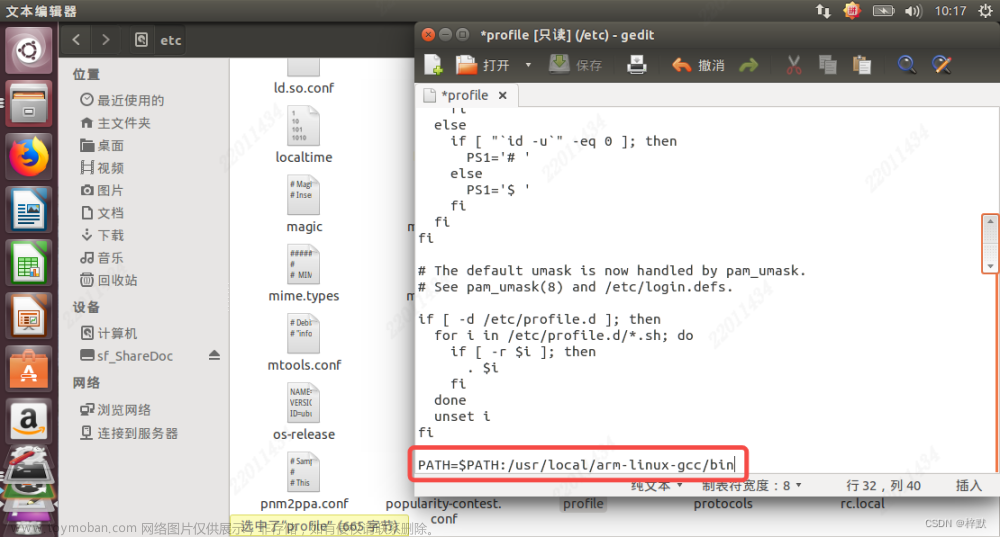
linux下将QT移植至arm环境
讲下整个项目流程,我们的目标是把qt编出来程序放在arm开发板上面跑,首先下载QT源码和tslib源码(QT源码编译和QT程序运行需要tslib库的支持),在虚拟机里使用交叉编译将QT源码编译安装,会生成arm环境的库文件和qmake,然后在虚拟机里安装qt的Linux版本,安装好后配置qt的编
-
基于STM32F4的CANOpen移植教程(超级详细)
本专题相关教程: 基于STM32F4的CANOpen移植教程 基于STM32F4的CANopen快速SDO通信 linux下CANopen for python的使用 基于Linux C的CANopen移植 CANopen补充–时间计算出错 CANopen补充–主站检测节点是否在线 为了在STM32F4上能够运行CANopen(CanFestival),跟着网上的教程操作,发现总是不够详细。
-
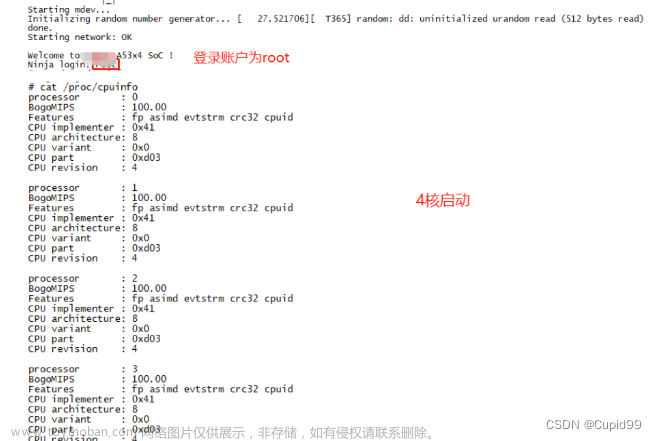
linux | RK3568 Debian AIC8800移植
一、WiFi 1.看RK的文档,把DTS节点配好 然后直接从安卓13的项目中把驱动给移过来,文件位置是 kernel/drivers/net/wireless/rockchip_wlan/,然后在Makefile和Kconfig中加入对应的宏 然后再在rockchip_linux_defconfig中加入对应的宏: 然后编译,编译后出错: 然后编译就成功了 先手动将
-

Linux交叉编译opencv并移植ARM端
Linux交叉编译opencv并移植ARM端 - 知乎 目标平台为arm7l,此为32位ARM架构,要安装合适的编译器 注意:64位ARM架构的编译器与32位ARM架构的编译器不能通用 opencv的交叉编译工具链在../opencv3.2.0/platforms/linux 路径下,linux文件夹下是一些.cmake文件,对应不同的移植对象,我需要在rv
-

FTP服务器移植到Linux开发板
提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档 提示:这里可以添加本文要记录的大概内容: 将Linux开发板作为一个小型的 FTP 服务器,这样就可以通过 FileZilla 软件直接在开发板和 windows 之间通过网络进行文件互传。在开发板上搭建 FTP 服务器很简单
-
【移植Ardupilot的日志记录方法到linux上】
采用二进制文件记录,可在mission planer查看 支持所有数据类型记录 精巧移植方便 可直接在地面站绘制曲线查看 可导出生成mat文件在matlab上分析 提供的日志目标结构 日志头 日志消息类型 消息长度 日志消息名称 数据类型标识 数据标签 数据单位 数据格式 数据结构体定义:
-
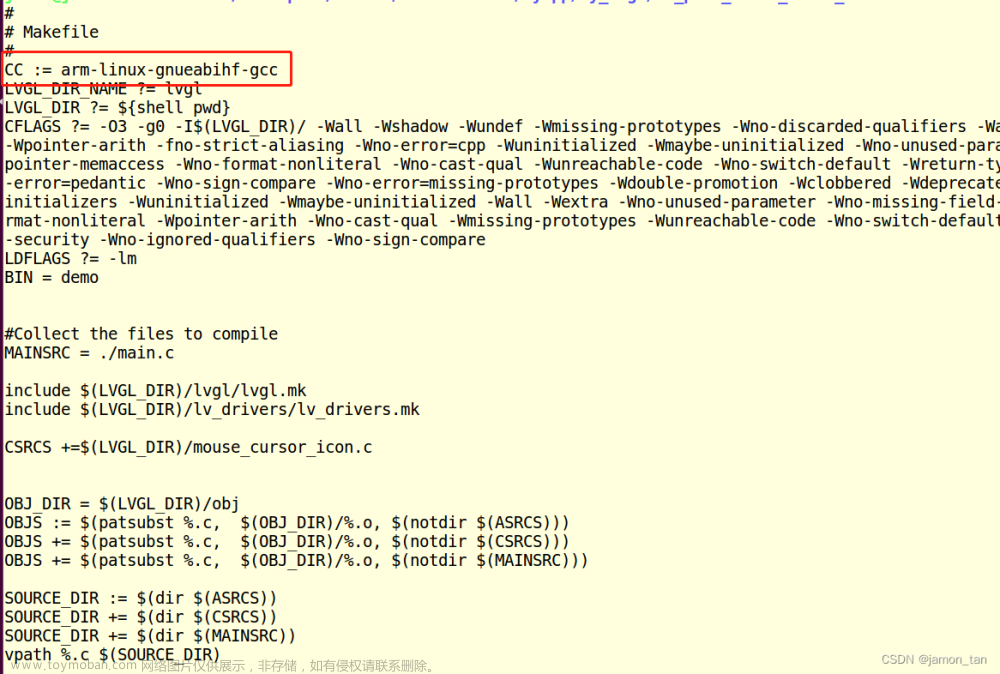
嵌入式Linux下LVGL的移植与配置
https://github.com/lvgl/lvgl git下载方式 git clone https://github.com/lvgl/lvgl.git 链接:https://pan.baidu.com/s/1jyqIennsQpv-RB4RyKvZyg?pwd=c68e 提取码:c68e 注意: 以下的配置均基于个人移植的sdk上修改. 解压sdk源码后修改Makefile文件,修改如下 直接修改编译器(编译器需要添加进系统的
-

STM32平台下官方DMP库6.12超详细移植教程
Motion Driver官方库:Motion_Driver_6.12 STM32工程源码:STM32F103C8-软件MPU6050(DMP) MPU6050软件I2C驱动,带OLED显示,移植了匿名地面站,可显示姿态信息(匿名地面站通信协议6.0版本,本人使用测试的匿名地面站版本V6.56版本) —————————————————————————
-
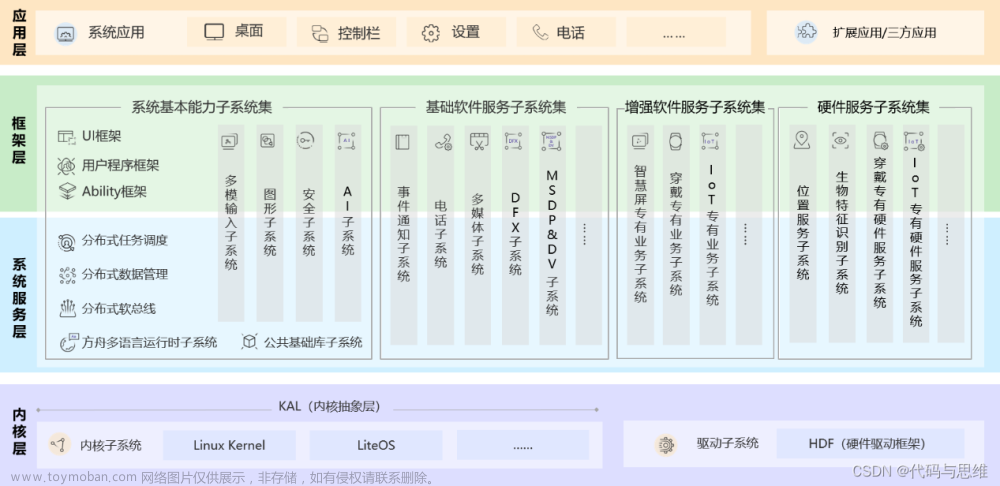
分享一种快速移植OpenHarmony Linux内核的方法
本文面向希望将 OpenHarmony 移植到三方芯片平台硬件的开发者,介绍一种借助三方芯片平台自带 Linux 内核的现有能力,快速移植 OpenHarmony 到三方芯片平台的方法。 内核态层和用户态层 为了更好的解释整个内核移植,首先需要介绍一些概念: 我们可以把 OpenHarmony 简单的分为
-
高云FPGA系列教程(9):cmd-parser串口命令解析器移植
本文是高云FPGA系列教程的第9篇文章。 上一篇文章介绍片上ARM Cortex-M3硬核处理器 串口外设 的使用,演示轮询方式和中断方式接收串口数据,并进行回环测试。 本文在上一篇工程的基础上,移植cmd-parser串口命令解析器,到高云GW1NSR-4C ARM处理器上,实现3个命令:
-
嵌入式Linux底层系统开发 +系统移植+内核文件系统(基础)
搭建交叉编译开发环境 bootloader的选择和移植 kernel的配置、编译、移植和调试 根文件系统的制作 前两个要点通常芯片厂家提供。后边两个要点是公司的工作重点。 学习方法:先整体后局部,层层推进 如何编译—如何添加命令和功能—如何定义自己的开发板。 移植的基本步
-
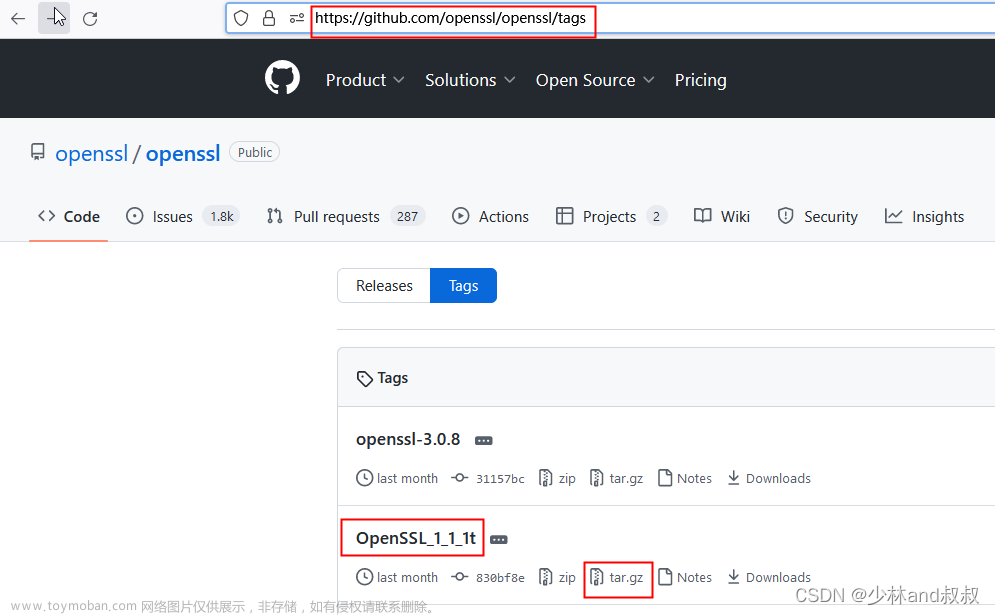
基于嵌入式linux的OpenSSL源码移植(基于arm64)
SSL是Secure Sockets Layer(安全套接层协议)的缩写,可以在Internet上提供秘密性传输。Netscape公司在推出第一个Web浏览器的同时,提出了SSL协议标准。其目标是保证两个应用间通信的保密性和可靠性,可在服务器端和用户端同时实现支持。已经成为Internet上保密通讯的工业标准。
-
记录移植Python3到arm开发板linux系统中
开发板情况 arm板是公司采购的工控机。主要用来 使用python3解析excel表格处理数据。 配置如下: 配置 版本 cpu imx6dl(armv7架构) 操作系统 linux3.10 python版本 2.7 项目情况 项目中最好使用 python3 。可行的有以下几种方式: 方式 优缺点 可行度 重做文件系统 订制程度比较高,后期增
-
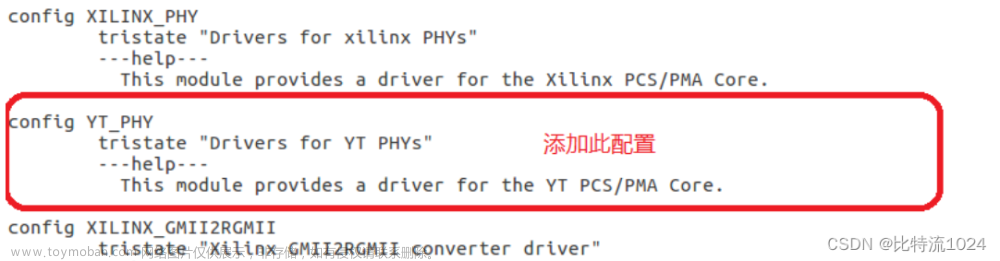
PHY芯片的使用(三)在linux下网络PHY的移植
1 前言 配置设备树请参考上一章。此次说明还是以裕太的YT8511芯片为例。 2 需要配置的文件及路径 a. 在 .. /drivers/net/phy 目录下添加 yt_phy.c 文件(一般来说该驱动文件由厂家提供); b. 修改.. /drivers/net/phy 目录下的 Kconfig 文件,如下图所示。 c. 修改.. /drivers/net/phy 目录下的